






随着无人机的发展,大疆、飞马等企业以一种变革行业的态度迅速改变了现在测绘的作业概念,作业方法,作业效率。而机载激光雷达(LiDAR,Light Laser Detection and Ranging)主要应用于基础测绘、城市三维建模和林业应用、铁路、电力等。在过去十年,作为精确、快速地获取地面三维数据的工具已得到广泛的认同。
目前,低成本的无人机+机载激光雷达以及指数级的降低了高精度测绘成本。虽然机载LiDAR有比较成熟的商业系统,但是激光雷达数据的处理系统现今还是相对不成熟的,现在主要使用的软件除了各个硬件公司提供的软件,主要使用的是芬兰Terrasolid。Terrasolid中主要包括TerraModelerTM、TerraScanTM和TerraPhotoTM等。
而硬件厂商提供的软件当中,主要是大疆 禅思L1配套的 大疆智图 软件以及飞马的RIEGL mini210激光雷达配套的 无人机管家 专业版。
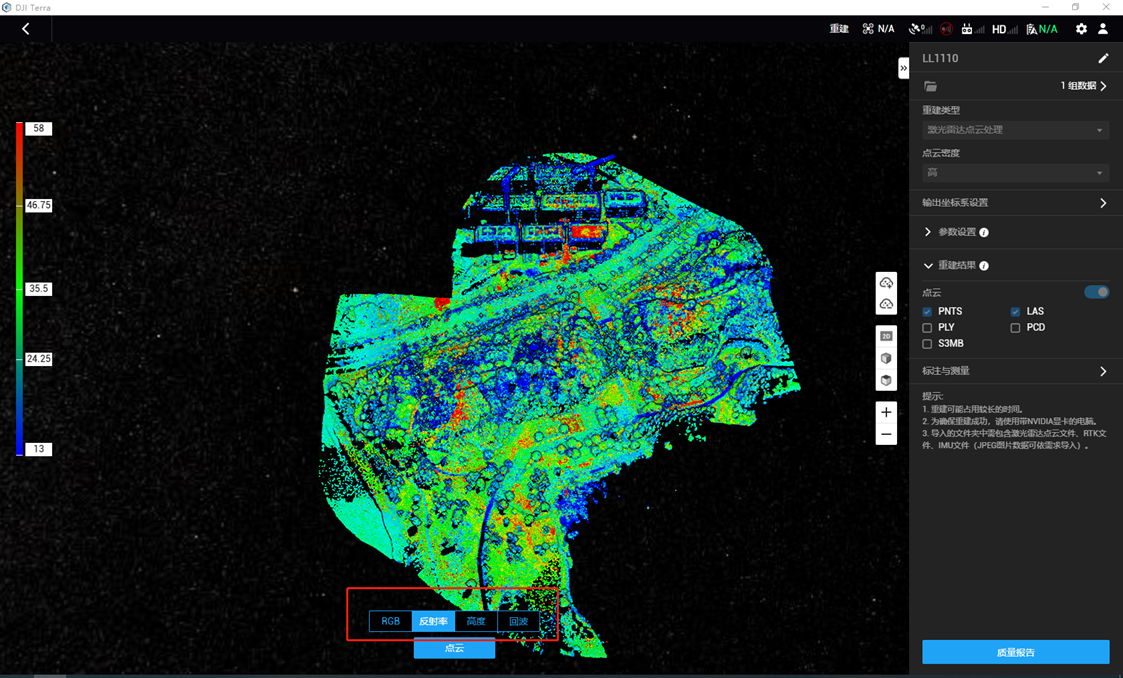
大疆智图
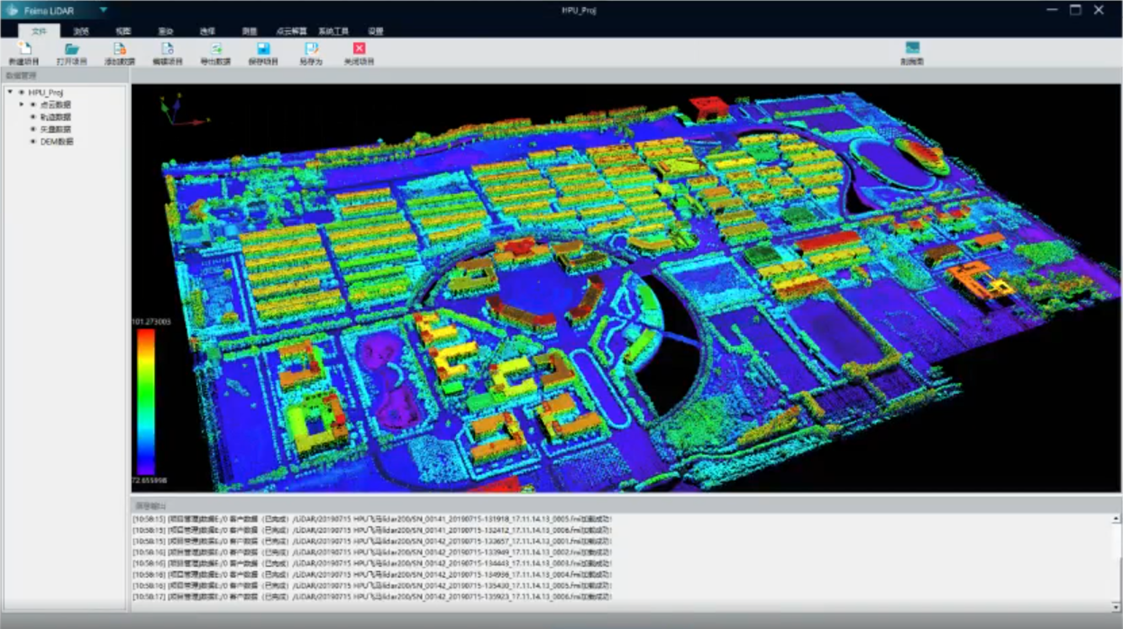
飞马-无人机管家
点云数据一般主要为.las格式。LAS 文件是激光雷达点云点的集合,每个点都有水平坐标(X 和 Y)和垂直高程 (Z) 值。除了高程值之外,LAS 文件还提供了一种通用格式来存储附加信息,例如激光强度、扫描角度、返回信息等。其中一些附加信息(例如强度)对于可视化非常有用。
而激光点云的精度,对于地形测绘的准确性起到了很大的助力。例如:采用激光点云数据制作大比例尺地形图(如1:500)
图新地球·桌面端(LocaSpace Viewer) 点云模块立即更新可用。与 图新云GIS 流行的GIS软件 图新地球·桌面端 4.3.1 版本一起发布,该最新版本包括强大的 点云大师 功能。
图新地球·桌面端 点云模块暂时是该软件的实验室插件。可提供大量点云查看、分类和提取工具。包括三维视图、点云赋色、自动地面点检测和分类和点大小控制;地形表面生成,以及更多。

一、点云数据可视化
图新地球产品技术交流及行业应用解决方案咨询 | 添加图新云gis薇信(tuxinyungis)欢迎咨询~
要查看 点云 的软件有很多,例如:图新地球·桌面端 或 Global Mapper。还有一些常用的专业显示工具,比如CloudCompareStereo、MeshLab、Geomagic Foundation 2015等。
优点和缺点
每种类型的可视化都有优点和缺点。在点云中比在 TIN 中更好地表示桥梁和树冠等特征。在 TIN 可视化中,桥梁往往会形成人工水坝,而树木往往会形成圆锥体,这两者都不能反映现实。点云可视化的另一个优势是这些产品需要较少的处理和质量控制。如果您查看TIN,您会看到在创建 TIN 时引入的道路中断。LAS 点云中不存在这种道路中断。点云可视化确实有它的缺点。例如,如果您仔细观察,您会发现点云在厚厚的树冠下和水体上方有很多数据空白。这些空白是由于这些区域缺乏激光雷达回波。不幸的是,没有办法在点云中插入和填充
这些数据空白。出于这个原因,我更喜欢只使用高分辨率点云。
今天我们以 图新地球·桌面端 来讲解点云可视化。
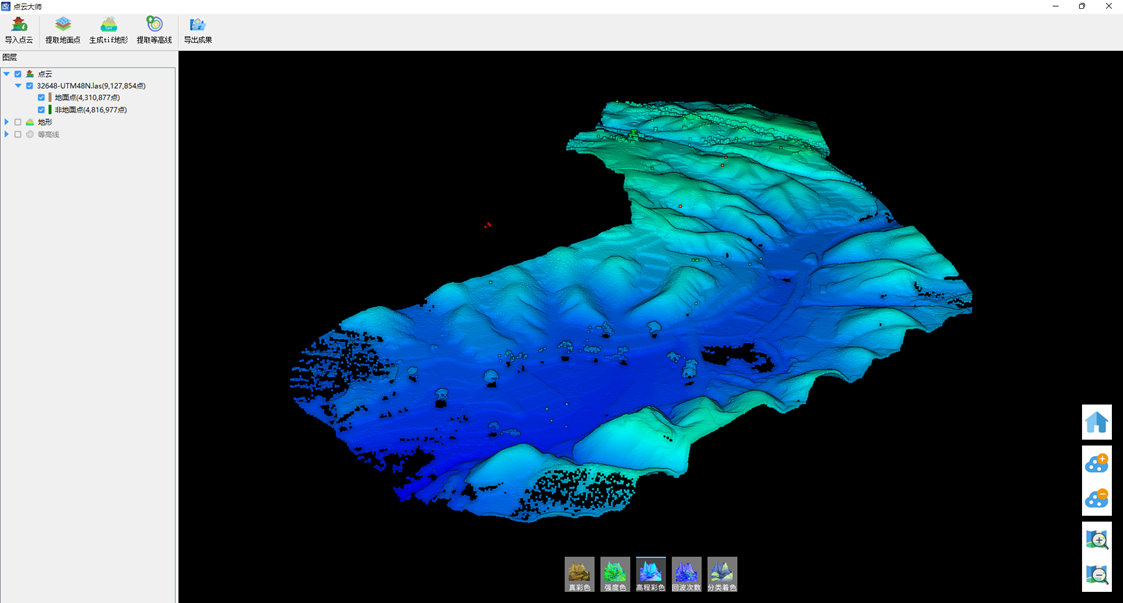
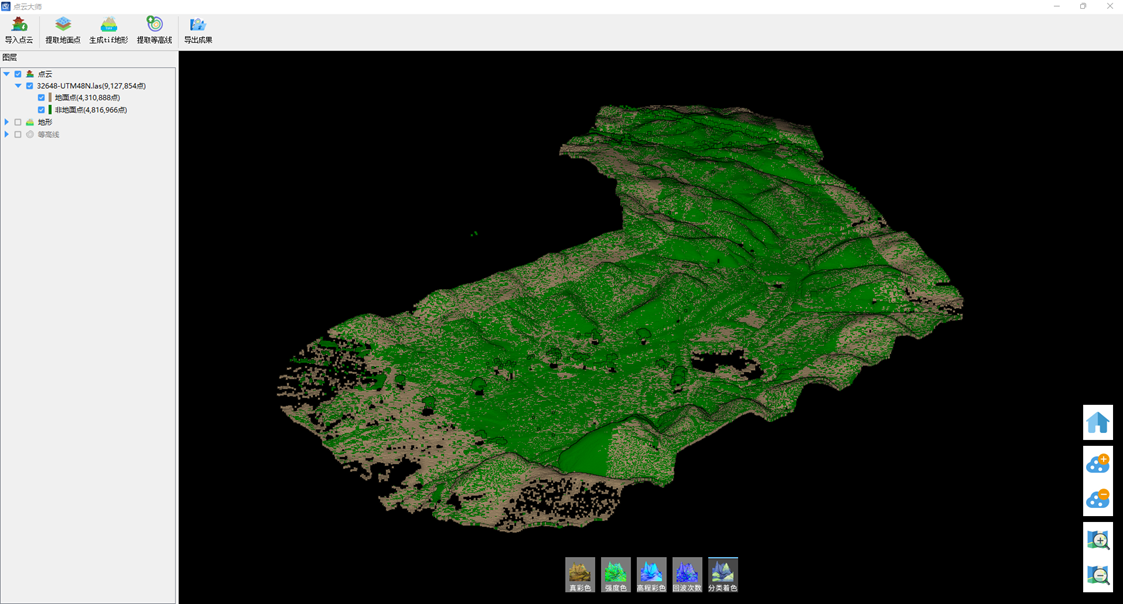
1.1点云赋色
激光雷达(LiDAR)点云数据具备高精度的坐标信息,但缺乏颜色信息,难以用真实的色彩对现实世界进行直观展示。点云赋色的目的是给点云着色,增加颜色属性信息,提供更好的可视化效果,便于地物识别与应用,是点云数据处理基本且重要的功能。
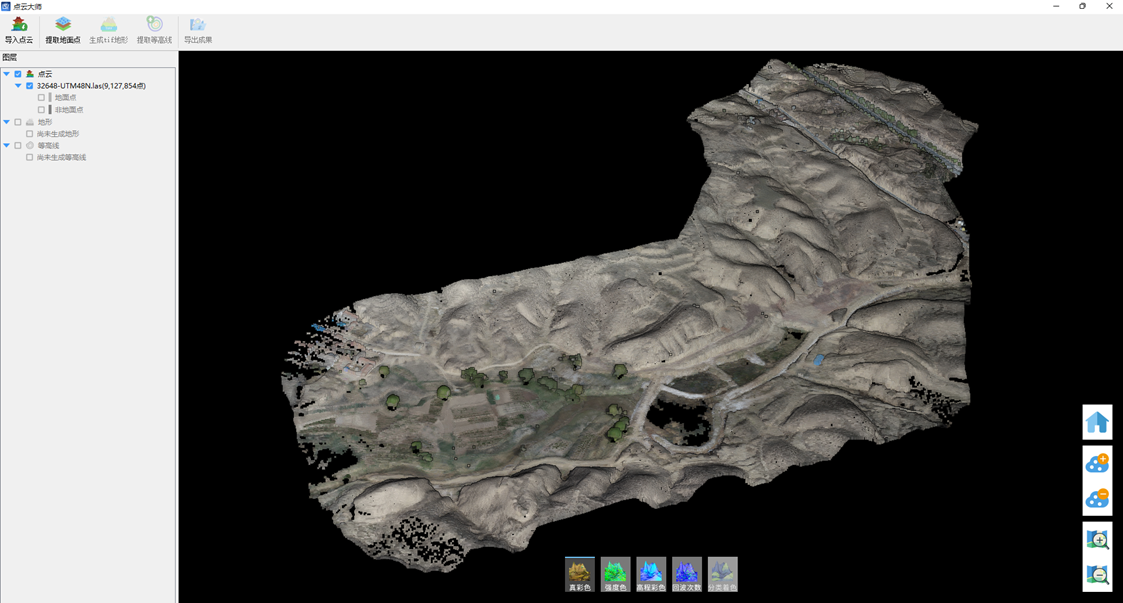
1.1.1真彩色
大多数激光雷达软件都具有合并激光雷达和图像的能力。相机拍摄的影像数据包含丰富的颜色信息,通过点云与影像的匹配,可以将影像中的颜色信息附加在点云中,使点云在渲染时更加真实。
1.1.2强度色
强度是从激光脉冲返回传感器的能量。有很多因素会影响返回的能量量(例如表面粗糙度、大气影响、近红外能量吸收等),但激光雷达强度 可以从激光雷达的确切时间创建一个不错的黑白“伪图像”获得。使用强度值时,请始终记住强度通常未经校准,因此该数据仅适用于定性视觉分析。强度在某些情况下非常有用,但黑白点云非常无聊。存储在 LAS 中的另一条潜在信息是红-绿-蓝(RGB) 值。一些激光雷达点云带有在供应商的 LAS 文件中编码的 RGB 值,但大多数都没有。幸运的是,很容易将 RGB 信息添加到点云中。
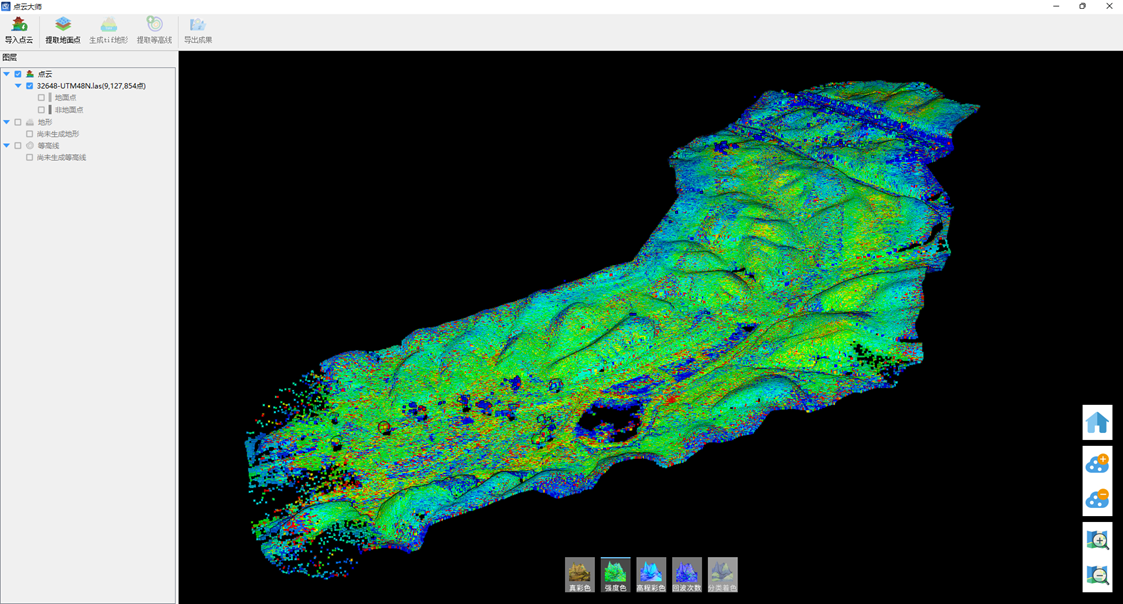
1.1.3高程彩色
虽然激光雷达(LiDAR)点云数据但缺乏颜色信息,单具备高精度的坐标信息。我们可以给数据集中每个点的垂直高程 (Z) 值进行分层设色。包括高程最大值与最小值,计算高程中间值;然后选取渲染的颜色值,比如红、绿、蓝三种颜色。最后,自上而下,应该为红绿蓝三种颜色渐变的过程,即点云坐标最小处设置为蓝色,中间值设置为绿色,最大值设置为红色。
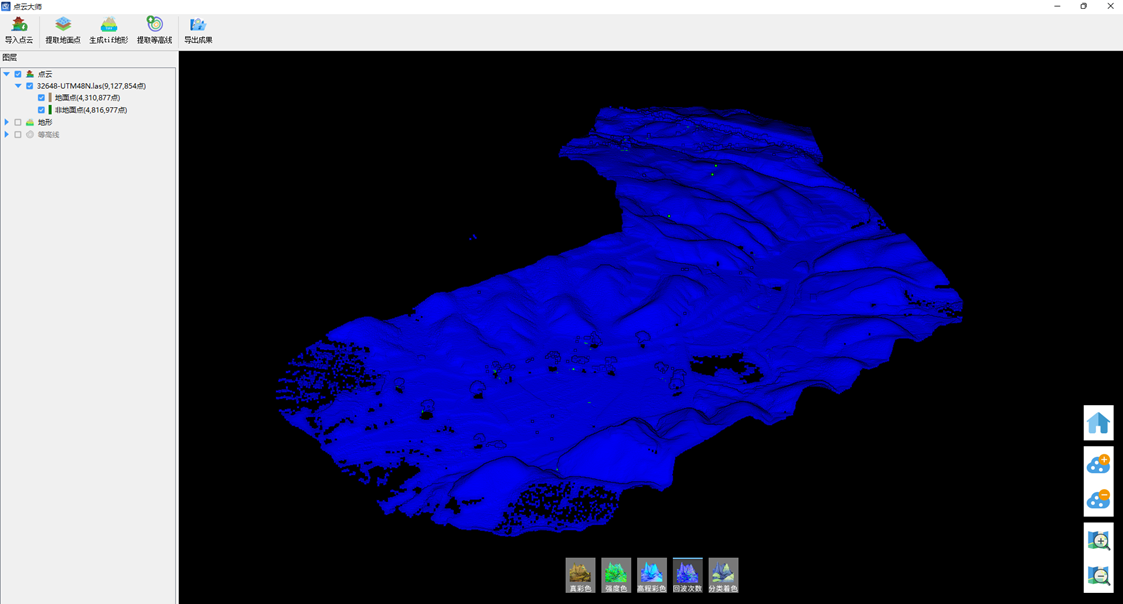
1.1.4回波次数模式
目前,对于多脉冲式机载LiDAR系统而言,系统记录的回波信息包括单次回波(singular return)和多次回波(multiple returns),二者的区别在于对同一束激光脉冲是否发生多次反射。即,当激光扫描仪发射的激光脉冲接触到被测目标时,部分脉冲能量的反射信号会被系统接收并记录,而剩余的脉冲能量继续传播,当遇到另一目标或原被测目标的另一部分时再次发生反射,直至能量消耗殆尽。如此发生的多次反射使得机载激光扫描系统接收到多个反射信号即多次回波信息。
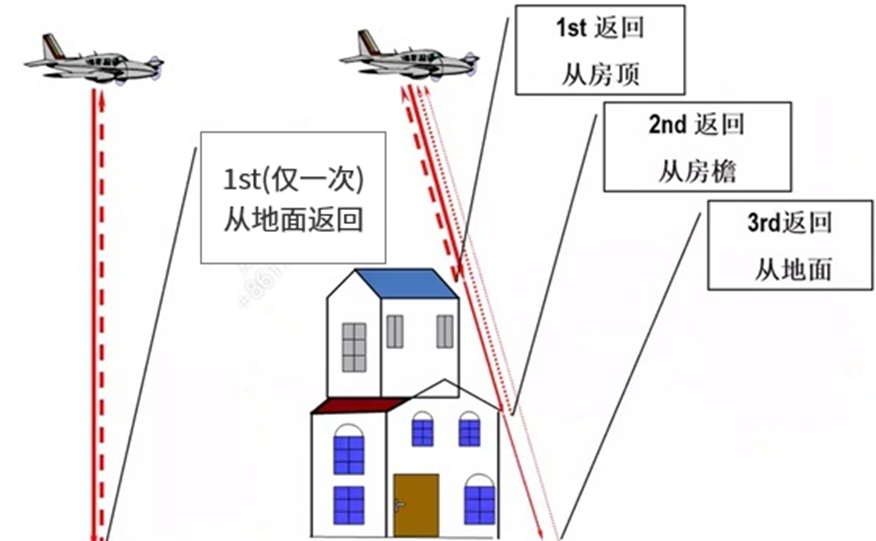
我们发现,多回波信息可以反应被测目标的类型,继而可以辅助数据滤波。具体而言,对于森林地区,单次回波包含地面激光脚点和植被冠层的激光脚点;首次回波来自茂密且高大的植被冠层或靠近冠层的枝叶;中间次回波多为高大植被的枝叶或低矮植被;而末次回波多是植被中间层次的枝叶和地表反射得到的激光脚点。无论对于森林地区还是城市区域,生成数字地面模型的地面激光脚点都应该从单次回波和尾次回波中获取;同时还可以利用首次回波和中间次回波提供的信息进一步减少参与滤波的单次回波和末次回波的角点数量。
LiDAR数据滤波是将激光点云数据区分为地面点和非地面点的模式识别过程。滤波及其配套的质量控制是激光数据后处理生成DEM过程中最关键也是最耗费时间的一步,几乎占到了后处理流程60%~80%的时间。
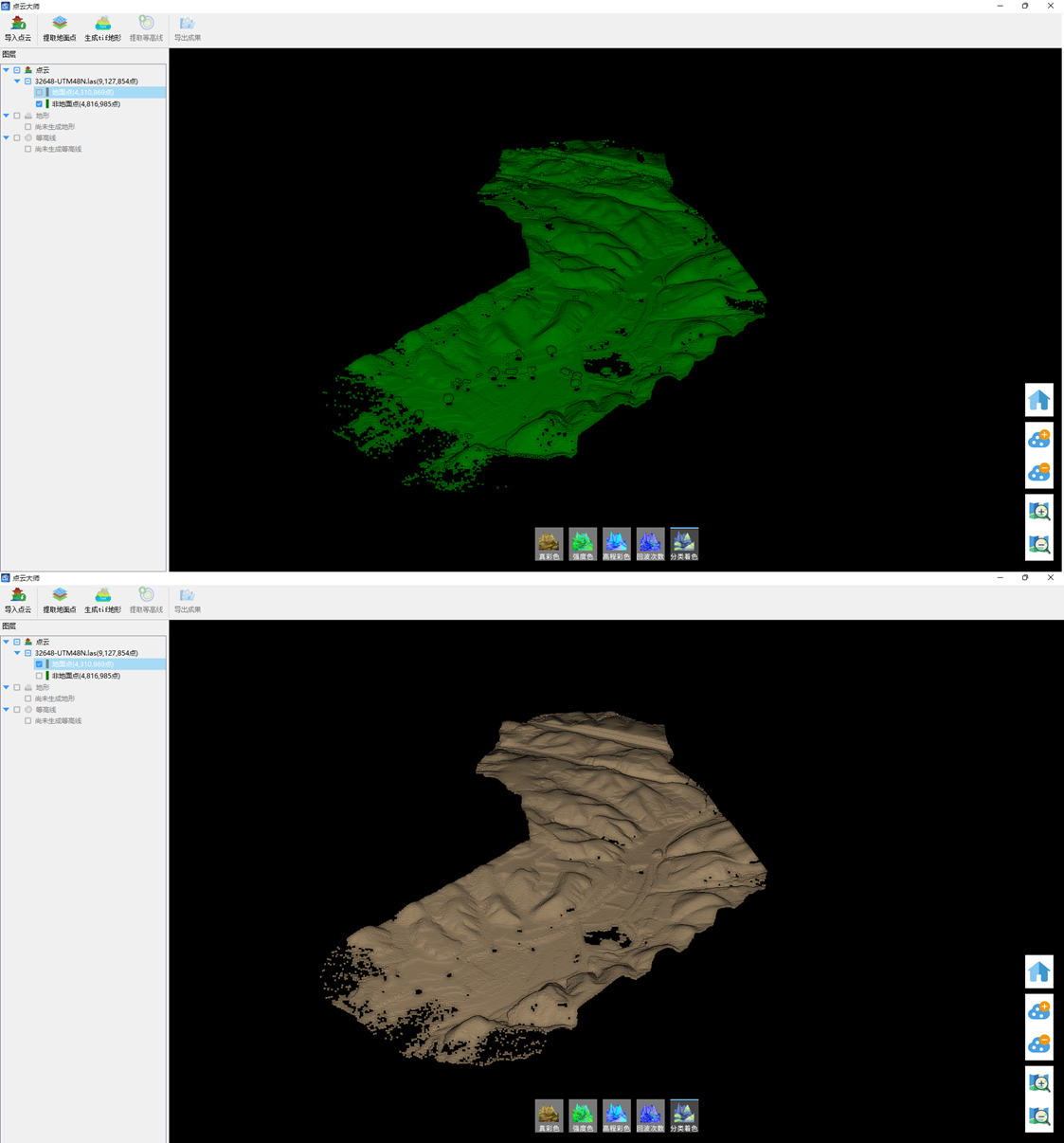
二、提取地面点
我们生活的3D世界由丰富多样的物体对象组成,如房屋、桥梁、树木、汽车等等,不同的物体对象具有不同的外观形态及功能。然而在机器的眼睛里,这些都是高低不一、颜色各异的点,称为点云。利用深度学习技术自动精确分割点云数据,并标记上不同物体对象的名称,可以应用于城市体检、自动驾驶、以及实景三维地球的建设。
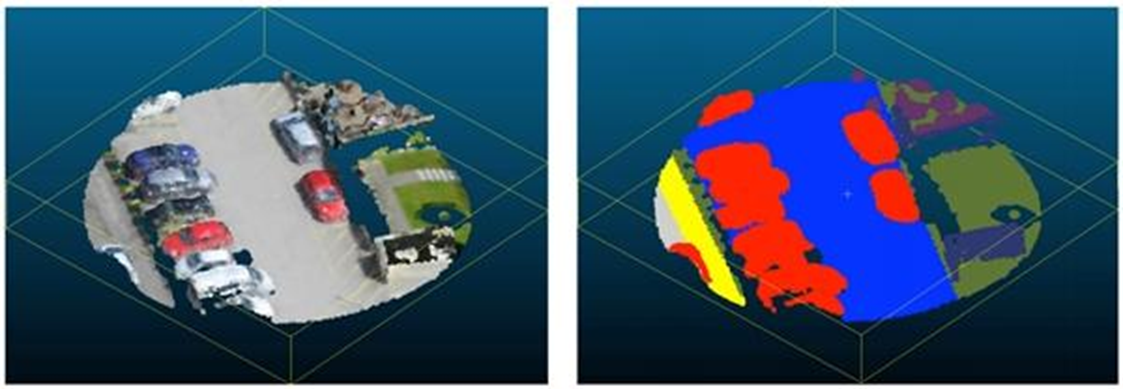
而在GIS中最常见的就是自动地面点检测和分类。

成功提取地面点后,可以将点云数据集分类为地面点和地面点,并赋予不同的颜色来区分,并且可以单独显隐某个分类的点。
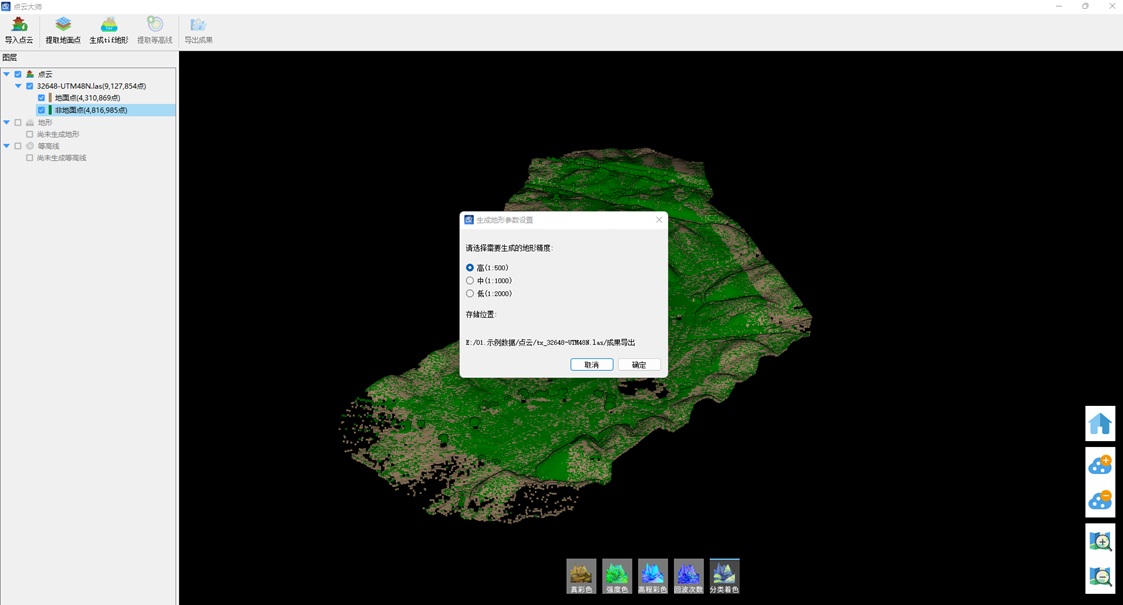
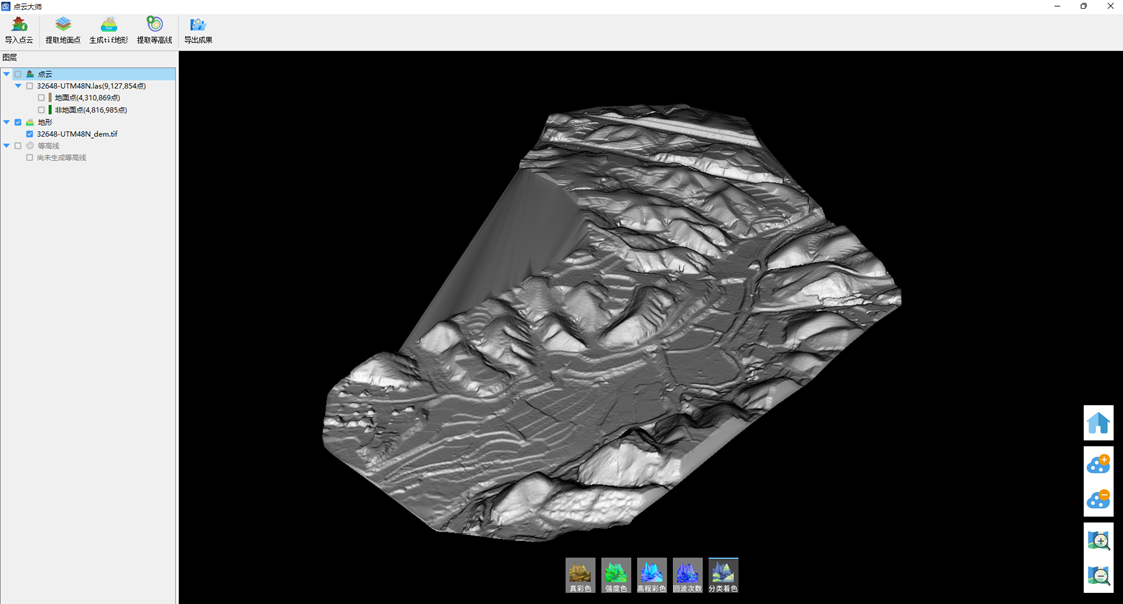
三、生产TIF格式地形数据
当激光雷达(LiDAR)点云数据完成地面点提取后,我们就得到了精准的地面点高程信息。通过这些高程值生成的 数字高程模型(DEM,Digital Elevation Model),其精度远远高于其他手段生产的DEM数据,例如:ALOS-12m。通过点云生成的DEM其精度甚至可以达到厘米级(需点云数据本身精度够)。通过提取的非地面点构建不规则三角网 (TIN) 表面,从而生成通用格式的TIF地形(DEM)数据成果。
点云大师提供了3个默认的国家标准的地形精度预设选项:

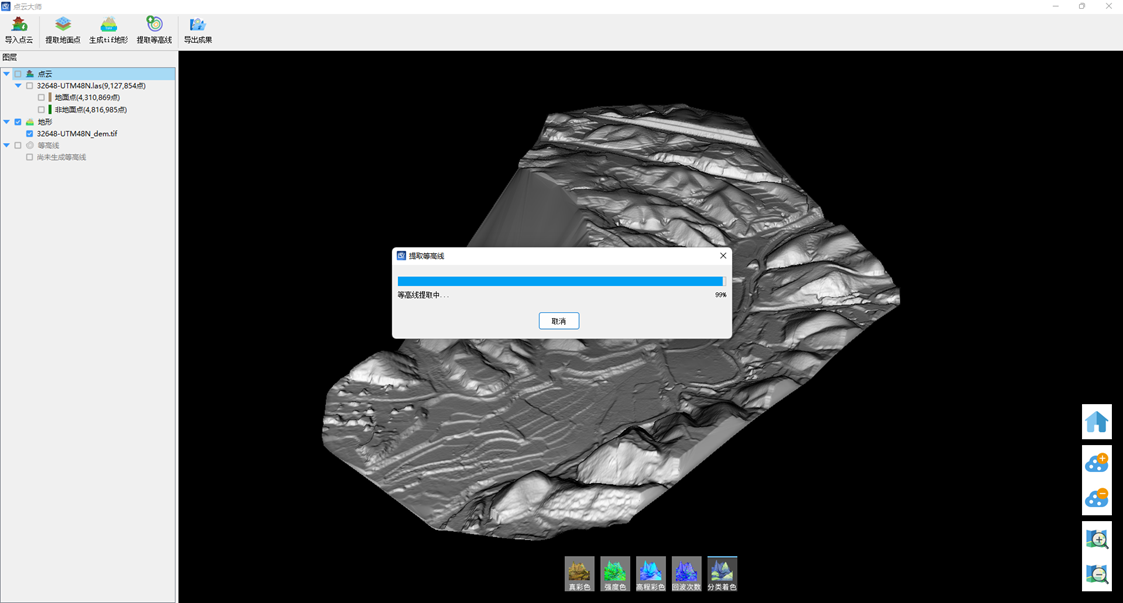
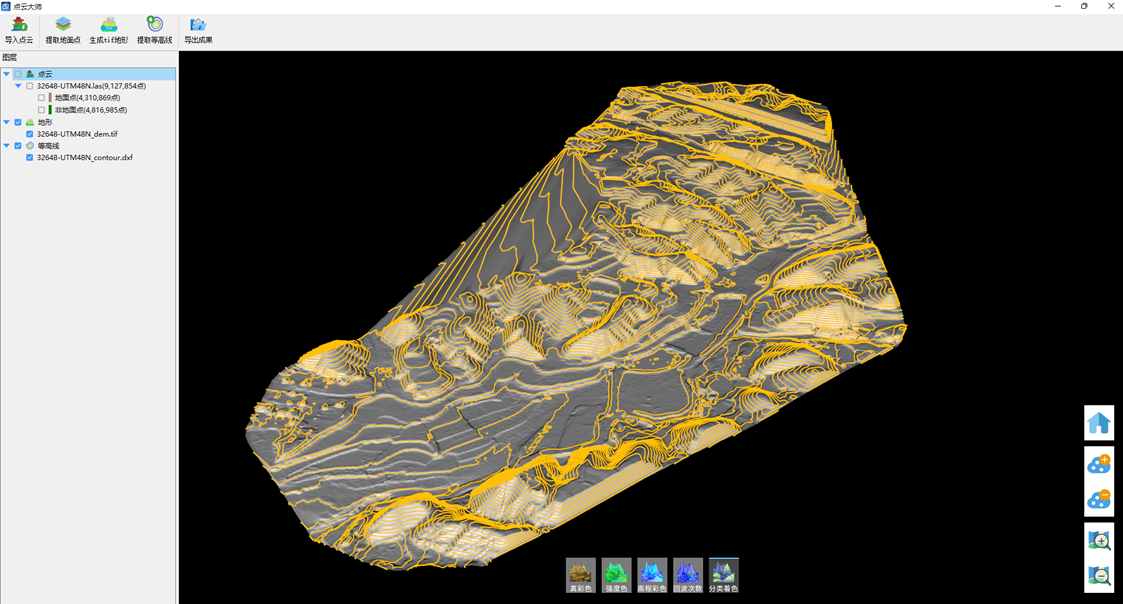
四、提取等高线
等高线是地图上表示的表面的常用方法之一。等高线是将数值相等的相邻点的连接成光滑曲线。等高线的分布反映了栅格表面上高程值的变化,等高线分布越密集的地方,表示栅格表面值的变化比较剧烈,越密集,坡度越陡峭;分布较稀疏,表示栅格表面值的变化较小,则表示坡度很平缓。通过提取等高线,可以找到高程值相同的位置,同时等高线的分布状况也可以显示出变化的陡峭和平缓区。
通过点云生成了高精度地形后,再基于地形提取高精度的等高线。
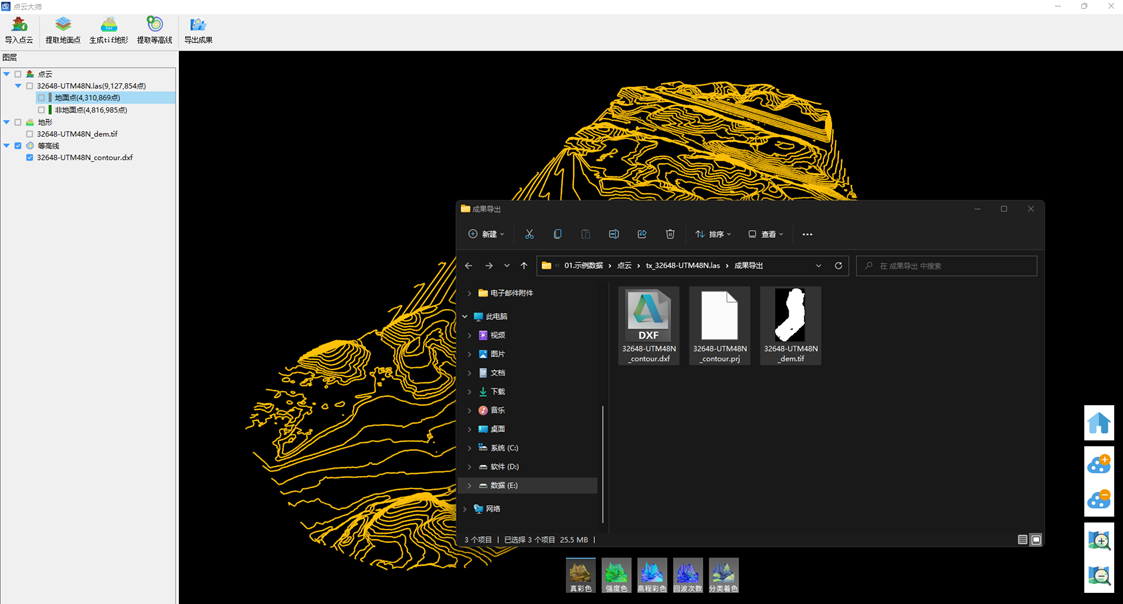
五、成果导出
通过点云数据提取的高精度地形(DEM)和等高线数据,都可以随时获取并进入到你其他工作环节中。















 1283
1283











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









