







#include"stdafx.h"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
#define WINDOW_NAME1 "【原始图窗口】"
#define WINDOW_NAME2 "【效果图窗口】"
Mat g_srcImage; Mat g_grayImage;
int g_nThresh = 50;
int g_maxThresh = 255;
RNG g_rng(12345);
Mat srcImage_copy = g_srcImage.clone();
Mat g_thresholdImage_output;
vector<vector<Point> > g_vContours;
vector<Vec4i> g_vHierarchy;
void on_ThreshChange(int, void*);
int main()
{
system("color 3F");
// 加载源图像
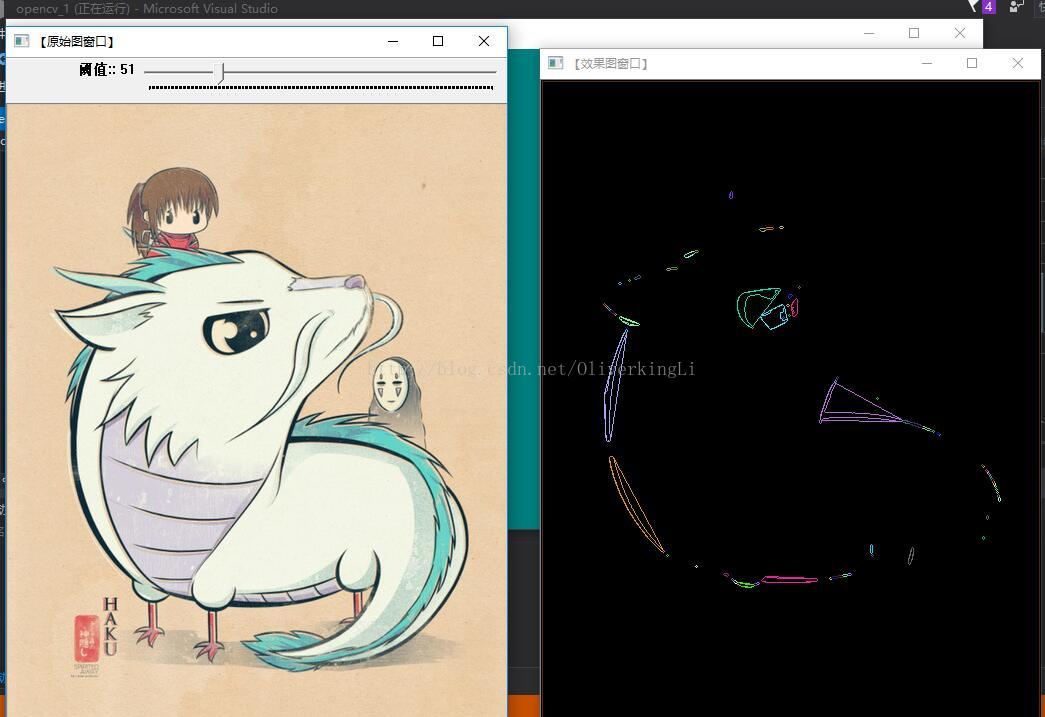
g_srcImage = imread("E:\\Skills\\opencv\\《OpenCV3编程入门》书本配套源代码\\【OpenCV2版】《OpenCV3编程入门》书本配套源代码\\【OpenCV2版】《OpenCV3编程入门》书本配套源代码\\【1】书本正篇程序源代码\\【8】第八章\\【72】寻找和绘制物体的凸包\\72_寻找和绘制物体的凸包\\1.jpg", 1);
// 将原图转换成灰度图并进行模糊降噪
cvtColor(g_srcImage, g_grayImage, CV_BGR2GRAY);
blur(g_grayImage, g_grayImage, Size(3, 3));
// 创建原图窗口并显示
namedWindow(WINDOW_NAME1, CV_WINDOW_AUTOSIZE);
imshow(WINDOW_NAME1, g_srcImage);
//创建滚动条
createTrackbar(" 阈值:", WINDOW_NAME1, &g_nThresh, g_maxThresh, on_ThreshChange);
on_ThreshChange(0, 0);//调用一次进行初始化
waitKey(0);
return(0);
}
void on_ThreshChange(int, void*)
{
// 对图像进行二值化,控制阈值
threshold(g_grayImage, g_thresholdImage_output, g_nThresh, 255, THRESH_BINARY);
// 寻找轮廓
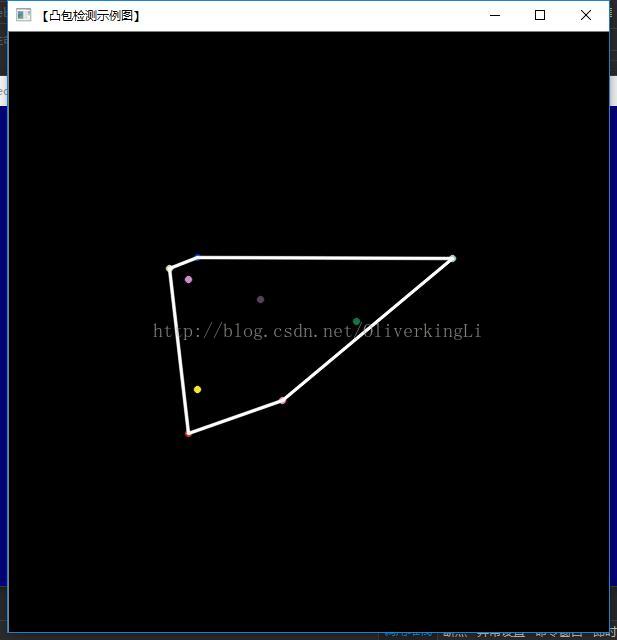
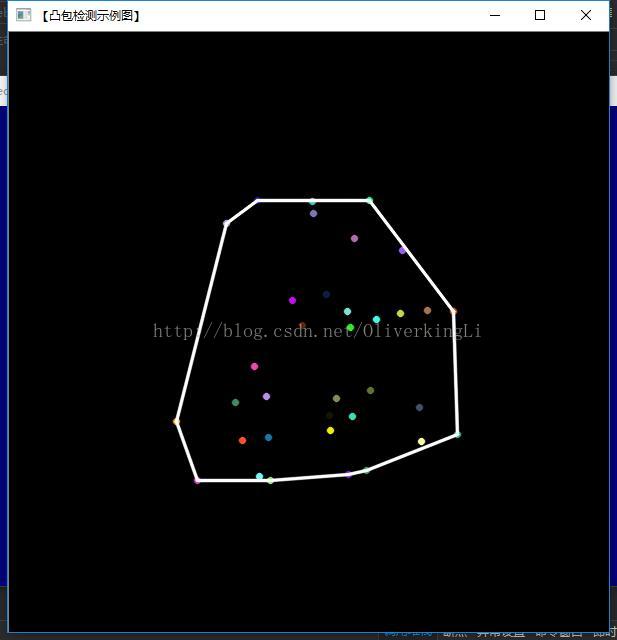
findContours(g_thresholdImage_output, g_vContours, g_vHierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
// 遍历每个轮廓,寻找其凸包
vector<vector<Point> >hull(g_vContours.size());
for (unsigned int i = 0; i < g_vContours.size(); i++)
{
convexHull(Mat(g_vContours[i]), hull[i], false);
}
// 绘出轮廓及其凸包
Mat drawing = Mat::zeros(g_thresholdImage_output.size(), CV_8UC3);
for (unsigned int i = 0; i< g_vContours.size(); i++)
{
Scalar color = Scalar(g_rng.uniform(0, 255), g_rng.uniform(0, 255), g_rng.uniform(0, 255));
drawContours(drawing, g_vContours, i, color, 1, 8, vector<Vec4i>(), 0, Point());
drawContours(drawing, hull, i, color, 1, 8, vector<Vec4i>(), 0, Point());
}
// 显示效果图
imshow(WINDOW_NAME2, drawing);
}
#include"stdafx.h"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
#define WINDOW_NAME1 "【原始图窗口】"
#define WINDOW_NAME2 "【效果图窗口】"
Mat g_srcImage; Mat g_grayImage;
int g_nThresh = 50;
int g_maxThresh = 255;
RNG g_rng(12345);
Mat srcImage_copy = g_srcImage.clone();
Mat g_thresholdImage_output;
vector<vector<Point> > g_vContours;
vector<Vec4i> g_vHierarchy;
void on_ThreshChange(int, void*);
int main()
{
system("color 3F");
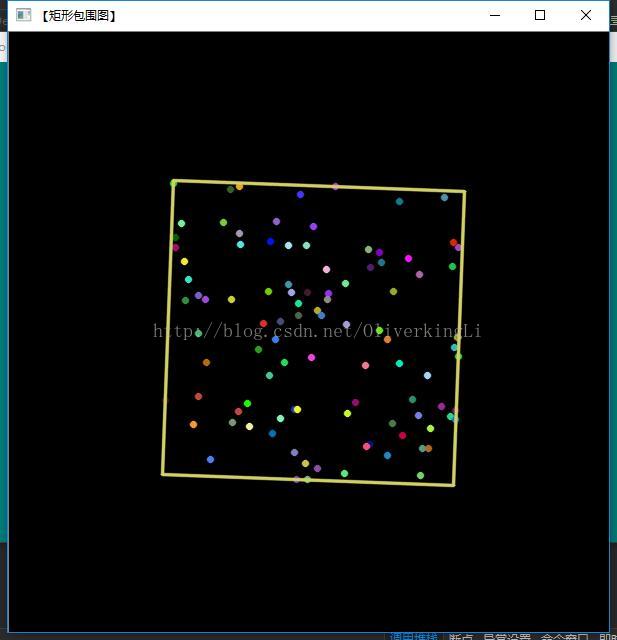
//初始化参数
Mat image(600, 600, CV_8UC3);
RNG& rng = theRNG();
while (1) {
//初始化参数
int count = rng.uniform(3, 103);
vector<Point> points;
//随机生成点坐标
for (int i = 0;i < count;i++) {
Point point;
point.x = rng.uniform(image.cols / 4, image.cols * 3 / 4);
point.y = rng.uniform(image.rows / 4, image.rows * 3 / 4);
points.push_back(point);
}
//给定2D点集,寻找最小面积包围矩形
RotatedRect box = minAreaRect(Mat(points));
Point2f vertex[4];
box.points(vertex);
//绘制出随机的点
image = Scalar::all(0);
for (int i = 0;i < count;i++) {
circle(image, points[i], 3, Scalar(rng.uniform(0, 255),
rng.uniform(0, 255), rng.uniform(0, 255)), FILLED, LINE_AA);
}
//绘制最小面积的包围矩形
for (int i = 0;i < 4;i++) {
line(image, vertex[i], vertex[(i + 1) % 4], Scalar(100, 210, 210), 2, LINE_AA);
}
imshow("【矩形包围图】", image);
if ((char)waitKey(0) == 'q')break;
}
return(0);
}

#include"stdafx.h"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
#define WINDOW_NAME1 "【原始图窗口】"
#define WINDOW_NAME2 "【效果图窗口】"
Mat g_srcImage; Mat g_grayImage;
int g_nThresh = 50;
int g_maxThresh = 255;
RNG g_rng(12345);
Mat srcImage_copy = g_srcImage.clone();
Mat g_thresholdImage_output;
vector<vector<Point> > g_vContours;
vector<Vec4i> g_vHierarchy;
void on_ThreshChange(int, void*);
int main()
{
system("color 3F");
//初始化参数
Mat image(600, 600, CV_8UC3);
RNG& rng = theRNG();
while (1) {
//初始化参数
int count = rng.uniform(3, 103);
vector<Point> points;
//随机生成点坐标
for (int i = 0;i < count;i++) {
Point point;
point.x = rng.uniform(image.cols / 4, image.cols * 3 / 4);
point.y = rng.uniform(image.rows / 4, image.rows * 3 / 4);
points.push_back(point);
}
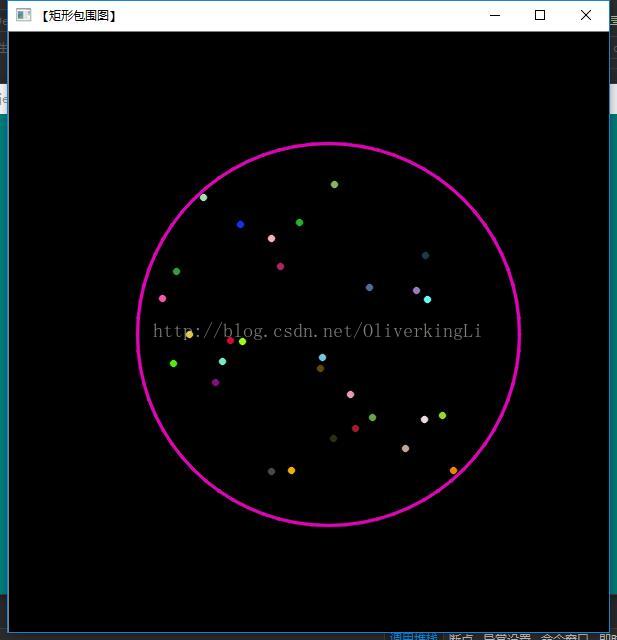
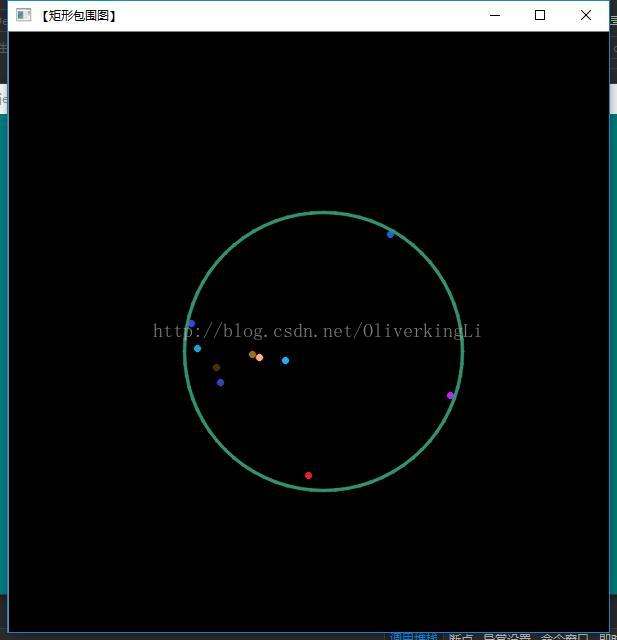
//给定2D点集,寻找最小面积包围圆
Point2f center;
float radius = 0;
minEnclosingCircle(Mat(points), center, radius);
//绘制出随机的点
image = Scalar::all(0);
for (int i = 0;i < count;i++) {
circle(image, points[i], 3, Scalar(rng.uniform(0, 255),
rng.uniform(0, 255), rng.uniform(0, 255)), FILLED, LINE_AA);
}
//绘制最小面积的包围矩形
circle(image, center, cvRound(radius), Scalar(rng.uniform(0, 255),
rng.uniform(0, 255), rng.uniform(0, 255)), 2, LINE_AA);
imshow("【矩形包围图】", image);
if ((char)waitKey(0) == 'q')break;
}
return(0);
}














 3402
3402











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









