







在明媚的夏日午后,一场别开生面的课程即将拉开序幕——为了让学生们更好地理解“20th Century Styles and Trends”(20世纪的风格与流行趋势)这门课程的知识,广州莱佛士设计学院的Patty老师带领学生们踏入了广东省丝绸博物馆的殿堂,开启了一场关于岭南文化、海上丝绸之路以及丝绸艺术领域的深度探索之旅。

步入博物馆,一股融合了古典韵味与现代气息的氛围扑面而来。Patty老师边解说,边引领学生们参观各个展厅,其中“海上丝绸之路”展区尤为耀眼。
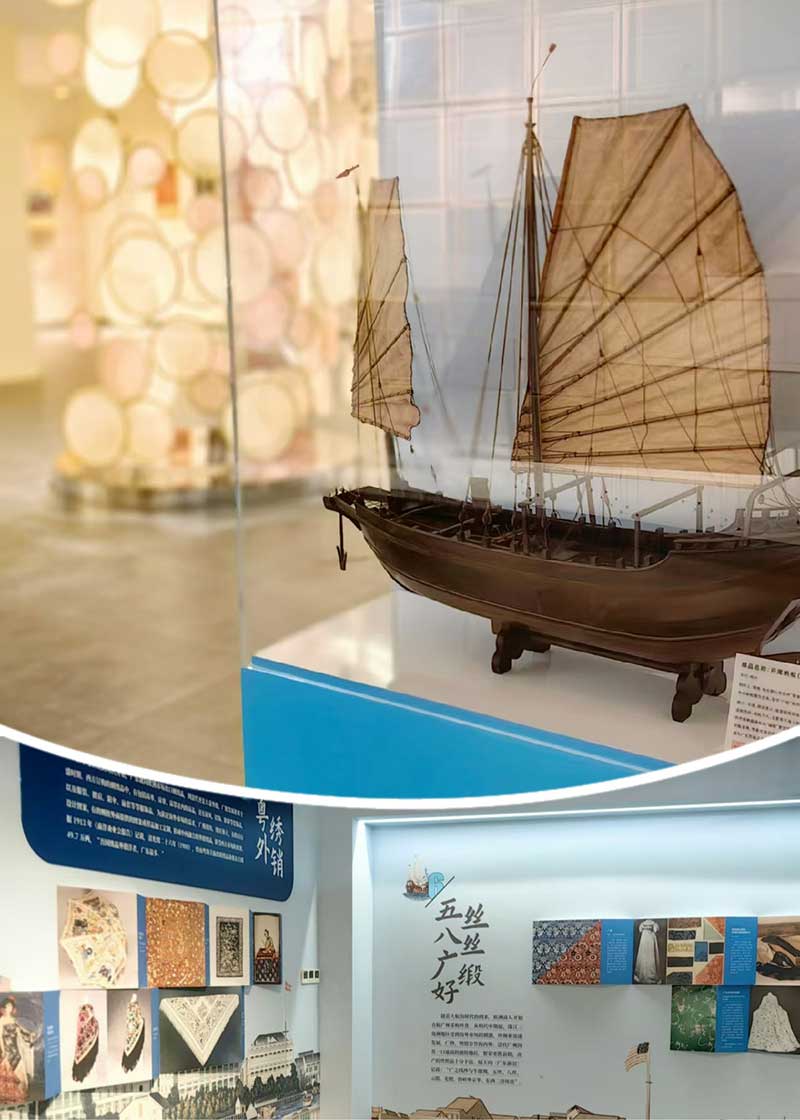
丝绸,作为中国的瑰宝,通过这条路线传遍了世界各地,许多西方设计师的作品中,都或多或少地融入了东方元素,这就是丝绸艺术跨越时空的魅力所在。

随着Patty老师深入的讲解,学生们开始尝试着从艺术的角度去分析每个时期流行的趋势和风格特点。

香云纱展区更是以其独特的魅力吸引了大家的目光,作为广东地区的特色瑰宝,香云纱以其独特的“三蒸九煮十八晒”制作工艺和优雅的质感闻名遐迩,素有“一两黄金一两纱”的美誉。

在这里,学生们深入了解了香云纱的历史渊源、制作工艺等,并对其独特的美学价值与艺术魅力有了更为深刻的认识与感悟。

此外,博物馆还展示了品类繁多的丝绸珍品,其中包括技艺精湛的缂丝作品。缂丝以其复杂的织造工艺、精细的图案设计及独特的艺术表现力令人叹为观止,被誉为中国传统手工艺中的瑰宝与巅峰之作。

学生们通过此次参观博物馆,可以更加直观地感受到历史的厚重与文化的深邃,同时对岭南文化和丝绸艺术有了全面和深入的了解,从而激化他们设计的灵感。
· 以上部分图片为莱佛士学生本人,未经允许请勿转载!















 355
355

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









