







BA优化时间跟特征点数量有关,特征点数量越多BA消耗时间越长。折衷做法是,在进行几次优化后,将特征点位置固定,不再优化特征点,只优化相机位姿。位姿图优化是一中方法。场景如下:
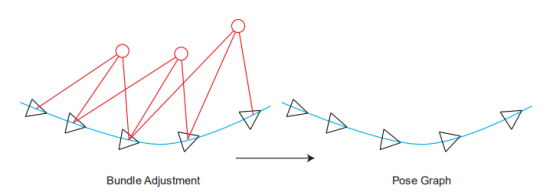
三角形节点表示相机位姿,用表示,蓝色的边表示两相机位姿之间的相对运动,
表示
之间的相对位姿变化。图优化的目的是为了优化
,方法是利用
与
之间的相对关系构建最小二乘问题进行优化求解。
首先根据两帧的位姿可以得到相对位姿变换:
李群表达式:
实际的,即
值根据i,j两帧图像利用2D-2D(对极几何)得到。优化的目的就是让
可以写成:
求解该优化问题一般采用LM法,需要计算偏导数并求解H,以通过增量方程求解优化量。
给分别左乘以一个扰动
:
套用伴随性质(附在后文)得到:
泰勒展开合并得到:
则的偏导数如下:
得到偏导数即可求解增量方程解决优化问题。
伴随性质:
旋转群伴随性质:
变换群伴随性质:
其中:














 939
939











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









