



随着城市化进程的加速,越来越多的人涌入城区,成为现代都市的打工人。高楼大厦成为人们日常生活的背景,然而,高空抛物这一“悬在城市上空的痛”也日益成为威胁人们生命财产安全的重大隐患。近年来,高空抛物致人伤亡的事件屡见不鲜,给无数家庭带来了巨大的痛苦,也让整个社会对这一问题的关注度不断提升。
尽管现代立法和社区监督等手段在一定程度上对高空抛物行为进行了约束,但意外情况仍然难以完全避免。传统的监管模式主要依赖于事前宣传引导和事后摸排线索锁定抛物者,这种模式存在明显的局限性。一方面,事前宣传虽然能够起到一定的教育作用,但难以从根本上杜绝高空抛物行为的发生;另一方面,事后摸排线索不仅耗时费力,而且往往难以在第一时间找到抛物者,导致受害者无法及时获得应有的赔偿和公正。更重要的是,这种模式无法在危险发生之前及时预警,无法有效保护行人的安全。
然而,随着AI智能化技术的普及和发展,越来越多的行业开始引入智能化技术,赋能生产发展新质生产力。在社区安全管理领域,智能化技术的应用也为解决高空抛物问题带来了新的希望。现代社区大多配备了360度全方位无死角的摄像头,这些摄像头如同社区的“眼睛”,时刻守护着居民的安全。借助这些无处不在的“鹰眼”,社区可以实现对高空抛物行为的实时监测和预警。
具体来说,社区可以通过向上仰角拍摄的摄像头实时采集图像数据,对这些图像进行标注,识别出异常落物的特征。在此基础上,开发构建智能化的检测识别预警模型,并将其部署在摄像头端侧。当摄像头接入实时视频流数据时,模型能够进行实时计算分析,一旦发现画面中出现异常落物,立即播放预警音频提醒路人注意躲避。这种智能化的预警系统能够在灾难性事故发生之前起到有效的干预作用,尽最大可能挽回损失,保护行人的生命安全。
除了实时预警功能外,智能化系统还可以对社区不同楼层的抛物情况进行累积统计分析。随着时间的推移,系统能够生成详细的报告,将抛物情况的数据反馈给社区管理员。这些数据为社区管理员提供了有力的决策支持,使他们能够根据实际情况进行事前针对性的宣传督导管理。例如,如果某个楼层频繁出现高空抛物行为,社区管理员可以对该楼层的居民进行重点宣传和教育,提醒他们遵守相关规定,减少危险抛物行为的发生。
本文正是在这样的思考背景下,想要探索尝试从实验性质的角度出发开发构建智能化的检测识别系统,在前面的系列博文中我们已经进行了很多相关的开发实践工作,感兴趣的话可以自行移步阅读即可:
《AI预警高空抛物守护城市上空的安宁,基于YOLOv5全系列【n/s/m/l/x】参数模型开发构建公共生活场景中高空抛物智能化检测识别预警系统》
本文主要是想要基于YOLOv7系列的模型来进行相应的开发实践,首先看下实例效果:
接下来看下实例数据:
YOLOv7是 YOLO 系列最新推出的YOLO 结构,在 5 帧/秒到 160 帧/秒范围内,其速度和精度都超过了大部分已知的目标检测器,在 GPU V100 已知的 30 帧/秒以上的实时目标检测器中,YOLOv7 的准确率最高。根据代码运行环境的不同(边缘 GPU、普通 GPU 和云 GPU),YOLOv7 设置了三种基本模型,分别称为 YOLOv7-tiny、YOLOv7和 YOLOv7-W6。相比于 YOLO 系列其他网络 模 型 ,YOLOv7 的 检 测 思 路 与YOLOv4、YOLOv5相似,YOLOv7 网络主要包含了 Input(输入)、Backbone(骨干网络)、Neck(颈部)、Head(头部)这四个部分。首先,图片经过输入部分数据增强等一系列操作进行预处理后,被送入主干网,主干网部分对处理后的图片提取特征;随后,提取到的特征经过 Neck 模块特征融合处理得到大、中、小三种尺寸的特征;最终,融合后的特征被送入检测头,经过检测之后输出得到结果。
YOLOv7 网络模型的主干网部分主要由卷积、E-ELAN 模块、MPConv 模块以及SPPCSPC 模块构建而成 。在 Neck 模块,YOLOv7 与 YOLOv5 网络相同,也采用了传统的 PAFPN 结构。FPN是YoloV7的加强特征提取网络,在主干部分获得的三个有效特征层会在这一部分进行特征融合,特征融合的目的是结合不同尺度的特征信息。在FPN部分,已经获得的有效特征层被用于继续提取特征。在YoloV7里依然使用到了Panet的结构,我们不仅会对特征进行上采样实现特征融合,还会对特征再次进行下采样实现特征融合。Head检测头部分,YOLOv7 选用了表示大、中、小三种目标尺寸的 IDetect 检测头,RepConv模块在训练和推理时结构具有一定的区别。
这里主要是选择了yolov7-tiny、yolov7和yolov7x这三款不同参数量级的模型来进行开发训练,最终线上选取的是yolov7模型作为推理模型,这里给出来yolov7的模型文件:
# parameters
nc: 1 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
# anchors
anchors:
- [12,16, 19,36, 40,28] # P3/8
- [36,75, 76,55, 72,146] # P4/16
- [142,110, 192,243, 459,401] # P5/32
# yolov7 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [32, 3, 1]], # 0
[-1, 1, Conv, [64, 3, 2]], # 1-P1/2
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [128, 3, 2]], # 3-P2/4
[-1, 1, Conv, [64, 1, 1]],
[-2, 1, Conv, [64, 1, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]], # 11
[-1, 1, MP, []],
[-1, 1, Conv, [128, 1, 1]],
[-3, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 16-P3/8
[-1, 1, Conv, [128, 1, 1]],
[-2, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]], # 24
[-1, 1, MP, []],
[-1, 1, Conv, [256, 1, 1]],
[-3, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 29-P4/16
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [1024, 1, 1]], # 37
[-1, 1, MP, []],
[-1, 1, Conv, [512, 1, 1]],
[-3, 1, Conv, [512, 1, 1]],
[-1, 1, Conv, [512, 3, 2]],
[[-1, -3], 1, Concat, [1]], # 42-P5/32
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -3, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [1024, 1, 1]], # 50
]
# yolov7 head
head:
[[-1, 1, SPPCSPC, [512]], # 51
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[37, 1, Conv, [256, 1, 1]], # route backbone P4
[[-1, -2], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]], # 63
[-1, 1, Conv, [128, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[24, 1, Conv, [128, 1, 1]], # route backbone P3
[[-1, -2], 1, Concat, [1]],
[-1, 1, Conv, [128, 1, 1]],
[-2, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[-1, 1, Conv, [64, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [128, 1, 1]], # 75
[-1, 1, MP, []],
[-1, 1, Conv, [128, 1, 1]],
[-3, 1, Conv, [128, 1, 1]],
[-1, 1, Conv, [128, 3, 2]],
[[-1, -3, 63], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]],
[-2, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[-1, 1, Conv, [128, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [256, 1, 1]], # 88
[-1, 1, MP, []],
[-1, 1, Conv, [256, 1, 1]],
[-3, 1, Conv, [256, 1, 1]],
[-1, 1, Conv, [256, 3, 2]],
[[-1, -3, 51], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]],
[-2, 1, Conv, [512, 1, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[-1, 1, Conv, [256, 3, 1]],
[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],
[-1, 1, Conv, [512, 1, 1]], # 101
[75, 1, RepConv, [256, 3, 1]],
[88, 1, RepConv, [512, 3, 1]],
[101, 1, RepConv, [1024, 3, 1]],
[[102,103,104], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)
]如果对YOLOv7开发构建自己的个性化目标检测系统有疑问的可以参考前文的超详细教程:
《YOLOv7基于自己的数据集从零构建模型完整训练、推理计算超详细教程》
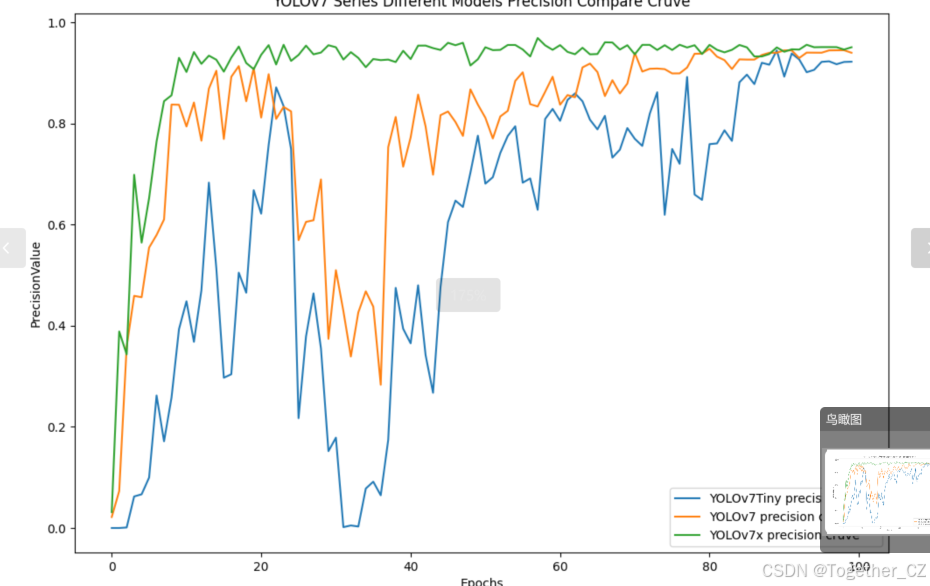
在实验阶段保持完全相同的参数设置,等待全部训练完成之后来从多个指标的维度来进行综合的对比分析。
【Precision曲线】
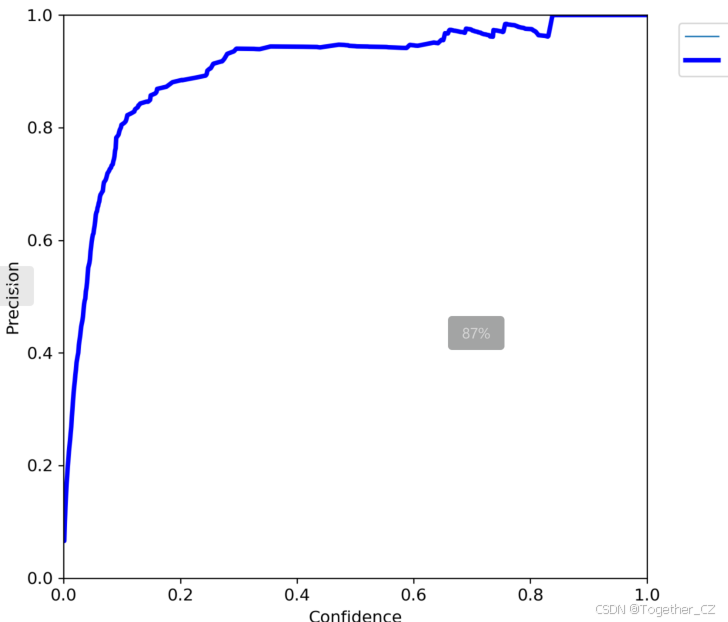
精确率曲线(Precision Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。
精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。
绘制精确率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率和召回率。
将每个阈值下的精确率和召回率绘制在同一个图表上,形成精确率曲线。
根据精确率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察精确率曲线,我们可以根据需求确定最佳的阈值,以平衡精确率和召回率。较高的精确率意味着较少的误报,而较高的召回率则表示较少的漏报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
精确率曲线通常与召回率曲线(Recall Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。
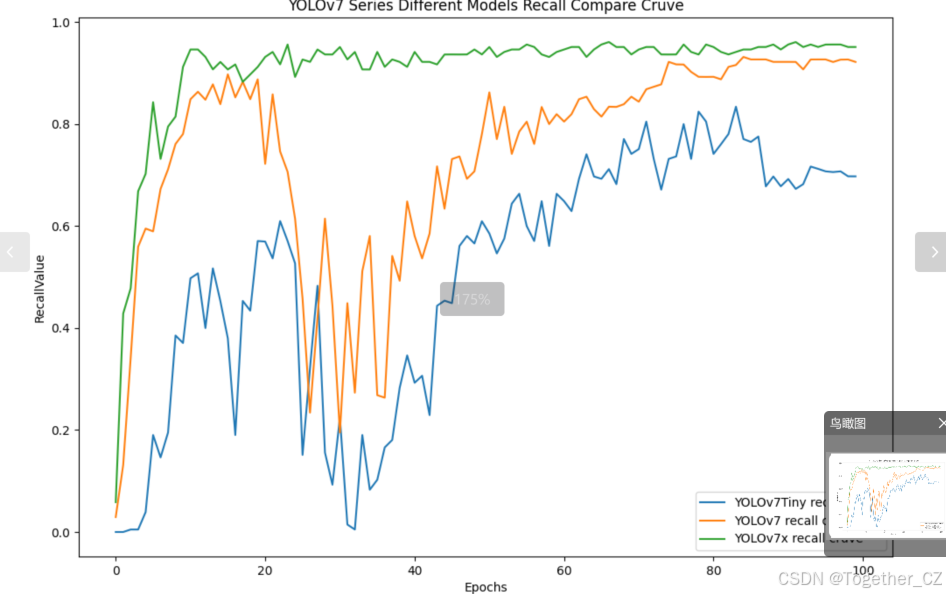
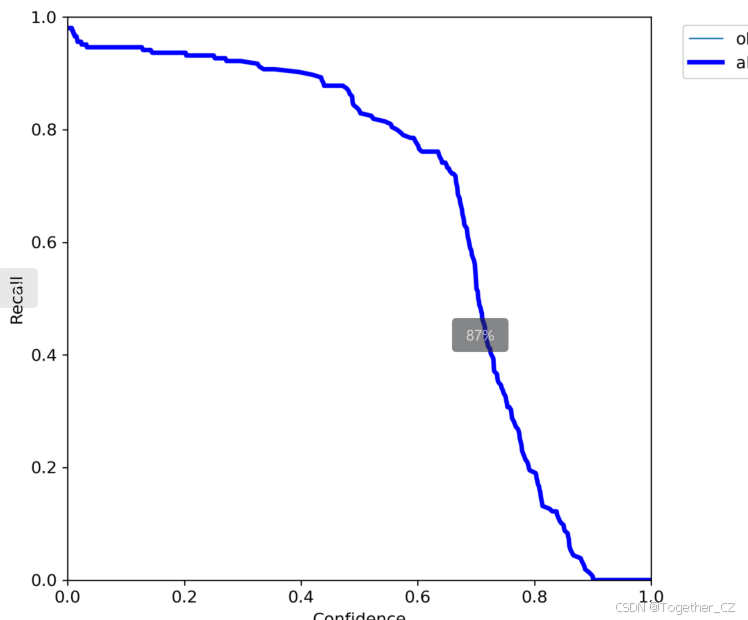
【Recall曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。
召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。
绘制召回率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的召回率和对应的精确率。
将每个阈值下的召回率和精确率绘制在同一个图表上,形成召回率曲线。
根据召回率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察召回率曲线,我们可以根据需求确定最佳的阈值,以平衡召回率和精确率。较高的召回率表示较少的漏报,而较高的精确率意味着较少的误报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
召回率曲线通常与精确率曲线(Precision Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。
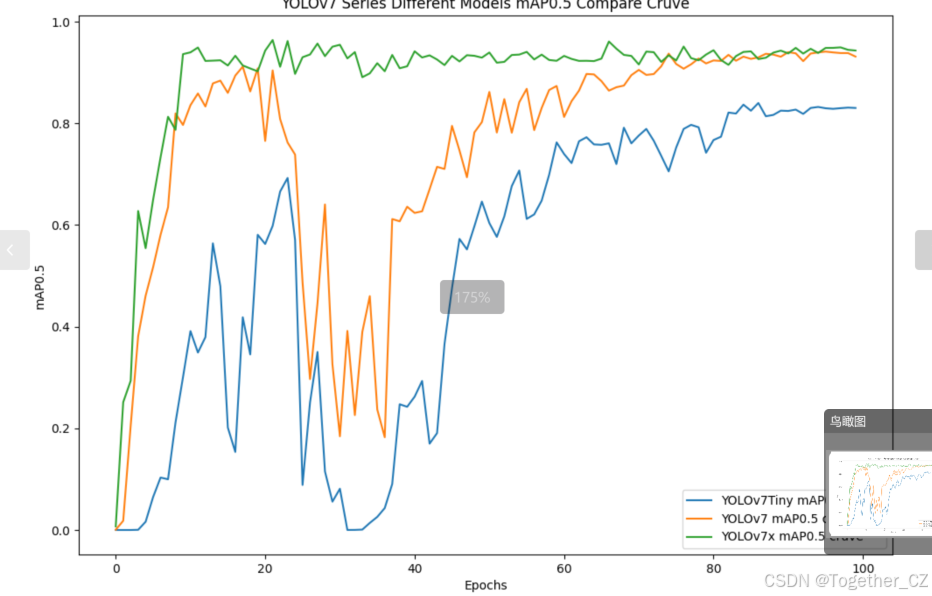
【mAP0.5】
mAP0.5,也被称为mAP@0.5或AP50,指的是当Intersection over Union(IoU)阈值为0.5时的平均精度(mean Average Precision)。IoU是一个用于衡量预测边界框与真实边界框之间重叠程度的指标,其值范围在0到1之间。当IoU值为0.5时,意味着预测框与真实框至少有50%的重叠部分。
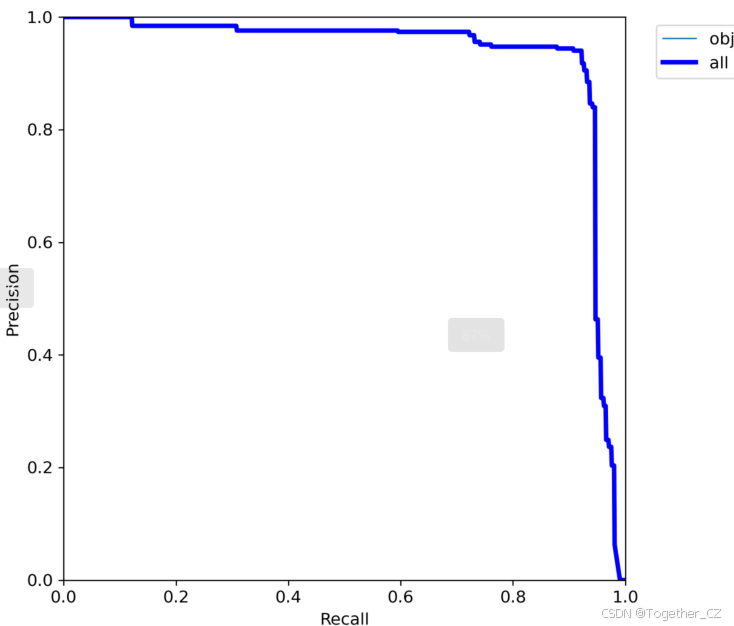
在计算mAP0.5时,首先会为每个类别计算所有图片的AP(Average Precision),然后将所有类别的AP值求平均,得到mAP0.5。AP是Precision-Recall Curve曲线下面的面积,这个面积越大,说明AP的值越大,类别的检测精度就越高。
mAP0.5主要关注模型在IoU阈值为0.5时的性能,当mAP0.5的值很高时,说明算法能够准确检测到物体的位置,并且将其与真实标注框的IoU值超过了阈值0.5。
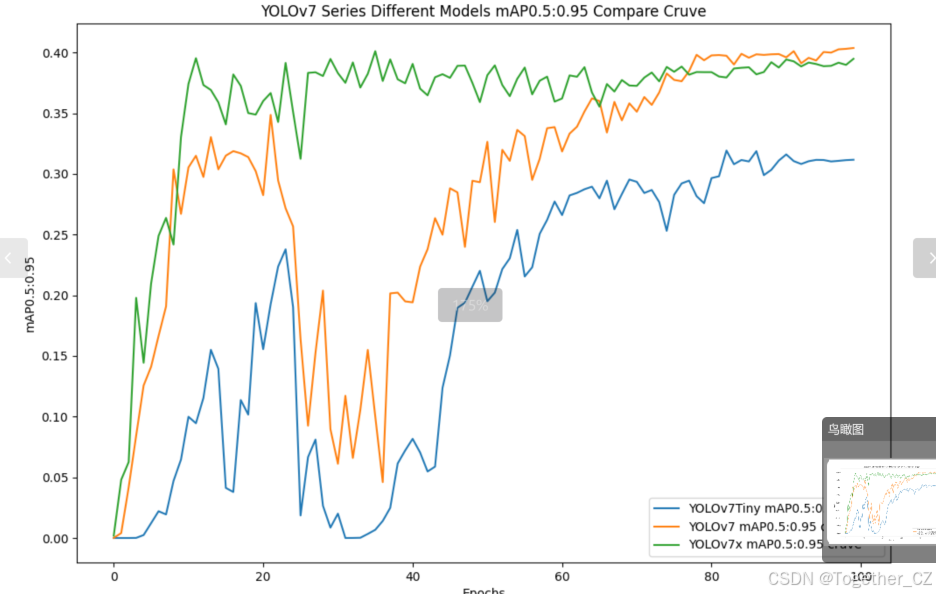
【mAP0.5:0.95】
mAP0.5:0.95,也被称为mAP@[0.5:0.95]或AP@[0.5:0.95],表示在IoU阈值从0.5到0.95变化时,取各个阈值对应的mAP的平均值。具体来说,它会在IoU阈值从0.5开始,以0.05为步长,逐步增加到0.95,并在每个阈值下计算mAP,然后将这些mAP值求平均。
这个指标考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。当mAP0.5:0.95的值很高时,说明算法在不同阈值下的检测结果均非常准确,覆盖面广,可以适应不同的场景和应用需求。
对于一些需求比较高的场合,比如安全监控等领域,需要保证高的准确率和召回率,这时mAP0.5:0.95可能更适合作为模型的评价标准。
综上所述,mAP0.5和mAP0.5:0.95都是用于评估目标检测模型性能的重要指标,但它们的关注点有所不同。mAP0.5主要关注模型在IoU阈值为0.5时的性能,而mAP0.5:0.95则考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。
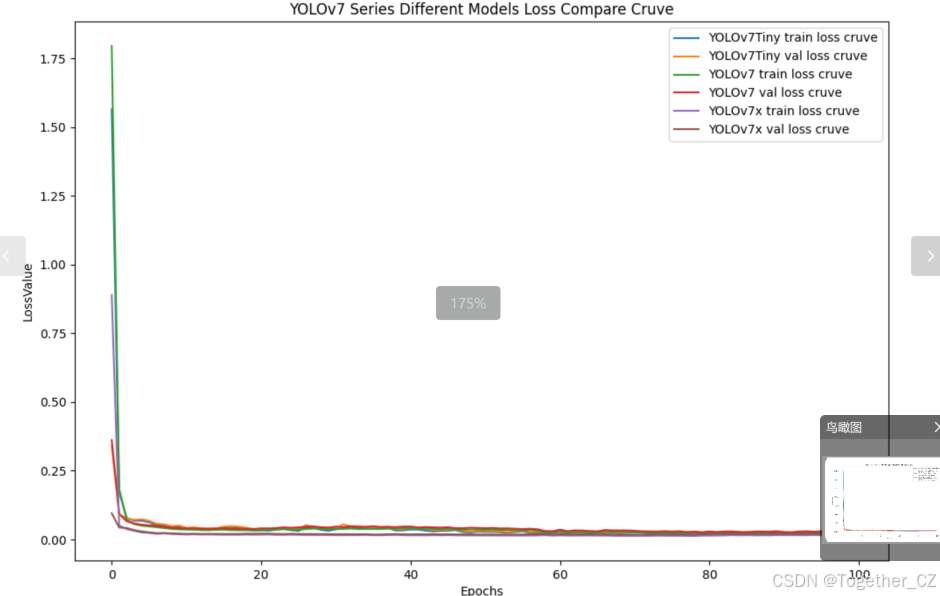
【loss曲线】
在深度学习的训练过程中,loss函数用于衡量模型预测结果与实际标签之间的差异。loss曲线则是通过记录每个epoch(或者迭代步数)的loss值,并将其以图形化的方式展现出来,以便我们更好地理解和分析模型的训练过程。
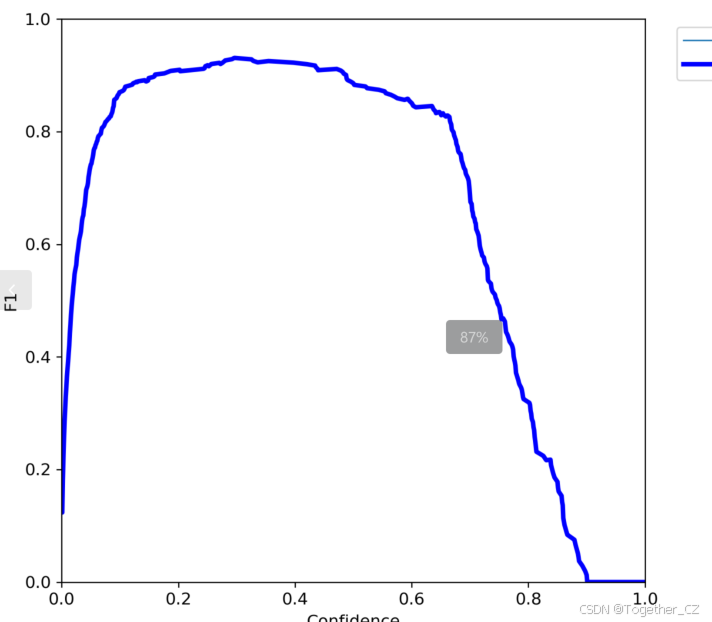
【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能。
F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
绘制F1值曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率、召回率和F1分数。
将每个阈值下的精确率、召回率和F1分数绘制在同一个图表上,形成F1值曲线。
根据F1值曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
F1值曲线通常与接收者操作特征曲线(ROC曲线)一起使用,以帮助评估和比较不同模型的性能。它们提供了更全面的分类器性能分析,可以根据具体应用场景来选择合适的模型和阈值设置。
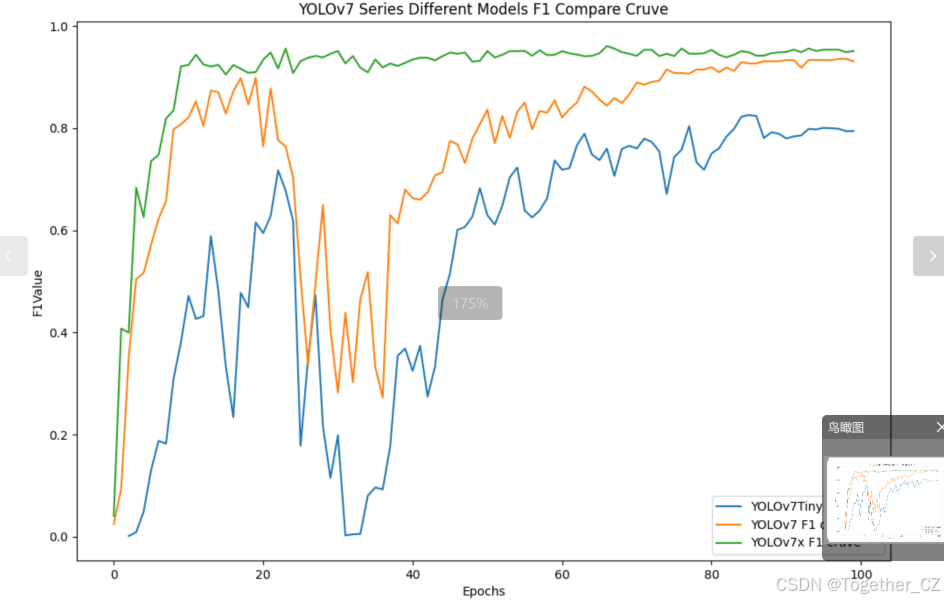
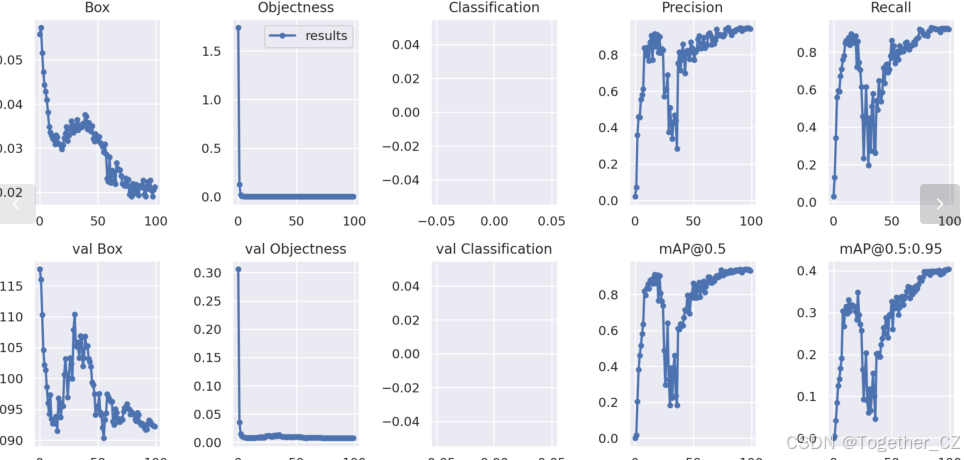
综合实验对比分析结果来看:随着实验训练迭代次数的增加,三款不同参数量级的模型都不断提升精度,最终达到了十分相近的效果,这里综合考虑最终选择使用yolov7tiny模型来作为最终的推理模型。
接下来我们详细看下yolov7tiny模型的结果详情。
【离线推理实例】

【Batch实例】

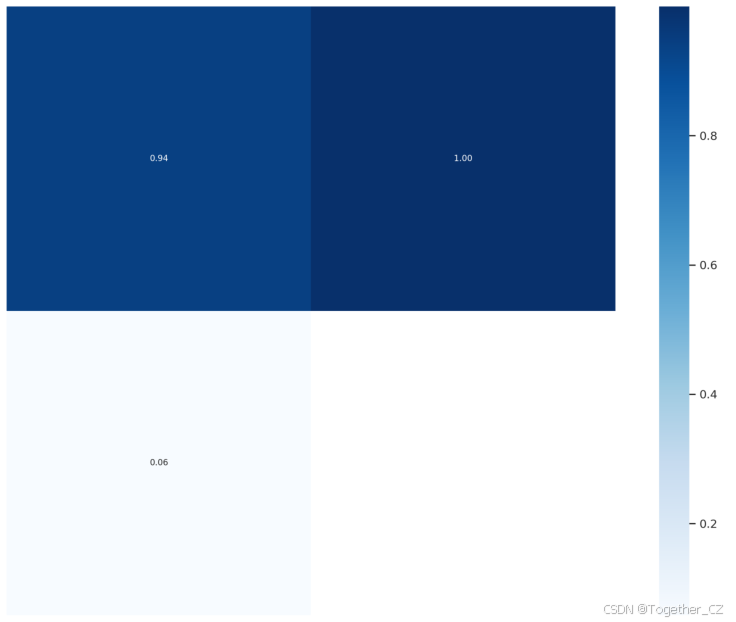
【混淆矩阵】
【F1值曲线】
【Precision曲线】
【PR曲线】
【Recall曲线】
【训练可视化】
智能化技术在社区安全管理中的应用,不仅提升了社区的安全管理水平,也为居民创造了一个更加安全、和谐的生活环境。它改变了传统的监管模式,从被动应对转向主动预防,从依赖人力转向依靠技术,大大提高了监管效率和准确性。更重要的是,它体现了对居民生命安全的高度重视和对社区公共秩序的维护。在未来,随着智能化技术的不断发展和应用,我们有理由相信,高空抛物这一城市顽疾将得到有效遏制。社区将成为一个更加安全、宜居的地方,人们可以放心地在高楼大厦下行走,不再担心头顶上的安全隐患。智能化技术不仅为社区安全赋能,更为城市的可持续发展和居民的幸福生活提供了有力保障。让我们共同期待,在智能化技术的助力下,城市上空的安宁能够得到长久的守护。




















 529
529

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











