






matlabB样条轨迹规划,多目标优化,7次非均匀B样条轨迹规划,
基于NSGAII遗传算法,实现时间 能量 冲击最优。
换上自己的关节值和时间就能用
代码有中文注释,新手勿拿。
ID:3259681739384807
毅路有你?
在现代工业自动化和机器人领域,轨迹规划是一个非常重要的研究领域。通过规划合理的轨迹,可以使机器人在执行任务过程中具有高效性、稳定性和安全性。而在轨迹规划中,B样条轨迹规划是一种经典的方法,它通过对曲线进行插值和逼近,生成光滑的轨迹。
本文将围绕B样条轨迹规划展开讨论,并重点介绍一种基于NSGAII遗传算法的多目标优化方法,以实现时间、能量和冲击最优的7次非均匀B样条轨迹规划。
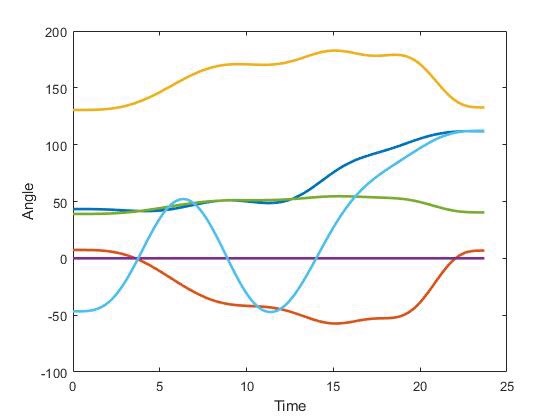
首先,我们先来了解一下B样条曲线和B样条轨迹的基本概念。B样条曲线是一种曲线拟合的方法,通过对给定的控制点进行插值和逼近,得到一条光滑的曲线。B样条曲线具有局部控制性和光滑性的特点,使得它在轨迹规划中有着广泛的应用。
在B样条轨迹规划中,我们希望通过给定的控制点和时间序列,生成一条满足要求的轨迹。而在多目标优化中,我们需要综合考虑时间、能量和冲击这三个重要的指标,以实现最优的轨迹规划结果。
NSGAII遗传算法是一种经典的多目标优化算法,它通过模拟自然选择和遗传进化的过程,来搜索最优解的近似集合。在本文中,我们将结合B样条轨迹规划和NSGAII遗传算法,提出一种有效的多目标优化方法。
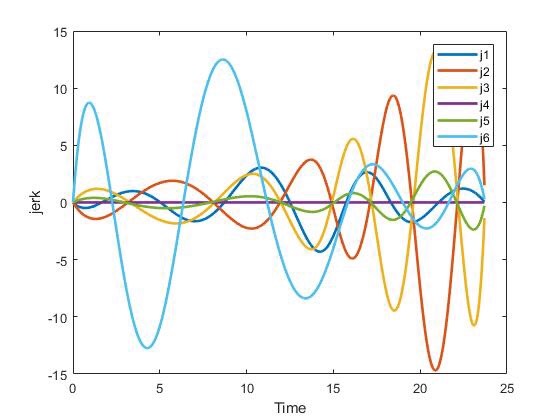
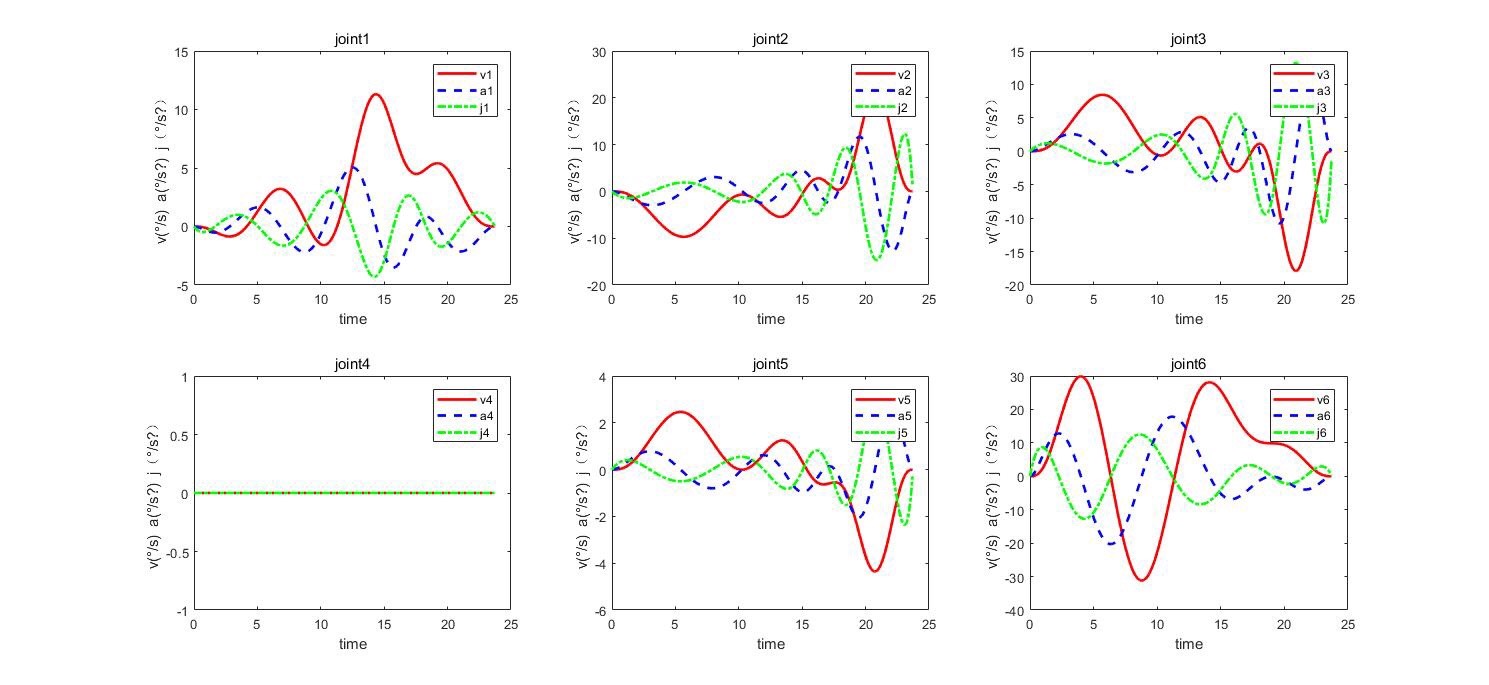
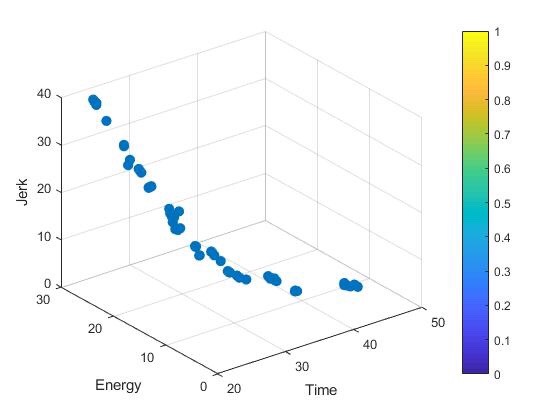
具体而言,我们首先需要确定轨迹规划的目标函数。在这里,我们将时间、能量和冲击分别作为三个独立的目标。时间指标表示执行轨迹所需要的时间,能量指标表示机器人执行轨迹所消耗的能量,而冲击指标表示轨迹规划过程中机器人所受到的冲击力。
接下来,我们需要进行B样条轨迹的参数化。通过合理选择B样条的控制点和时间序列,我们可以实现对曲线形状的灵活调节。在这里,我们特别强调了7次非均匀B样条轨迹规划。通过选择7次B样条曲线,我们可以更好地拟合曲线形状,并保证轨迹的光滑度和灵活度。
然后,我们将NSGAII遗传算法应用于B样条轨迹规划中。通过对参数空间进行搜索和优化,我们可以得到一组非劣解的轨迹规划结果。这些非劣解表示了时间、能量和冲击三个指标之间的权衡关系,使得我们可以根据具体任务的要求,选择合适的轨迹规划结果。
最后,我们还提供了一份带有中文注释的代码。这份代码可以帮助初学者更好地理解和使用我们提出的B样条轨迹规划方法。通过修改关节值和时间序列,用户可以根据具体需求,快速生成适用于自己任务的轨迹规划结果。
综上所述,本文围绕matlabB样条轨迹规划,多目标优化,7次非均匀B样条轨迹规划展开讨论,基于NSGAII遗传算法,实现时间、能量和冲击最优的目标。通过本文的研究与讨论,我们可以为自动化行业的工程师和研究者提供一个有效的轨迹规划方法,以提高机器人的运动性能和工作效率。希望本文的内容能够对读者有所启发和帮助。
相关的代码,程序地址如下:http://fansik.cn/681739384807.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









