




参考资料:《机器人学导论》John.J.Craig
彻底搞懂“旋转矩阵/欧拉角/四元数”,让你体会三维旋转之美_欧拉角判断动作-CSDN博客
机器人操作的定义是指通过某种机构使零件和工具在空间运动。因此,对于坐标系的定义显得尤为重要,相对于什么坐标系是描述位姿的基础。
位姿描述,描述的是位置和姿态。比如对于一个操作臂,我们除了要知道它处于什么位置之外,它的姿态也尤为重要。自然地,我们会研究如何用数学方法去表示和计算这些参量。
为了描述位置,我们需要先固定参考系,任一坐标系都能用作描述物体位姿的参考系,我们经常在不同的参考系中变换表示物体空间位姿的形式。
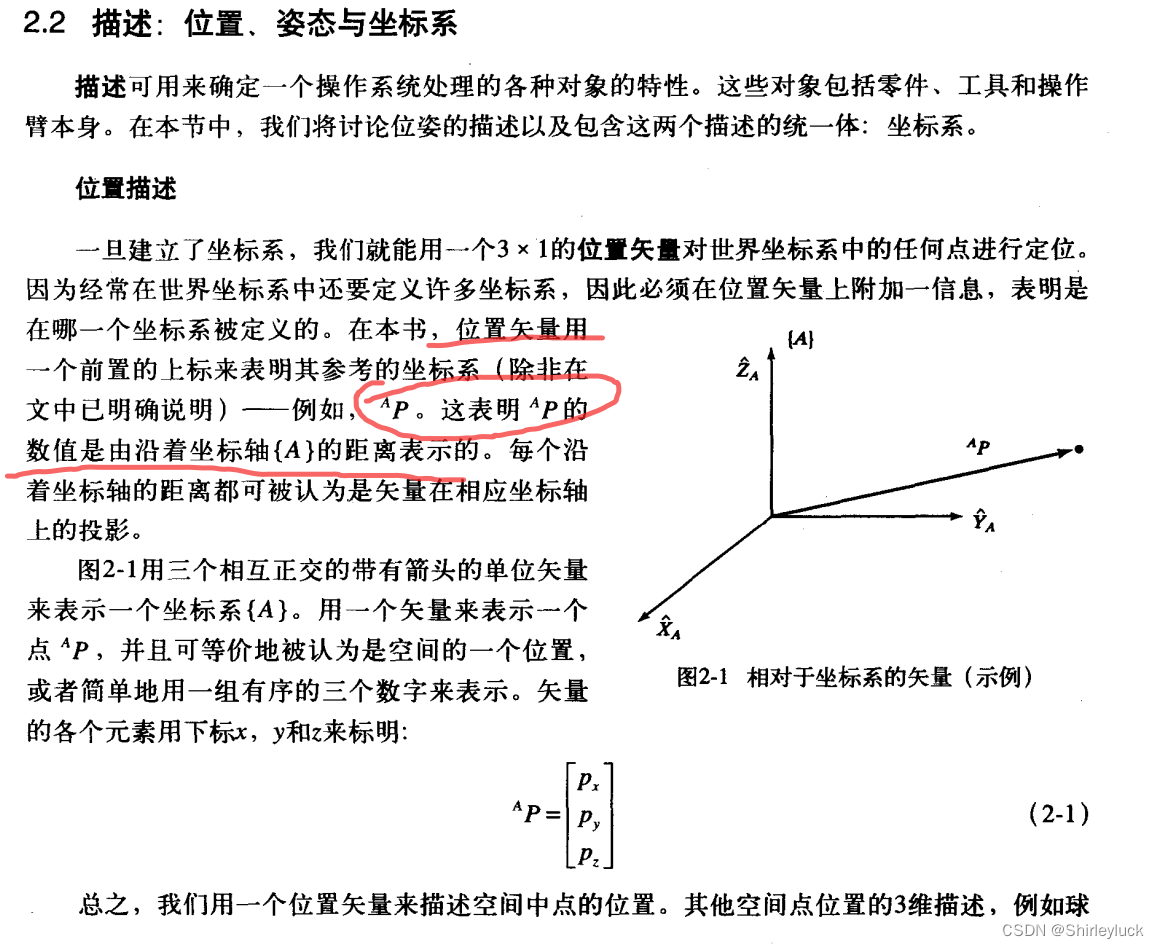
1.位置描述
位置矢量,左上角标注参考系
2.姿态描述
旋转矩阵表示姿态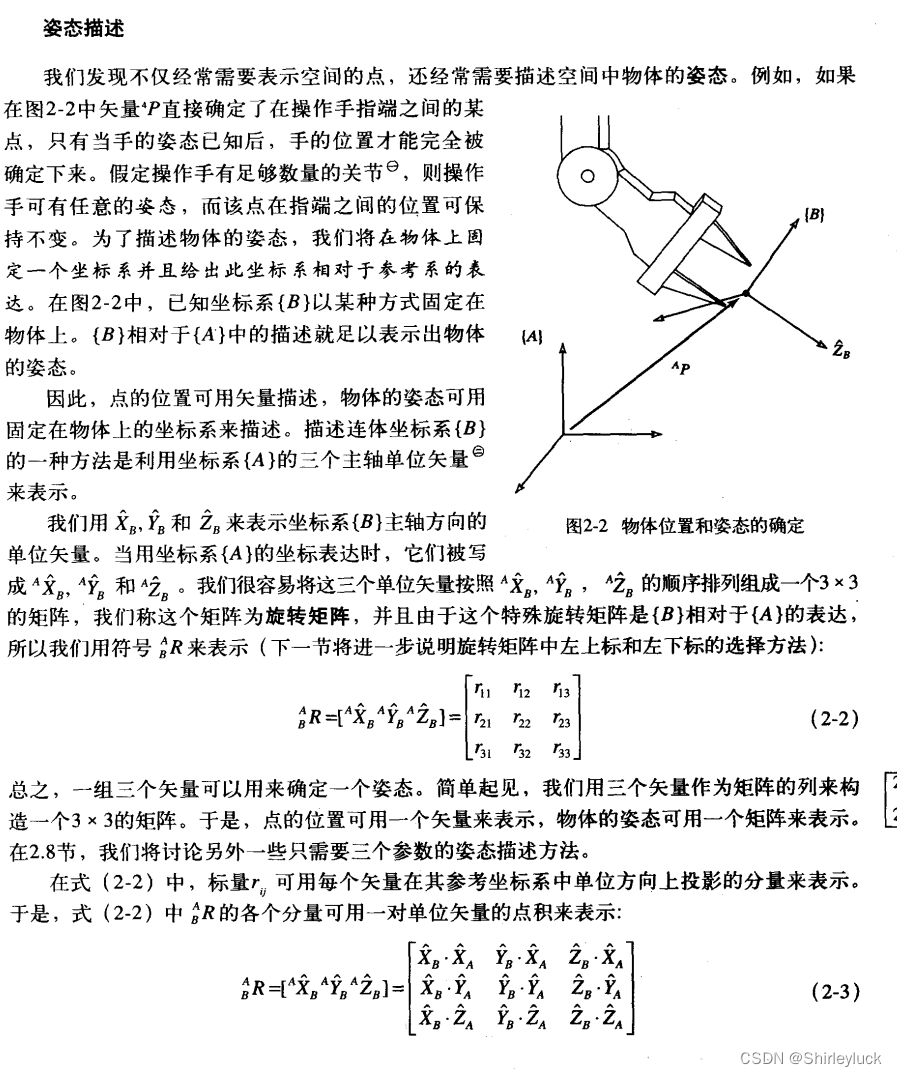
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









