







2021年全国大学生电子设计大赛赛题解析与预测

参考链接
往年赛题解析:
2015年无人机赛题:
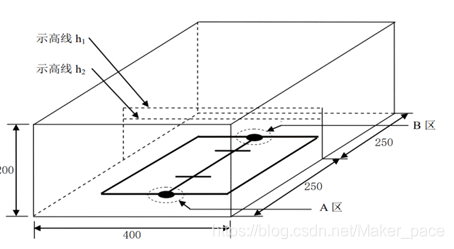
2015年无人机赛题:(2015)基本目标:
- 从A点起飞,飞行至B区 降落
- 从A点起飞,逆时针绕框飞行一周
- 抓起小铁片飞行,投放至B区:
_(2015)发挥目标:
- 从A点起飞,将放置B区的小铁片抓取后飞回A区
(2015)赛题分解:
| 赛题 | 任务分解 | 分步解析 | 涵盖知识点 | 归属技能分类 |
|---|---|---|---|---|
| 基本要求 | 从AD点起飞飞行至B区 | 稳定的垂直飞行 | 稳定的高度控制 | 飞控 |
| 悬停在特定高度 | 特征点识别 | 识别 | ||
| 寻找A点区域并飞行 | 特征点跟随技能 | 识别 | ||
| 以一定速度沿黑线飞行,并判断是否到达B区上空 | 通信队列技术&IMU水平方向速度估算 | 飞控 | ||
| 到达B区后悬停在B区上空 | 水平方向速度控制 | 飞控 | ||
| 稳定降落B区后悬停在B区上空 | 整体飞行逻辑设计能力 | 逻辑 | ||
| 发挥部分 | 从A点起飞,逆时针绕框飞行一周 | 识别到直角并且转折飞行,并计算直角数量,到达终点后降落锁定 | 直角特征点识别或反向识别 | 飞控 |
| 抓起小贴片飞行,投放至B区 | 从A点使用电磁铁吸取小铁片,释放小铁片 | 开关电源设计 | 电路设计 |
2017年赛题分析:
2017年无人机赛题:(2017)年基本目标:
从A点起飞,飞行至B区,悬停5秒即可
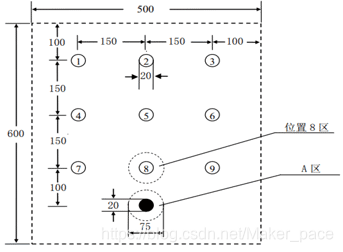
(2017)发挥部分:
从A点起飞,飞行至于8区,8区内有小车,遥控2区,飞机跟随小车飞行到2区即可
| 赛题 | 任务分解 | 分步解析 | 涵盖知识点 | 归属技能分类 |
|---|---|---|---|---|
| 基本要求 | 从A点飞行,飞行至8区悬停5秒 | 稳定的垂直飞行 | 稳定飞控飞行技术 | 飞控 |
| 悬停到特定的高度 | 稳定的飞行高度控制技术 | 飞控 | ||
| 以固定航向想千飞行并寻找8区 | 稳定水平方向速度控制技术 | 飞控 | ||
| 到达8区后悬停在B区上空 | 特征点识别技术 | 飞控 | ||
| 稳定降落在B区,关闭电机,锁定 | 稳定速度自动降落技术 | 飞控 | ||
| 发挥部分 | 从A点飞行,飞行至于8区, | +找到小车 | 稳定的水平方向控制技术 | |
| 8区内有小车,遥控小车到2区,飞机跟随小车到2区 | +稳定跟随 | 飞控 |
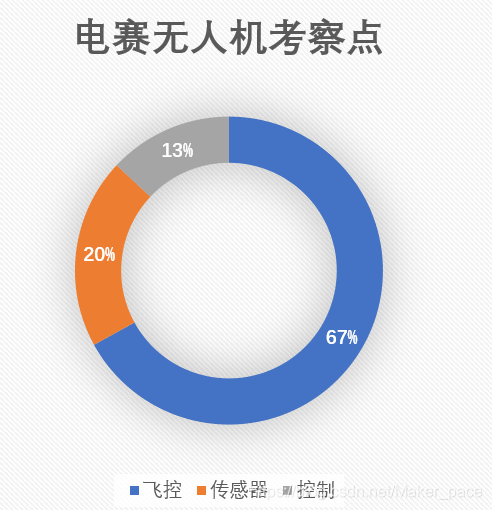
考察点分析:
- 飞控是考察点最大部分
- 传感器应用建立在飞控技术之上,飞行稳定,才能实现传感,控制发挥,飞控是更高功能实现的基础
- 逻辑运算在飞机错误的飞行之中,可以保证飞机能回正常位置中,这部分工作量,并不大,却很重要,更多的工作量在于图像传感器的编写和调试上
得分关键点:
| 2017年赛题 | 项目 | 主要内容 | 满分 |
|---|---|---|---|
| 设计报告20分 | 系统方案 | 方案比较、方案描述 | 3 |
| 设计与论证 | 控制方法描述与参数技术 | 5 | |
| 电路与程序设计 | 系统组成、原理框图与各部分电路图,系统软件与流程图 | 6 | |
| 测试方案与测试结果 | 测试方案及测试条件,测试结果完整性,测试结果分析 | 6 | |
| 设计报告结构即规范性 | 摘要:正文结构完整性;图标的规范性 | 6 | |
| 基本要求50分 | 完成(1) | 四旋翼自主飞行器(飞行器)拜访A区,一键启动飞行器,起飞并在不低于1m高度悬停,5s后A区降落停机,悬停期间激光笔照射A区内 | 25 |
| 完成(2) | 手持飞行器靠近小车,当两者距离在0.5m~1.5m范围内,飞行器和小车发出明显光标指示 | 25 | |
| 完成(3) | 小车摆放到位置8,飞行器摆放至A区,一键启动飞行器,飞至小车上方悬停5s后择地降落并停机,悬停期间激光笔应照射在位置8区内至少照射到小车一次,飞行时间不大于30s | ||
| 发挥部分 | 完成(1) | 小车摆放位置8,飞行器摆放至A区,一键启动飞行器,飞至小车上方且悬停5秒择地降落,悬停器件激光笔应照射到位置8区内且至少照射小车一次,飞行时间不大于30秒 | 3 |
| 完成(2) | 飞行器携带薄铁片投放至B区,飞行从示高线上方返回A区,在A区降落并停机 | 32 | |
| 完成(3) | 小车摆放在位置8,飞行器摆放在A区,一键启动飞行器,飞行至小车上方后,用遥控器使小车到达位置2停车,期间跟随小车飞行,小车静止后飞行器择地降落并停机,飞行时间不大于30s | 10 | |
| 其他 | 5 |

















 4715
4715

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









