




 本文介绍了Automotive雷达中不同波形如CW、FMCW、SFCW、OFDM和FSK的特点及应用。CW雷达适用于速度测量,FMCW则因其高分辨率在车载雷达中广泛应用,而OFDM则用于车对车通信。波形选择直接影响雷达性能,如距离、速度和角度分辨率等。同时,文章提到了混合波形能提高性能并减少假目标问题。
本文介绍了Automotive雷达中不同波形如CW、FMCW、SFCW、OFDM和FSK的特点及应用。CW雷达适用于速度测量,FMCW则因其高分辨率在车载雷达中广泛应用,而OFDM则用于车对车通信。波形选择直接影响雷达性能,如距离、速度和角度分辨率等。同时,文章提到了混合波形能提高性能并减少假目标问题。
在讲雷达波形之前,我们已经对automotive radar中的三个基本估计:距离,速度和方位先后进行了介绍。
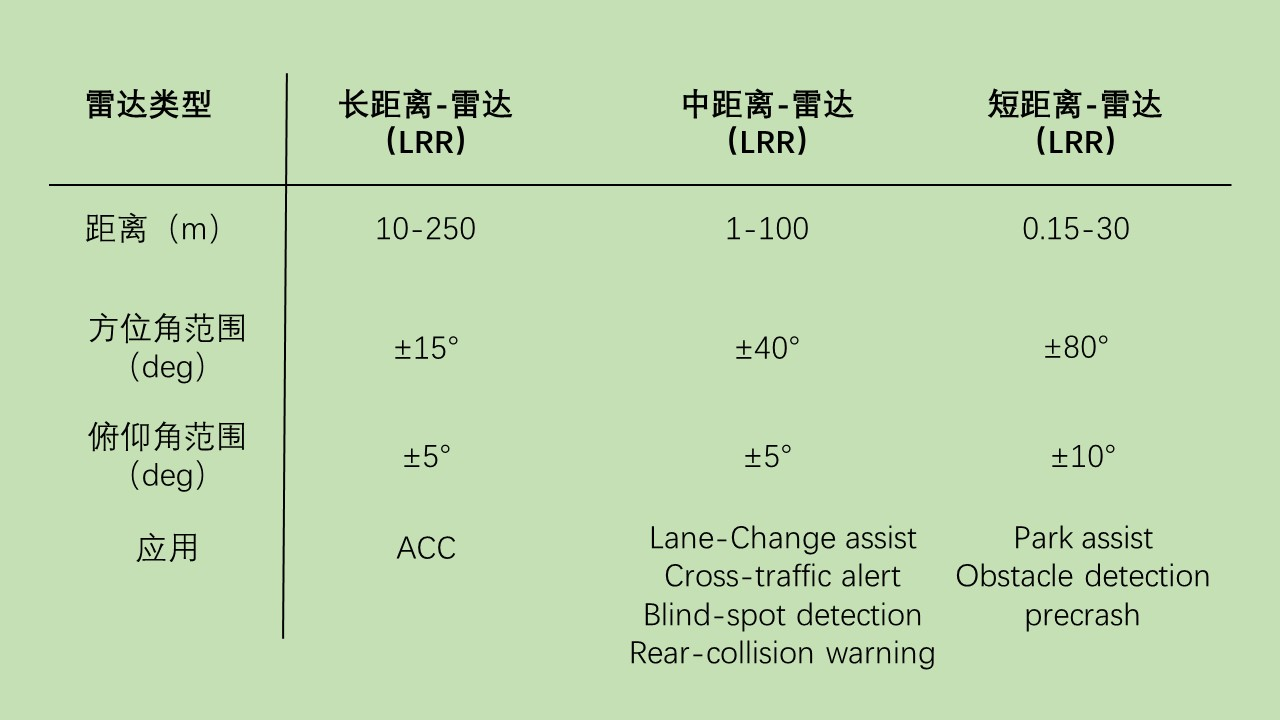
下面给出了一些常见的雷达波形,这些波形各自具有不同的雷达性能指标,比如距离分辨率,速度分辨率,角度分辨率,SNR,探测到目标的概率等等。而雷达波形的选择则直接影响到这些指标的实现。每种波形有分别具有不同的特点。所以,在实际中的应用中,无论是CW,FMCW,SFCW(步进频),OFDM(正交频分复用),还是FSK(频移键控),都需要按照实际的需求再根据各种波形的特点进行选择最适合的。
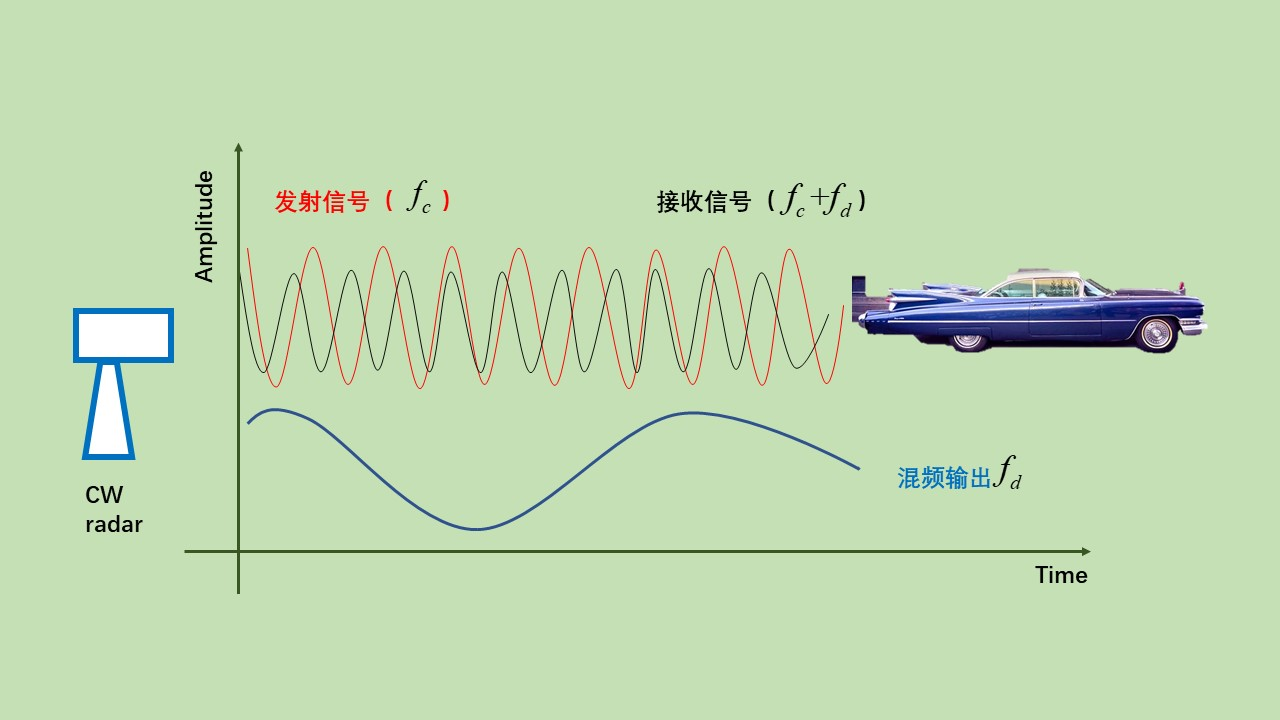
- 在CW雷达中,对接收信号与发射信号的混频可以得到目标的多普勒频率。其频率分辨率与采样时间成反比。但是由于是连续波,不能测得发射信号的来回时间,这一点对于估计目标的距离是十分重要的。因此,CW雷达不能进行距离测量,只能实现对目标的速度测量。
-
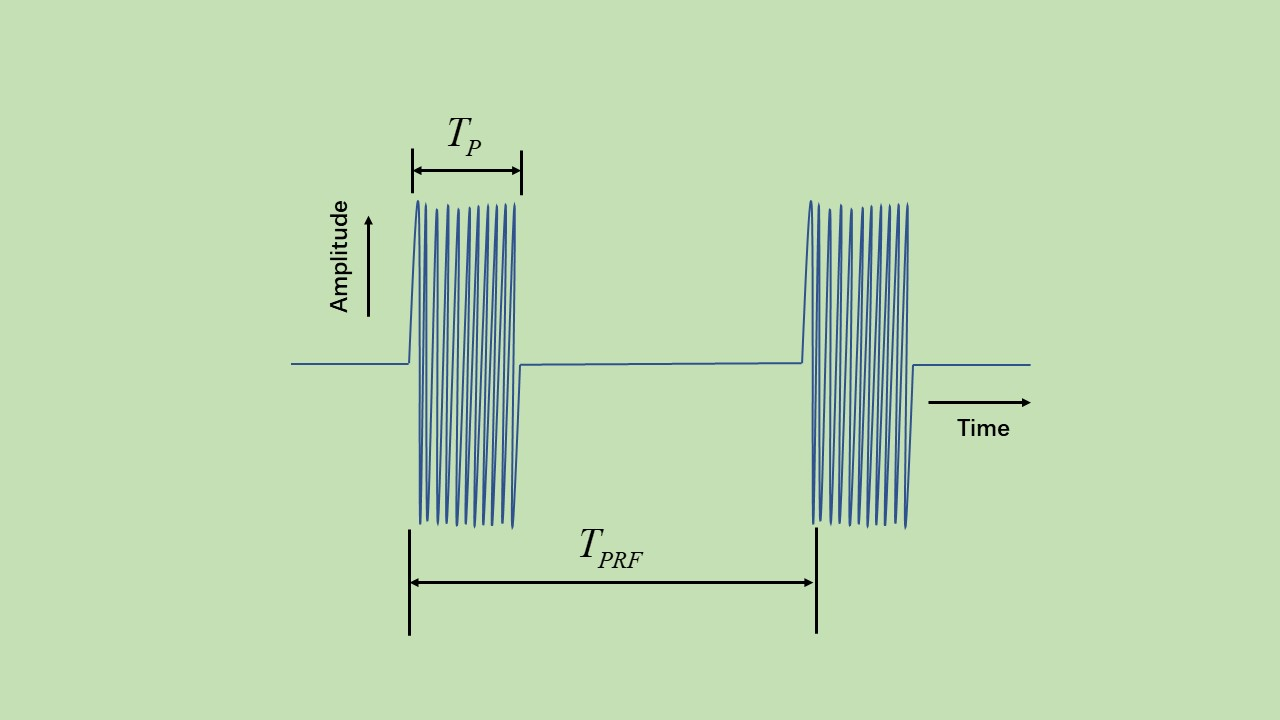
脉冲连续波雷达(Plused CW)可以根据“Automotive radar信号处理 第1课 距离估计”中提到的方法进行获得目标的距离信息。可以通过增加脉冲的长度,对比接收回波与发射信号中不同频率,得到目标的速度信息。因此,脉冲持续时间与脉冲重复间隔是得到期望的距离和速度分辨率的关键。
-
FMCW,也称线性调频(LFM)或Chirp,常被用作同步距离与速度估计,其中关于速度估计的具体原理详见“Au
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8232
8232

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









