







手把手教程 无屏幕的树莓派4b 安装Rapbian buster系统 安装ROS与MAVROS 连接pixhawk飞控 (1)
准备:树莓派4b *1
32G内存卡 *1
树莓派官方raspbian buster (pi4目前只支持此版本,暂不支持ubuntu mate)
win10 连接树莓派的软件:
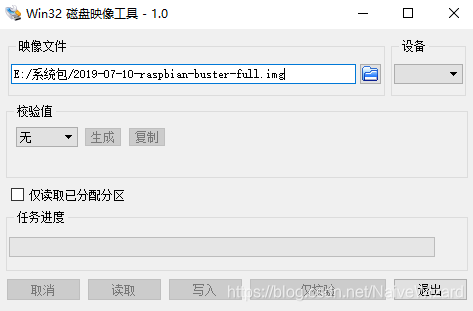
Win32DiskImager
Advanced IP Scanner
PuTTY
VNC Viewer
一.树莓派无屏幕连接PC端
1.下载镜像
https://www.raspberrypi.org/downloads/raspbian/ (我是选择完整桌面版本)
2.用 Win32DiskImager 将raspbian buster 烧录到内存卡中。
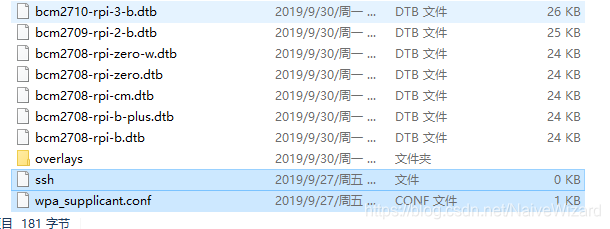
3.然后在win10中 建立一个空白的ssh文件和一个名为 wpa_supplicant ,将其拖入到已经安装好系统的SD卡中即可。(必须保证pc和树莓派在同一个局域网中)
wpa_supplicant内容如下:
country=CN
ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
update_config=1
network={
ssid=“wifi名字”
psk=“WiFi密码”
key_mgmt=WPA-PSK
priority=1
}
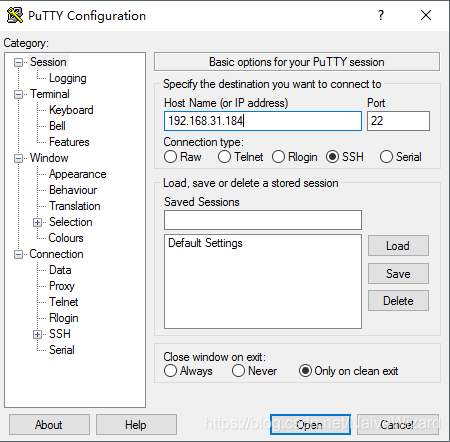
4.树莓派插入SD卡后,上电等待一分多钟。利用 Advanced IP Scanner 扫描出树莓派的ip地址后,利用PuTTY 尝试连接树莓派,出对话框选择是,并登录树莓派。

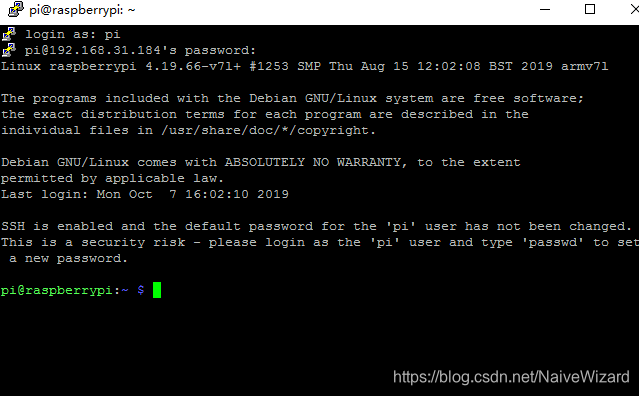
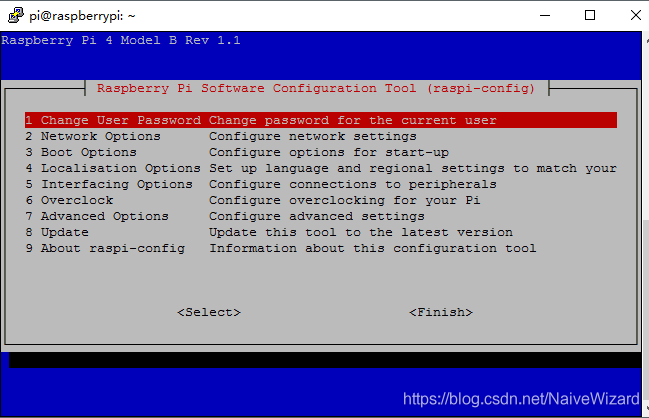
5.putty登录树莓派 用户:pi ,密码:raspberry。 输入指令 sudo raspi-config。
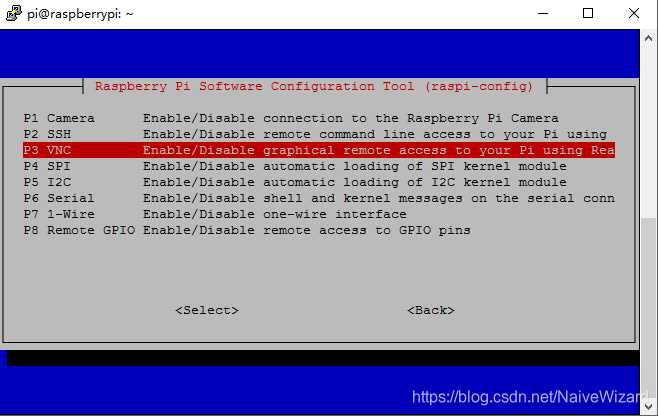
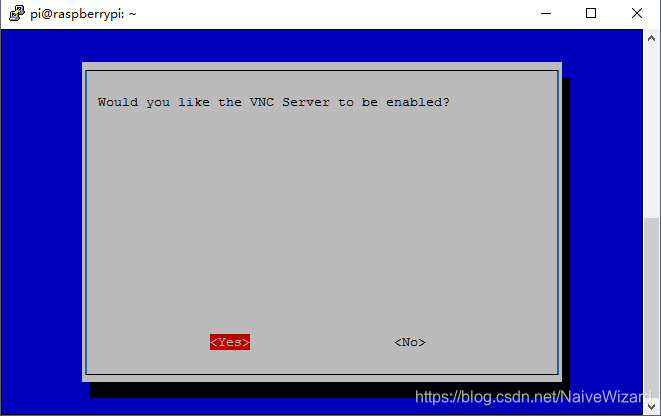
先选择第5项 回车,再选择 P3 vnc 项 回车,选择yes 回车 VNC功能就开启了。
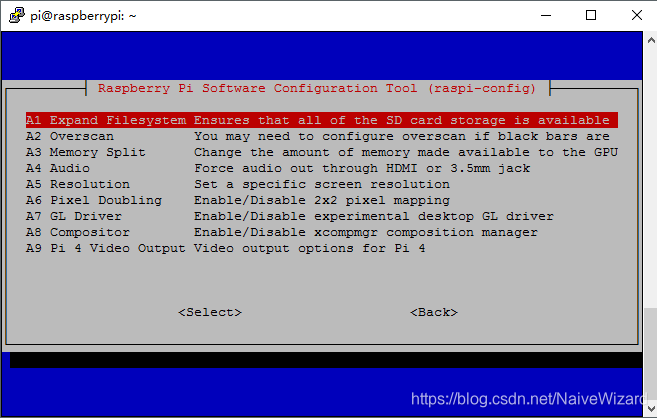
然后,选择第7项回车,再选择A1 回车,系统分区扩展完成。
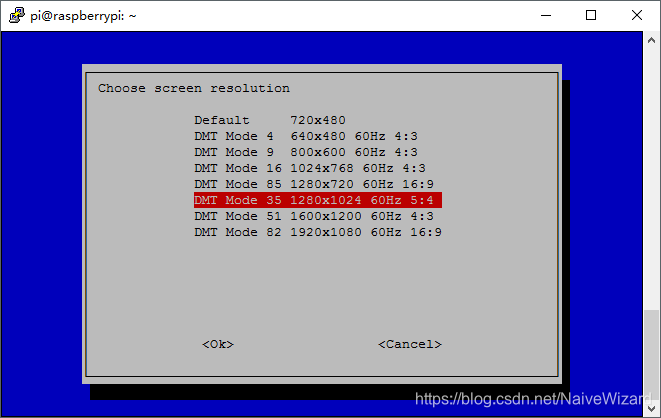
最后,选择第7项 回车,再选择A5 回车,选择mode 85 回车,树莓派分辨率设置完成。
退回主页面,输入 sudo reboot 重启树莓派 。
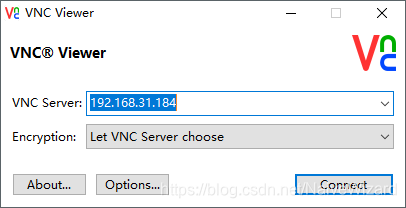
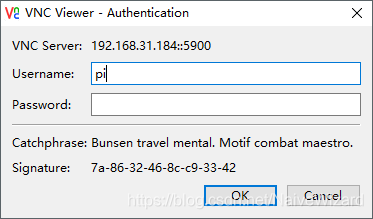
6.用vnc连接树莓派,先输入ip,点击continue,输入树莓派 账号密码 后,成功登入树莓派 。
至此 ,树莓派无屏幕连接pc端教程完毕。
参考链接:
1.https://blog.csdn.net/weixin_43909881/article/details/88927884
2.https://blog.csdn.net/weixin_42023805/article/details/82355338
二、树莓派安装ROS
我们安装melodic版本的ROS
1.先安装vim
sudo apt-get install vim
然后去ros官网找到melodic debian版本的安装教程
http://wiki.ros.org/melodic/Installation/Source
或者
https://www.seeedstudio.com/blog/2019/08/01/installing-ros-melodic-on-raspberry-pi-4-and-rplidar-a1m8/
(1) 安装依赖包和下载包
(注意:如果看官方教程,安装ROS-Comm版本,不要安装Desktop版本,没爬墙,容易出错。)
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt-get update
sudo apt-get install -y python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential cmake
sudo rosdep init
rosdep update
mkdir ~/ros_catkin_ws
cd ~/ros_catkin_ws
rosinstall_generator ros_comm --rosdistro melodic --deps --tar > melodic-ros_comm.rosinstall
wstool init -j8 src melodic-ros_comm.rosinstall
wstool update -j 4 -t src
(2) 额外的软件安装
mkdir -p ~/ros_catkin_ws/external_src
cd ~/ros_catkin_ws/external_src
wget http://sourceforge.net/projects/assimp/files/assimp-3.1/assimp-3.1.1_no_test_models.zip/download -O assimp-3.1.1_no_test_models.zip
unzip assimp-3.1.1_no_test_models.zip
cd assimp-3.1.1
cmake .
make
sudo make install
(3) Build and 源码 安装方式
cd ~/ros_catkin_ws
rosdep install --from-paths src --ignore-src --rosdistro melodic -y
sudo ./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release --install-space /opt/ros/melodic -j2
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
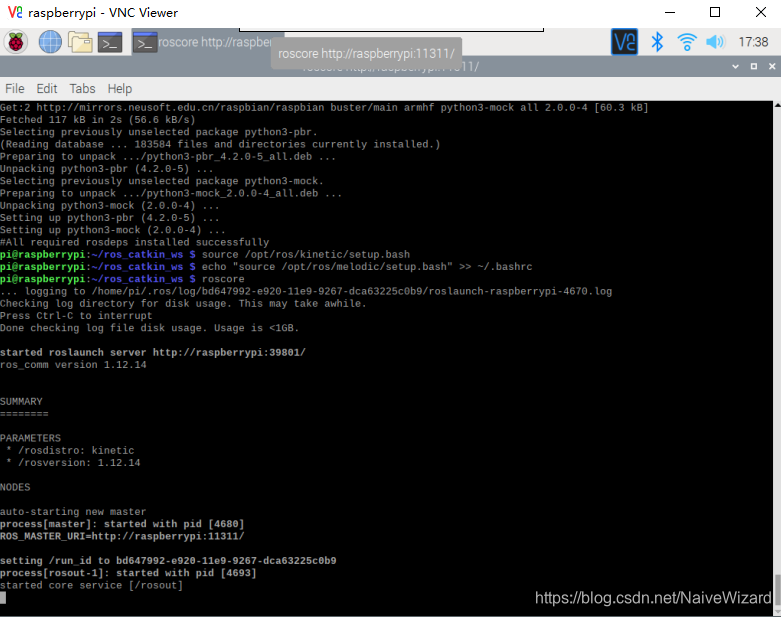
roscore
出现以下画面,ROS就算安装成功。
三 、安装melodic版本的MAVROS
我花了一个国庆节的时间,按照网上pi3的stretch和ubuntu教程安装,不断的重复安装kinetic版本ros与mavros N遍后,最后还是会有catkin build 报错 和 roslaunch mavros px4.launch 报错。因此我开始尝试安装melodic版本的MAVROS,成功了。
kinetic报错log如下:(暂不知什么原因)
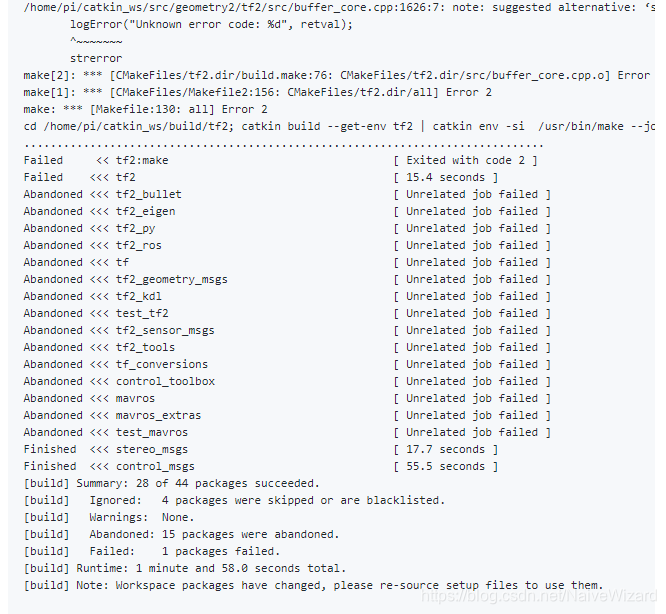
部分参考:https://github.com/mavlink/mavros/issues/1280
mavros官方的kinetic版本的教程:
https://github.com/mavlink/mavros/blob/master/mavros/README.md#source-installation
1.安装melodic版本的MAVROS
sudo apt-get install python-catkin-tools python-rosinstall-generator -y
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws
catkin init
wstool init src
rosinstall_generator --rosdistro melodic mavlink | tee /tmp/mavros.rosinstall
rosinstall_generator --upstream-development mavros mavros_extras mavros_msgs test_mavros sensor_msgs control_toolbox realtime_tools tf tf2_ros python_orocos_kdl urdf |tee -a /tmp/mavros.rosinstall
wstool merge -t src /tmp/mavros.rosinstall
wstool update -t src -j4
rosdep install --from-paths src --ignore-src -y
sudo ./src/mavros/mavros/scripts/install_geographiclib_datasets.sh
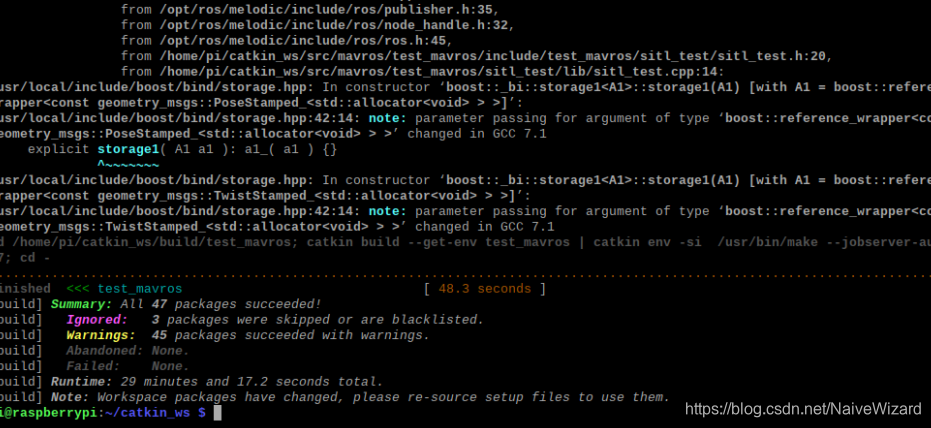
catkin build
如图:编译成功
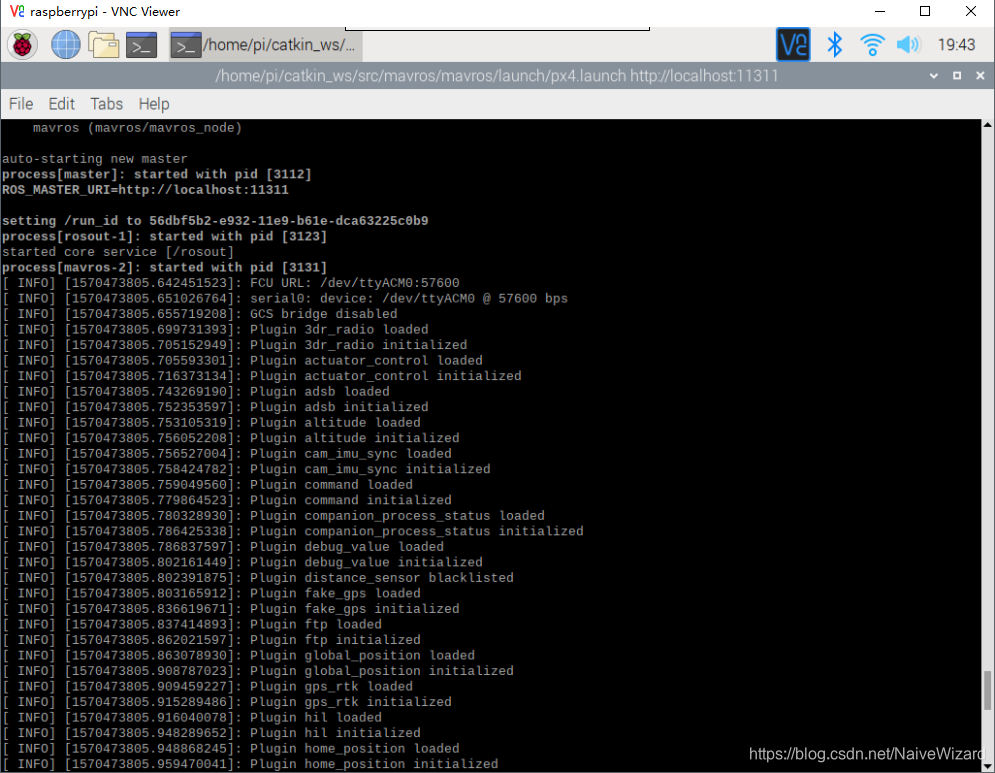
最后不连接飞控和连接飞控对比。
cd ~/catkin_ws
source devel/setup.bash
roslaunch mavros px4.launch fcu_url:=/dev/ttyACM0:57600
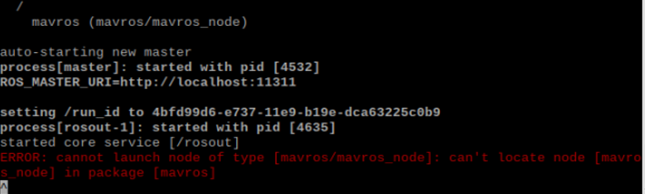
显示: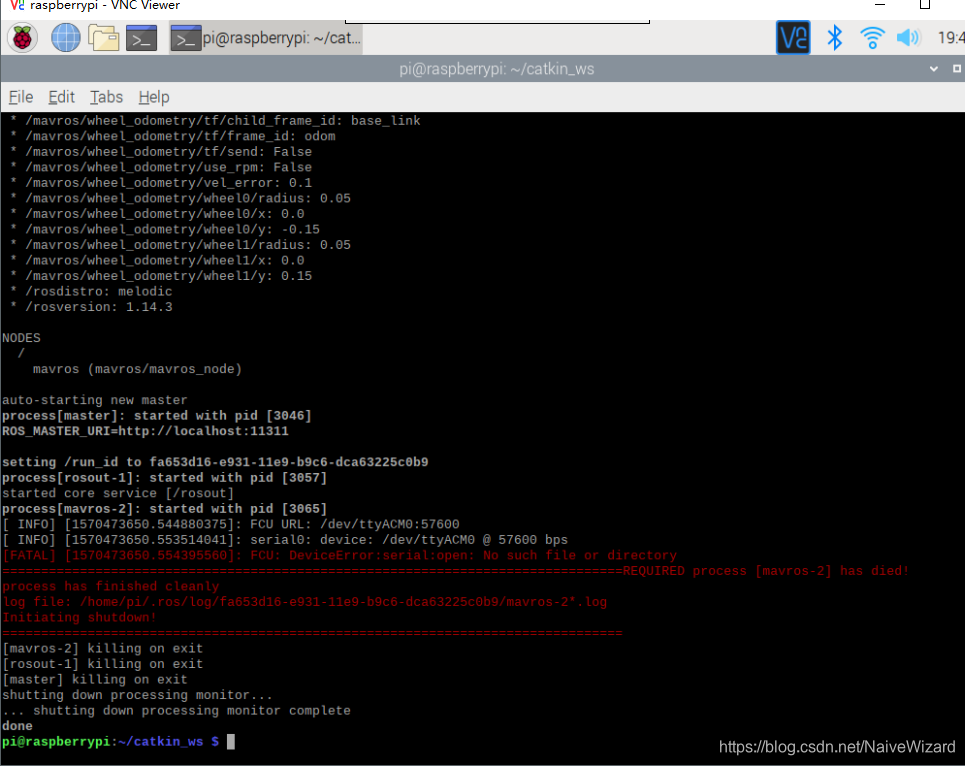
可能出现的问题:
1.catkin:command not found ,python-catkin-tools未安装
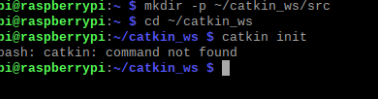
解决方式:
需要安装python-catkin-tools在终端中输入
sudo apt-get install python-catkin-tools
2.依赖包未完全安装完毕
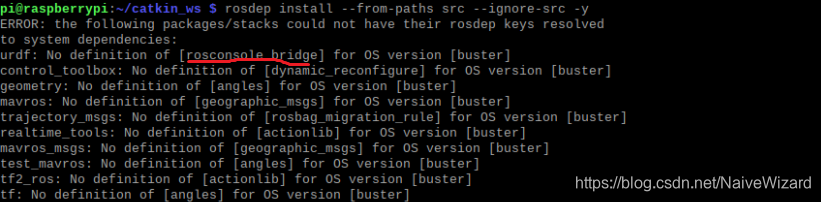
解决方式:按照系统所显示缺少的依赖包(如红线所示)进行安装。(有能力可以写脚本安装)
rosinstall_generator --rosdistro melodic $PATH | tee -a /tmp/mavros.rosinstall
部分指令如下:
rosinstall_generator --rosdistro melodic rosconsole_bridge | tee -a /tmp/mavros.rosinstall
rosinstall_generator --rosdistro melodic dynamic_reconfigure | tee -a /tmp/mavros.rosinstall
rosinstall_generator --rosdistro melodic angles | tee -a /tmp/mavros.rosinstall
rosinstall_generator --rosdistro melodic geographic_msgs | tee -a /tmp/mavros.rosinstall
rosinstall_generator --rosdistro melodic rosbag_migration_rule | tee -a /tmp/mavros.rosinstall
rosinstall_generator --rosdistro melodic actionlib | tee -a /tmp/mavros.rosinstall
rosinstall_generator --rosdistro melodic angles | tee -a /tmp/mavros.rosinstall
rosinstall_generator --rosdistro melodic actionlib | tee -a /tmp/mavros.rosinstall
wstool merge -t src /tmp/mavros.rosinstall
wstool update -t src -j4
rosdep install --from-paths src --ignore-src -y
rosinstall_generator --rosdistro melodic uuid_msgs | tee -a /tmp/mavros.rosinstall
rosinstall_generator --rosdistro melodic diagnostic_updater | tee -a /tmp/mavros.rosinstall
rosinstall_generator --rosdistro melodic control_msgs | tee -a /tmp/mavros.rosinstall
wstool merge -t src /tmp/mavros.rosinstall
wstool update -t src -j4
rosdep install --from-paths src --ignore-src -y
额外:
调整交换文件大小,主要是为了方便之后的安装,MAVROS同样需要这样的操作。如果1024还不够,可以改成4028,注意,安装完后记得修改回100.
sudo vim /etc/dphys-swapfile
# 将100改为1024
CONF_SWAPSIZE=1024
# save and exit
#开关一下,使之生效
sudo /etc/init.d/dphys-swapfile stop
sudo /etc/init.d/dphys-swapfile start
原文链接:https://blog.csdn.net/Lin_QC/article/details/88900139
我衷心希望大家不要像我一样走那么多弯路。。。














 3473
3473











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









