






四轮毂驱动电动汽车稳定性控制,分布式驱动转矩分配。
上层基于滑模,模糊神经网络控制器决策横摆力矩,下层基于动态载荷分配,最优分配,平均分配均可做。
simulink与carsim联合仿真。
ID:361642524761748
敬南山~
四轮毂驱动电动汽车稳定性控制是当前研究的热点之一。在汽车行业快速发展的背景下,电动汽车的普及程度和市场需求不断增加。然而,由于其独特的动力系统结构和特性,电动汽车的稳定性控制面临着新的挑战。
在传统车辆中,多数采用内燃机作为主要动力来源,通过传动系统将动力分配到前后轮。而电动汽车则采用四轮毂驱动,即每个车轮都独立驱动,这为电动汽车的稳定性控制带来了新的机遇和挑战。
为了提高电动汽车的操控性和稳定性,研究人员提出了多种控制策略和方法。其中,基于滑模和模糊神经网络的控制器是一种常用的上层控制决策方法。滑模控制器能够通过对车辆运动状态的监测和分析,实时调整横摆力矩,从而实现对车辆操纵性能的优化。而模糊神经网络控制器则通过学习和识别车辆动力学模型,实现对车辆稳定性控制的智能化和自适应性。
在下层控制方面,动态载荷分配是一种常见的分布式驱动转矩分配方法。动态载荷分配能够根据车辆的动态要求和驱动条件,实时调整各个轮胎的驱动转矩,从而实现对车辆的稳定性控制。最优分配和平均分配是两种常用的动态载荷分配策略。最优分配基于车辆的动力学模型和控制目标,通过优化算法计算出最优的驱动转矩分配方案。而平均分配则简化了计算过程,将驱动转矩均匀分配给各个轮胎。
为了验证上述控制策略的有效性和可靠性,需要进行仿真和实验研究。常用的仿真工具包括simulink和carsim。simulink是一种功能强大的模拟环境,可以用于构建和仿真多种复杂系统。carsim则是一种专门用于汽车动力学仿真的软件,可以模拟车辆的运动和控制。
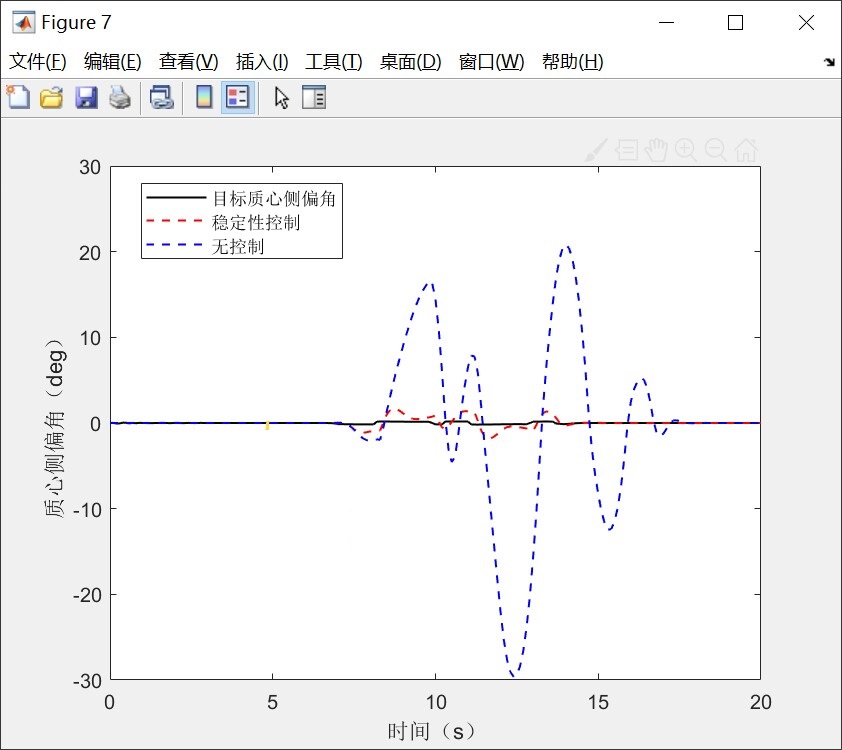
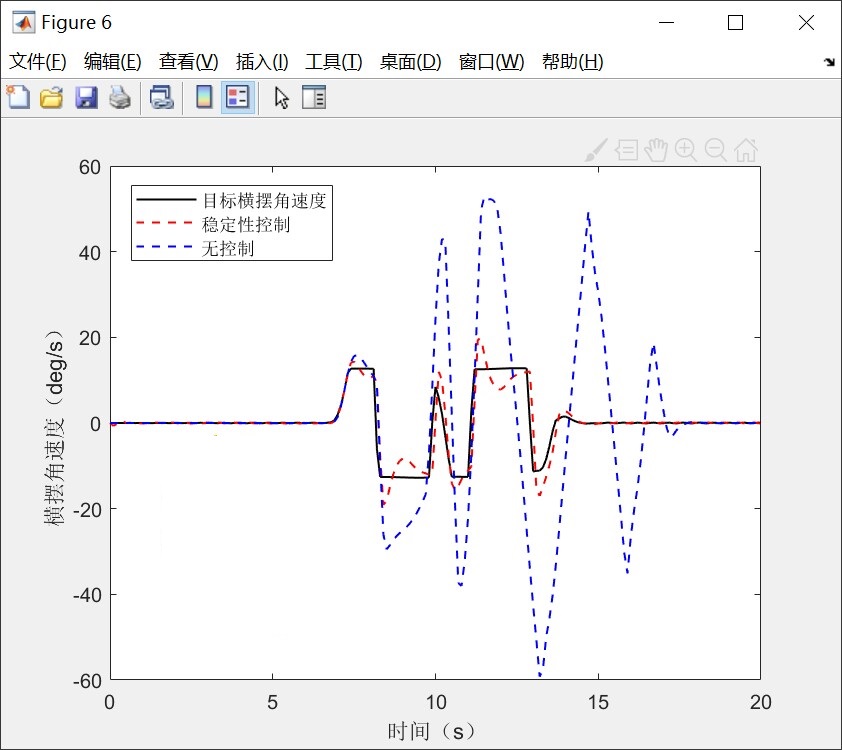
综上所述,四轮毂驱动电动汽车稳定性控制是一个复杂而重要的问题。通过上层基于滑模和模糊神经网络的控制器决策横摆力矩,下层基于动态载荷分配的最优分配和平均分配,可以实现对车辆的稳定性控制。同时,simulink与carsim的联合仿真可以验证控制策略的有效性和可靠性。这些研究成果为电动汽车的安全性能和市场竞争力提供了重要支持。希望通过进一步研究和实践,能够推动电动汽车稳定性控制技术的发展和应用。
相关的代码,程序地址如下:http://imgcs.cn/642524761748.html
















 1466
1466

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









