







FROM: http://blog.csdn.net/mailang2008/article/details/5873883
对OpenCV中涉及的三种立体匹配算法进行代码及各自优缺点总结:
首先我们看一下BM算法:
该算法代码:
- CvStereoBMState *BMState = cvCreateStereoBMState();
- int SADWindowSize=15;
- BMState->SADWindowSize = SADWindowSize > 0 ? SADWindowSize : 9;
- BMState->minDisparity = 0;
- BMState->numberOfDisparities = 32;
- BMState->textureThreshold = 10;
- BMState->uniquenessRatio = 15;
- BMState->speckleWindowSize = 100;
- BMState->speckleRange = 32;
- BMState->disp12MaxDiff = 1;
- cvFindStereoCorrespondenceBM( left, right, left_disp_,BMState);
- cvNormalize( left_disp_, left_vdisp, 0, 256, CV_MINMAX );
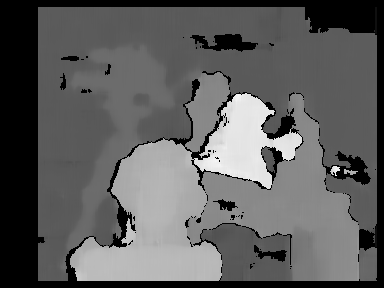
其中minDisparity是控制匹配搜索的第一个参数,代表了匹配搜苏从哪里开始,numberOfDisparities表示最大搜索视差数uniquenessRatio表示匹配功能函数,这三个参数比较重要,可以根据实验给予参数值。
该方法速度最快,一副320*240的灰度图匹配时间为31ms,视差图如下。
第二种方法是SGBM方法这是OpenCV的一种新算法:
- cv::StereoSGBM sgbm;
- sgbm.preFilterCap = 63;
- int SADWindowSize=11;
- int cn = 1;
- sgbm.SADWindowSize = SADWindowSize > 0 ? SADWindowSize : 3;
- sgbm.P1 = 4*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
- sgbm.P2 = 32*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
- sgbm.minDisparity = 0;
- sgbm.numberOfDisparities = 32;
- sgbm.uniquenessRatio = 10;
- sgbm.speckleWindowSize = 100;
- sgbm.speckleRange = 32;
- sgbm.disp12MaxDiff = 1;
- sgbm(left , right , left_disp_);
- sgbm(right, left , right_disp_);
各参数设置如BM方法,速度比较快,320*240的灰度图匹配时间为78ms,视差效果如下图。

第三种为GC方法:
- CvStereoGCState* state = cvCreateStereoGCState( 16, 2 );
- left_disp_ =cvCreateMat( left->height,left->width, CV_32F );
- right_disp_ =cvCreateMat( right->height,right->width,CV_32F );
- cvFindStereoCorrespondenceGC( left, right, left_disp_, right_disp_, state, 0 );
- cvReleaseStereoGCState( &state );
该方法速度超慢,但效果超好。

各方法理论可以参考文献。














 4046
4046











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









