






编辑丨极市平台
导读
目标检测应当在这几年当中研究数量以及应用范围最广的一个领域,也持续的受到很多深度学习者们的关注。本文收集和整理了15个目标检测相关的开源数据集,希望能给大家的学习带来帮助。
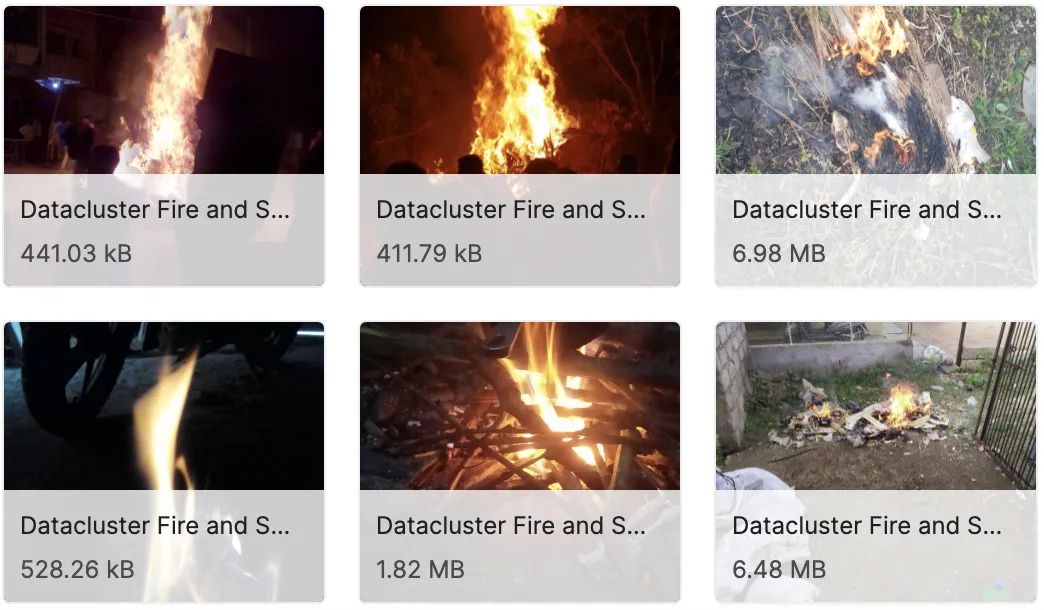
1.火焰和烟雾图像数据集
数据集链接:http://m6z.cn/6fzn0f
该数据集由早期火灾和烟雾的图像数据集组成。数据集由在真实场景中使用手机拍摄的早期火灾和烟雾图像组成。大约有7000张图像数据。图像是在各种照明条件(室内和室外场景)、天气等条件下拍摄的。该数据集非常适合早期火灾和烟雾探测。数据集可用于火灾和烟雾识别、检测、早期火灾和烟雾、异常检测等。数据集还包括典型的家庭场景,如垃圾焚烧、纸塑焚烧、田间作物焚烧、家庭烹饪等。
2.DOTA航拍图像数据集
DOTA是用于航空图像中目标检测的大型数据集。它可以用于开发和评估航空图像中的目标探测器。这些图像是从不同的传感器和平台收集的。每个图像的大小在800×800到20000×20000像素之间,包含显示各种比例、方向和形状的对象。DOTA图像中的实例由航空图像解释专家通过任意(8 d.o.f.)四边形进行注释。

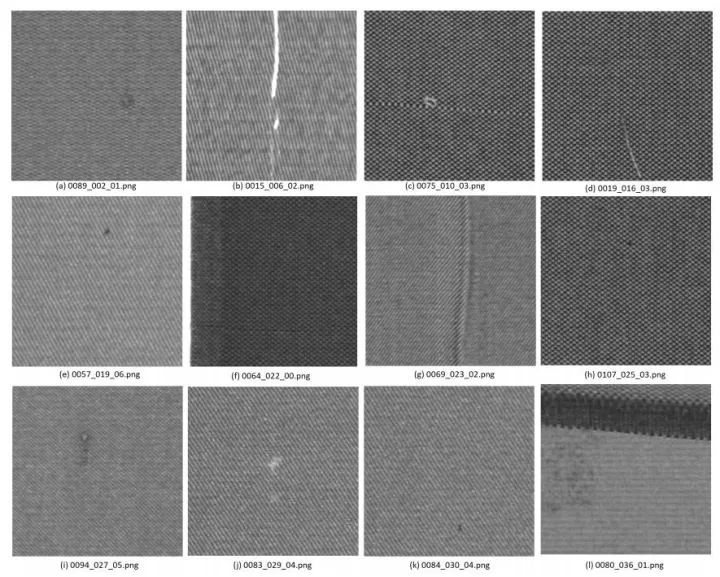
3. AITEX数据集
数据集链接:http://m6z.cn/5DdJL1
该数据库由七个不同织物结构的245张4096 x 256像素图像组成。数据库中有140个无缺陷图像,每种类型的织物20个,除此之外,有105幅纺织行业中常见的不同类型的织物缺陷(12种缺陷)图像。图像的大尺寸允许用户使用不同的窗口尺寸,从而增加了样本数量。
4. T-LESS数据集
数据集链接:http://m6z.cn/5wnucm
该数据集采集的目标为工业应用、纹理很少的目标,同时缺乏区别性的颜色,且目标具有对称性和互相关性,数据集由三个同步的传感器获得,一个结构光传感器,一个RGBD sensor,一个高分辨率RGBsensor,从每个传感器分别获得了3.9w训练集和1w测试集,此外为每个目标创建了2个3D model,一个是CAD手工制作的另一个是半自动重建的。训练集图片的背景大多是黑色的,而测试集的图片背景很多变,会包含不同光照、遮挡等等变换(之所以这么做作者说是为了使任务更具有挑战性)。
同时作者解释了本数据集的优势在于:1.大量跟工业相关的目标;2.训练集都是在可控的环境下抓取的;3.测试集有大量变换的视角;4.图片是由同步和校准的sensor抓取的;5.准确的6D pose标签;6.每个目标有两种3D模型;

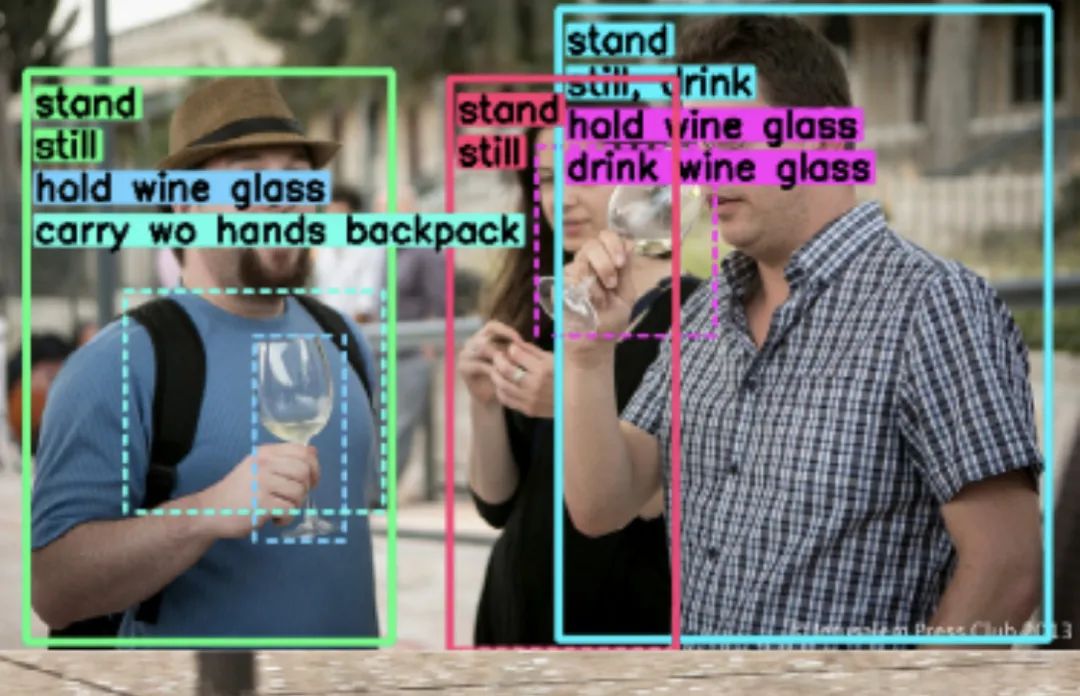
5.H²O 行人交互检测数据集
数据集链接:http://m6z.cn/6fzmQf
H²O由V-COCO数据集中的10301张图像组成,其中添加了3635张图像,这些图像主要包含人与人之间的互动。所有的H²O图像都用一种新的动词分类法进行了注释,包括人与物和人与人之间的互动。该分类法由51个动词组成,分为5类:
描述主语一般姿势的动词
与主语移动方式有关的动词
与宾语互动的动词
描述人与人之间互动的动词
涉及力量或暴力的互动动词
6.SpotGarbage垃圾识别数据集
数据集链接:http://m6z.cn/5ZMmRG
图像中的垃圾(GINI)数据集是SpotGarbage引入的一个数据集,包含2561张图像,956张图像包含垃圾,其余的是在各种视觉属性方面与垃圾非常相似的非垃圾图像。

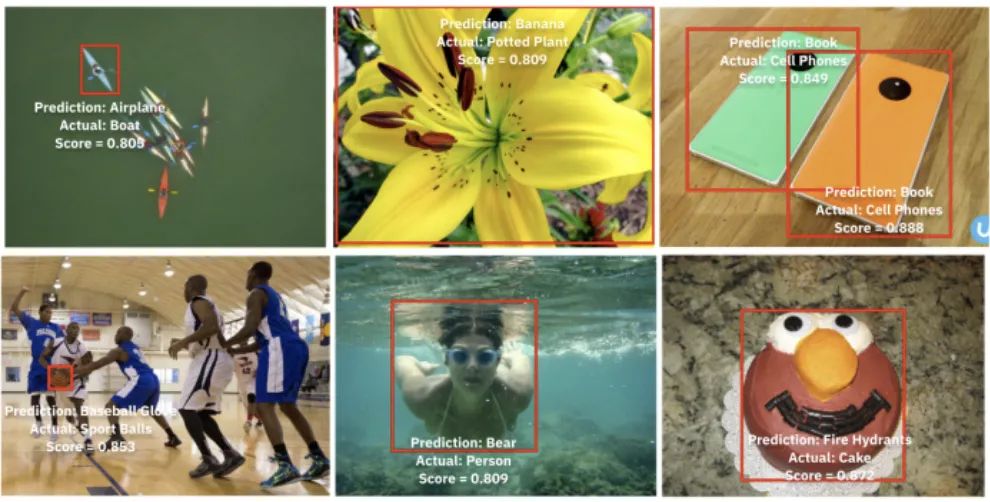
7.NAO自然界对抗样本数据集
数据集链接:http://m6z.cn/5KJWJA
NAO包含7934张图像和9943个对象,这些图像未经修改,代表了真实世界的场景,但会导致最先进的检测模型以高置信度错误分类。与标准MSCOCO验证集相比,在NAO上评估时,EfficientDet-D7的平均精度(mAP)下降了74.5%。
8.Labelme 图像数据集
数据集链接:http://m6z.cn/5Sg9NX
Labelme Dataset 是用于目标识别的图像数据集,涵盖 1000 多个完全注释和 2000 个部分注释的图像,其中部分注释图像可以被用于训练标记算法 ,测试集拥有来自于世界不同地方拍摄的图像,这可以保证图片在续联和测试之间会有较大的差异。该数据集由麻省理工学院 –计算机科学和人工智能实验室于 2007 年发布,相关论文有《LabelMe: a database and web-based tool for image annotation》。
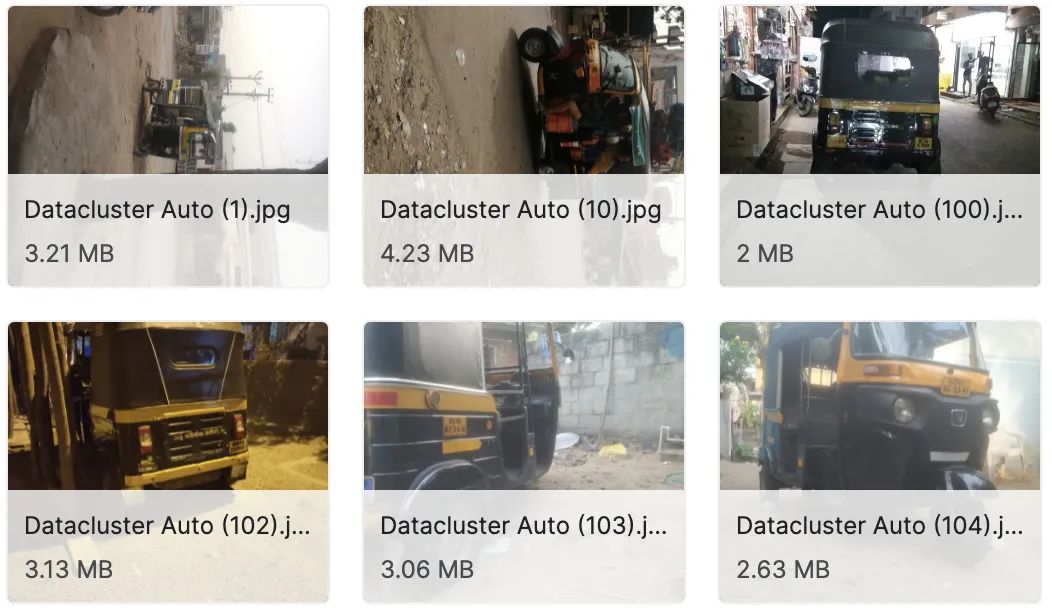
9.印度车辆数据集
数据集链接:http://m6z.cn/6uxAIx
该数据集包括小众印度车辆的图像,如Autorikshaw、Tempo、卡车等。该数据集由用于分类和目标检测的小众印度车辆图像组成。据观察,这些小众车辆(如autorickshaw、tempo、trucks等)上几乎没有可用的数据集。这些图像是在白天、晚上和晚上的不同天气条件下拍摄的。该数据集具有各种各样的照明、距离、视点等变化。该数据集代表了一组非常具有挑战性的利基类车辆图像。该数据集可用于驾驶员辅助系统、自动驾驶等的图像识别和目标检测。
10.Seeing 3D chairs椅子检测模型
数据集链接:http://m6z.cn/5DdK0v
椅子数据集包含大约1000个不同三维椅子模型的渲染图像。

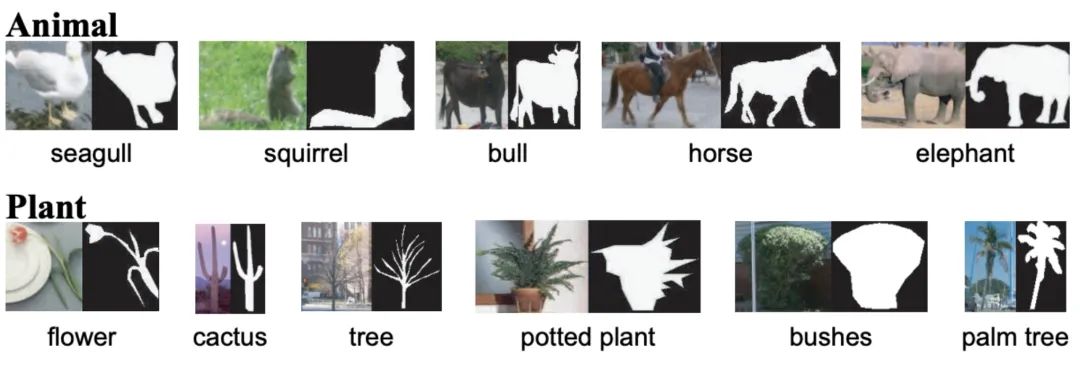
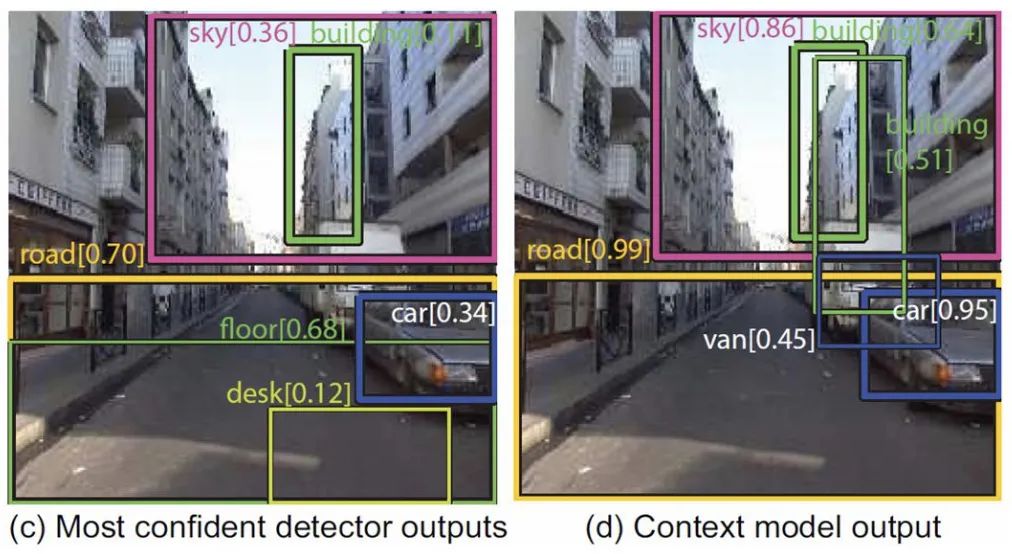
11.SUN09场景理解数据集
数据集链接:http://m6z.cn/60wX8r
SUN09数据集包含12000个带注释的图像,其中包含200多个对象类别。它由自然、室内和室外图像组成。每个图像平均包含7个不同的注释对象,每个对象的平均占用率为图像大小的5%。对象类别的频率遵循幂律分布。发布者使用 397 个采样良好的类别进行场景识别,并以此搭配最先进的算法建立新的性能界限。
该数据集由普林斯顿视觉与机器人实验室于 2014 年发布,相关论文有《SUN Database: Large-scale Scene Recognition from Abbey to Zoo》、《SUN Database: Exploring a Large Collection of Scene Categories》。
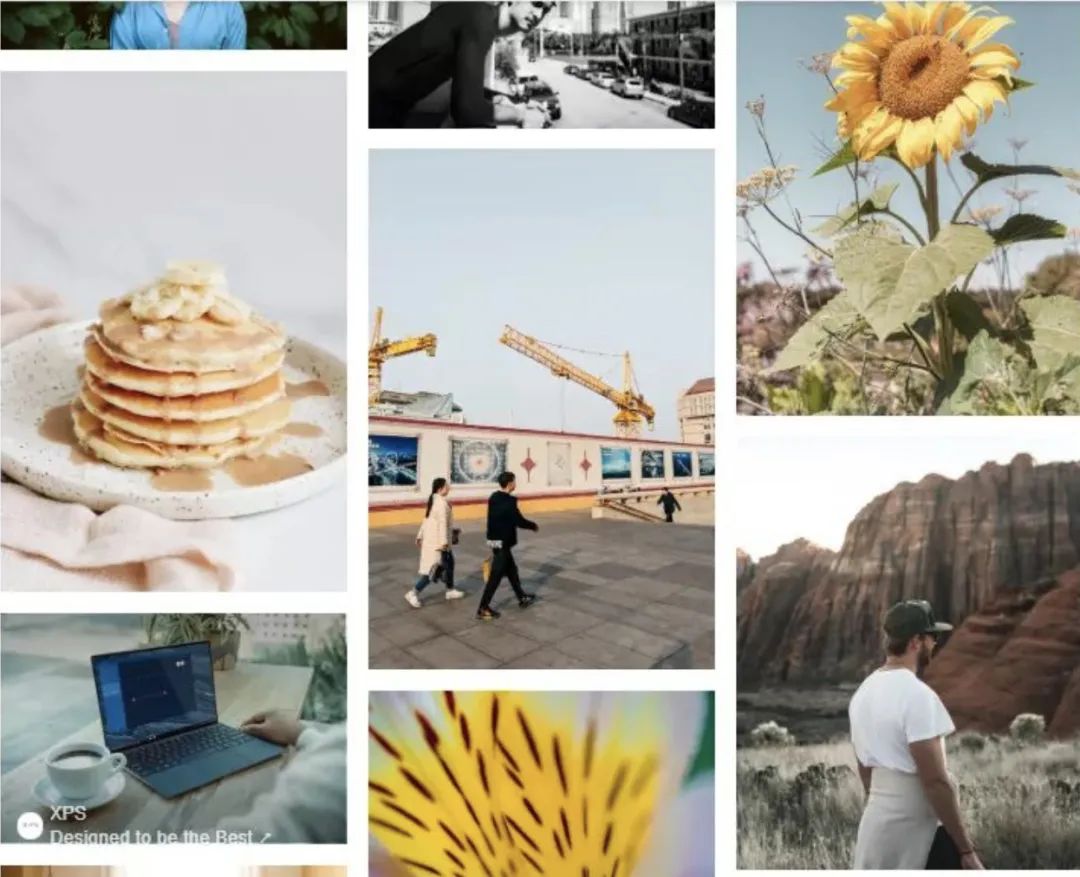
12.Unsplash图片检索数据集
数据集链接:http://m6z.cn/5wnuoM
使用迄今为止公开共享的全球最大的开放检索信息数据集。Unsplash数据集由250000多名贡献摄影师创建,并包含了数十亿次照片搜索的信息和对应的照片信息。由于Unsplash数据集中包含广泛的意图和语义,它为研究和学习提供了新的机会。
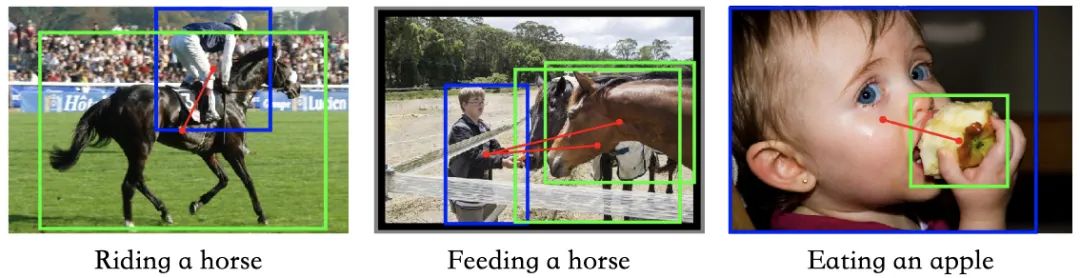
13.HICO-DET人物交互检测数据集
数据集链接:http://m6z.cn/5DdK6D
HICO-DET是一个用于检测图像中人-物交互(HOI)的数据集。它包含47776幅图像(列车组38118幅,测试组9658幅),600个HOI类别,由80个宾语类别和117个动词类别构成。HICO-DET提供了超过150k个带注释的人类对象对。V-COCO提供了10346张图像(2533张用于培训,2867张用于验证,4946张用于测试)和16199人的实例。
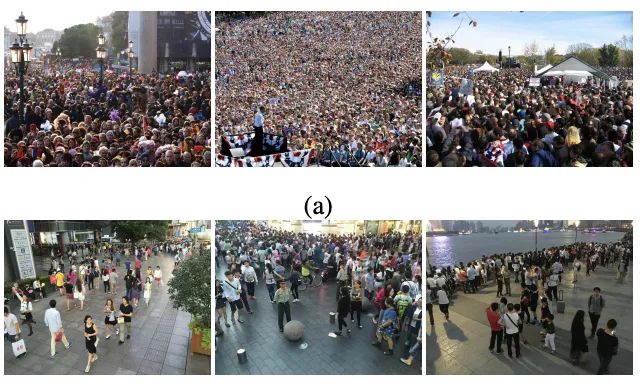
14.上海科技大学人群统计数据集
数据集链接:http://m6z.cn/5Sgafn
上海科技数据集是一个大规模的人群统计数据集。它由1198张带注释的群组图像组成。数据集分为两部分,A部分包含482张图像,B部分包含716张图像。A部分分为训练和测试子集,分别由300和182张图像组成。B部分分为400和316张图像组成的序列和测试子集。群组图像中的每个人都有一个靠近头部中心的点进行注释。总的来说,该数据集由33065名带注释的人组成。A部分的图像是从互联网上收集的,而B部分的图像是在上海繁忙的街道上收集的。
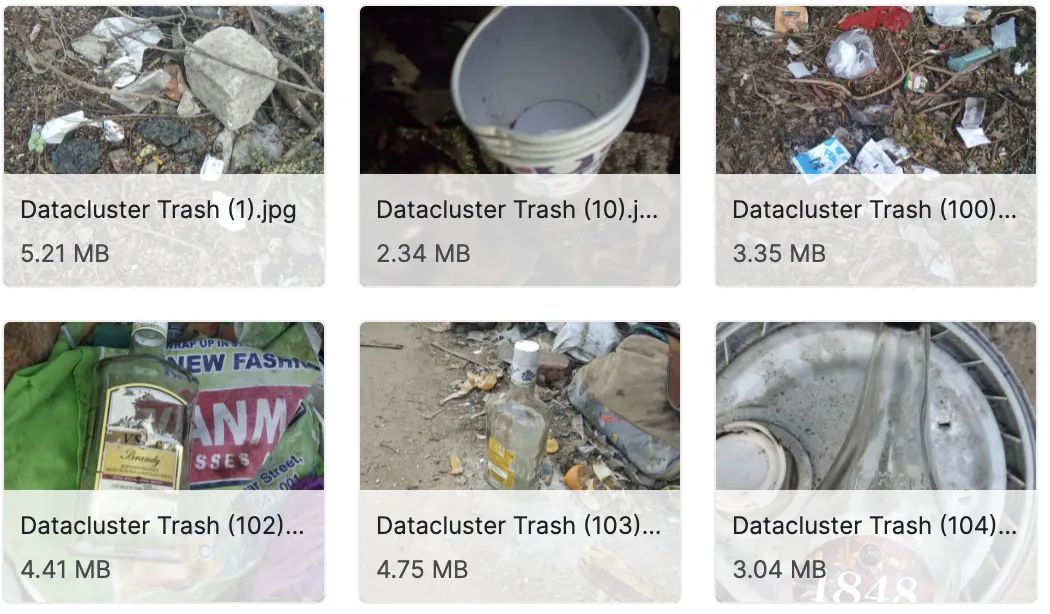
15.生活垃圾数据集
数据集链接:http://m6z.cn/6n5Adu
大约9000多张独特的图片。该数据集由印度国内常见垃圾对象的图像组成。图像是在各种照明条件、天气、室内和室外条件下拍摄的。该数据集可用于制作垃圾/垃圾检测模型、环保替代建议、碳足迹生成等。
本文仅做学术分享,如有侵权,请联系删文。
3D视觉精品课程推荐:
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









