







# 分配目标
def assign_targets_single(self, anchors, gt_boxes, gt_classes, matched_threshold=0.6, unmatched_threshold=0.45):
# Car:匹配使用0.6和0.45的正负样本阈值
# anchors:[107136, 7]
# gt_boxes:[num, 7]
# gt_classes:[1, num] ,Car:全是1、Pedestrian:全是2、Cyclist:全是3 , gt_boxes的类别标签
num_anchors = anchors.shape[0] # 107136
num_gt = gt_boxes.shape[0] # 不固定
labels = torch.ones((num_anchors,), dtype=torch.int32, device=anchors.device) * -1 # [-1, -1, -1, ...] [107136, 1]
gt_ids = torch.ones((num_anchors,), dtype=torch.int32, device=anchors.device) * -1 # [-1, -1, -1, ...] [107136, 1]
# IOU 计算
if len(gt_boxes) > 0 and anchors.shape[0] > 0:
anchor_by_gt_overlap = iou3d_nms_utils.boxes_iou3d_gpu(anchors[:, 0:7], gt_boxes[:, 0:7]) \
if self.match_height else box_utils.boxes3d_nearest_bev_iou(anchors[:, 0:7], gt_boxes[:, 0:7])
# IOU:[107136, num_gt_box]
def boxes3d_nearest_bev_iou(boxes_a, boxes_b):
"""
Args:
boxes_a: (N, 7) [x, y, z, dx, dy, dz, heading]
boxes_b: (N, 7) [x, y, z, dx, dy, dz, heading]
Returns:
"""
boxes_bev_a = boxes3d_lidar_to_aligned_bev_boxes(boxes_a)
boxes_bev_b = boxes3d_lidar_to_aligned_bev_boxes(boxes_b)
return boxes_iou_normal(boxes_bev_a, boxes_bev_b)
# 雷达坐标系,转换到bev视图坐标
def boxes3d_lidar_to_aligned_bev_boxes(boxes3d):
"""
Args:
boxes3d: (N, 7 + C) [x, y, z, dx, dy, dz, heading] 在激光雷达坐标系中
Returns:
aligned_bev_boxes: (N, 4) [x1, y1, x2, y2] in the above lidar coordinate 俯视图
"""
rot_angle = common_utils.limit_period(boxes3d[:, 6], offset=0.5, period=np.pi).abs() # 旋转角度,只希望pi/2到-pi/2范围
# 进一步,将全部gt_box规范到pi/4到-pi/4范围内,好匹配
choose_dims = torch.where(rot_angle[:, None] < np.pi / 4, boxes3d[:, [3, 4]], boxes3d[:, [4, 3]])
aligned_bev_boxes = torch.cat((boxes3d[:, 0:2] - choose_dims / 2, boxes3d[:, 0:2] + choose_dims / 2), dim=1) # 中心 + 长宽
return aligned_bev_boxes
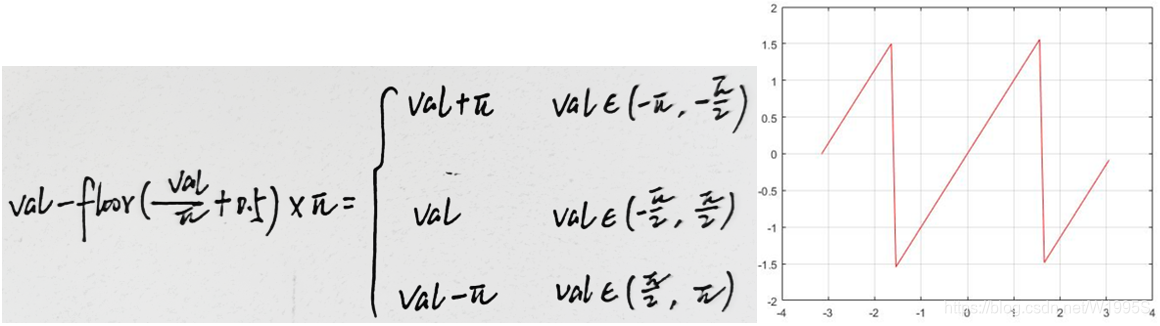
def limit_period(val, offset=0.5, period=np.pi):
val, is_numpy = check_numpy_to_torch(val)
ans = val - torch.floor(val / period + offset) * period # 向下取整,不大于元素的最大整数
return ans.numpy() if is_numpy else ans # 结果需要转numpy
公式:val - torch.floor(val / period + offset) * period如下,角度规范到pi/2到-pi/2范围
标准/普通 2D IOU 计算
def boxes_iou_normal(boxes_a, boxes_b):
"""
Args:
boxes_a: (N, 4) [x1, y1, x2, y2] [x_min, y_min, x_max, y_max]
boxes_b: (M, 4) [x1, y1, x2, y2]
Returns:
"""
assert boxes_a.shape[1] == boxes_b.shape[1] == 4
x_min = torch.max(boxes_a[:, 0, None], boxes_b[None, :, 0])
x_max = torch.min(boxes_a[:, 2, None], boxes_b[None, :, 2])
y_min = torch.max(boxes_a[:, 1, None], boxes_b[None, :, 1])
y_max = torch.min(boxes_a[:, 3, None], boxes_b[None, :, 3])
x_len = torch.clamp_min(x_max - x_min, min=0)
y_len = torch.clamp_min(y_max - y_min, min=0)
area_a = (boxes_a[:, 2] - boxes_a[:, 0]) * (boxes_a[:, 3] - boxes_a[:, 1])
area_b = (boxes_b[:, 2] - boxes_b[:, 0]) * (boxes_b[:, 3] - boxes_b[:, 1])
a_intersect_b = x_len * y_len # 交
iou = a_intersect_b / torch.clamp_min(area_a[:, None] + area_b[None, :] - a_intersect_b, min=1e-6)
return iou














 5175
5175











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









