







Init 进程源码分析
基于Linux内核的android系统,在内核启动完成后将创建一个Init用户进程,实现了内核空间到用户空间的转变。在Android
启动过程介绍一文中介绍了Android系统的各个启动阶段,init进程启动后会读取init.rc配置文件,通过fork系统调用启动init.rc文件中配置的各个Service进程。init进程首先启动启动android的服务大管家ServiceManager服务,然后启动Zygote进程。Zygote进程的启动开创了Java世界,无论是SystemServer进程还是android的应用进程都是Zygote的子进程,Zygote进程启动过程的源代码分析一文中详细介绍了Zygote进程的启动过程,System
Server进程启动过程源码分析则详细介绍了在Zygote进程启动完成后创建的第一个进程SystemServer进程的启动过程,SystemServer进程的启动包括两个阶段,在第一阶段主要是启动C++相关的本地服务,如SurfaceFlinger等,在第二阶段通过在ServerThread线程中启动android的各大关键Java服务。Zygote孵化应用进程过程的源码分析一文中详细介绍了Zygote进程创建android应用进程的过程,当用户点击Luncher上的应用图标时,Luncher进程通过socket向Zygote进程发送进程创建请求,Zygote进程接受客户端的请求后,通过fork系统调用为应用程序创建相应的进程。本文则介绍android用户进程的始祖Init进程,Init进程是Linux系统中用户空间的第一个进程,负责创建系统中的关键进程,同时提供属性服务来管理系统属性。
Android进程模型
Linux通过调用start_kernel函数来启动内核,当内核启动模块启动完成后,将启动用户空间的第一个进程——Init进程,下图为Android系统的进程模型图:
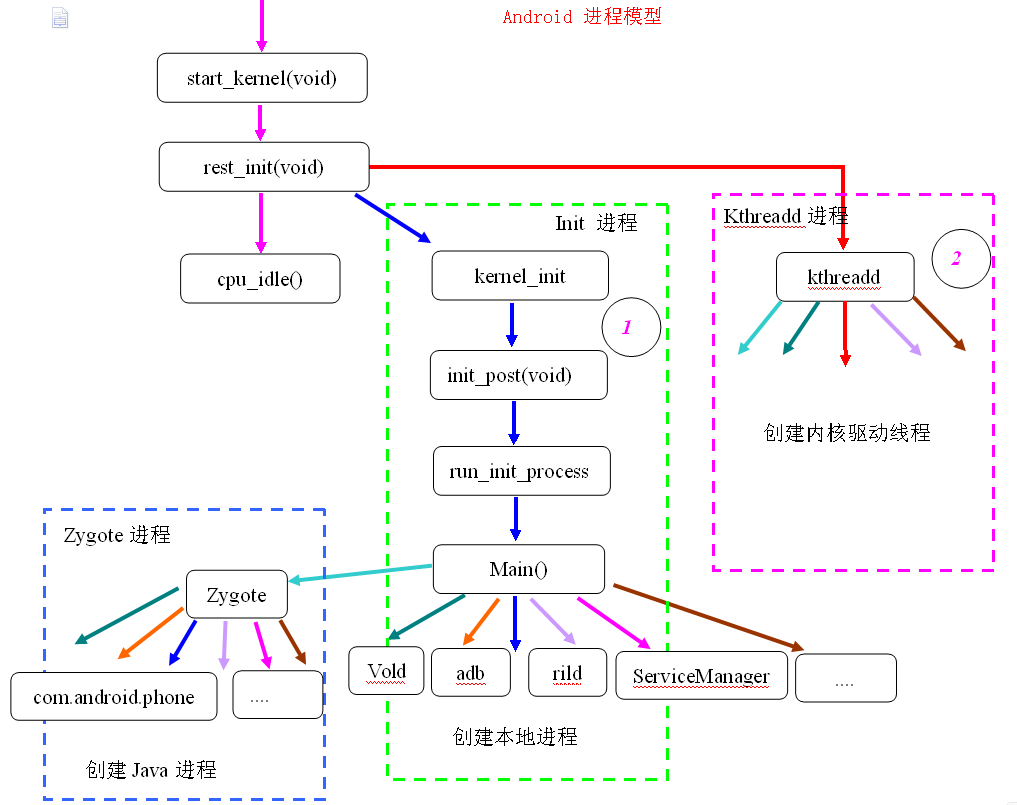
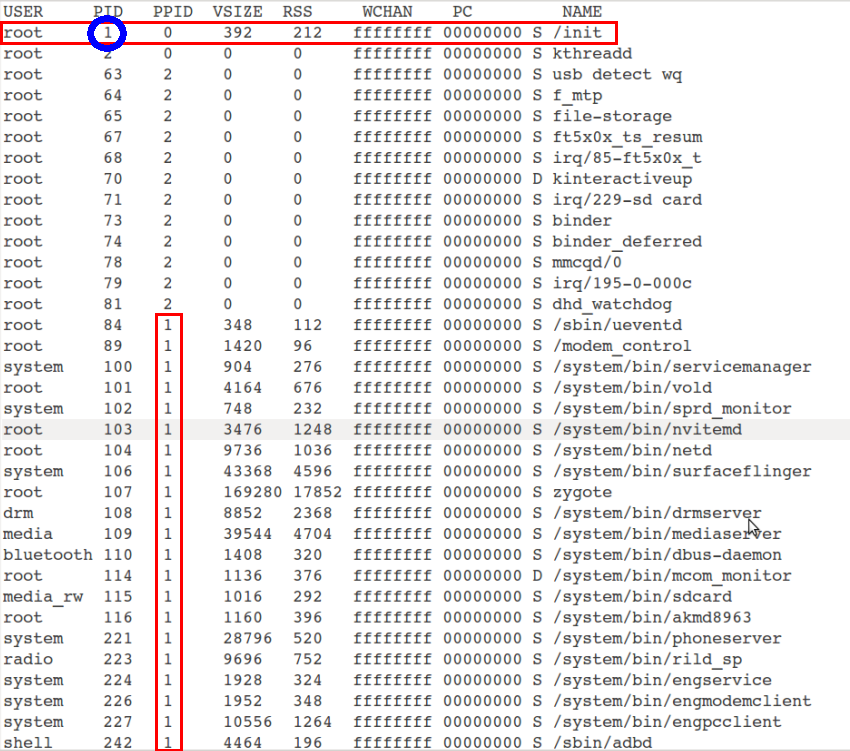
从上图可以看出,Linux内核在启动过程中,创建一个名为Kthreadd的内核进程,PID=2,用于创建内核空间的其他进程;同时创建第一个用户空间Init进程,该进程PID = 1,用于启动一些本地进程,比如Zygote进程,而Zygote进程也是一个专门用于孵化Java进程的本地进程,上图清晰地描述了整个Android系统的进程模型,为了证明以上进程模型的正确性,可以通过ps命令来查看进程的PID级PPID,下图显示了Init进程的PID为1,其他的本地进程的PPID都是1,说明它们的父进程都是Init进程,都是由Init进程启动的。
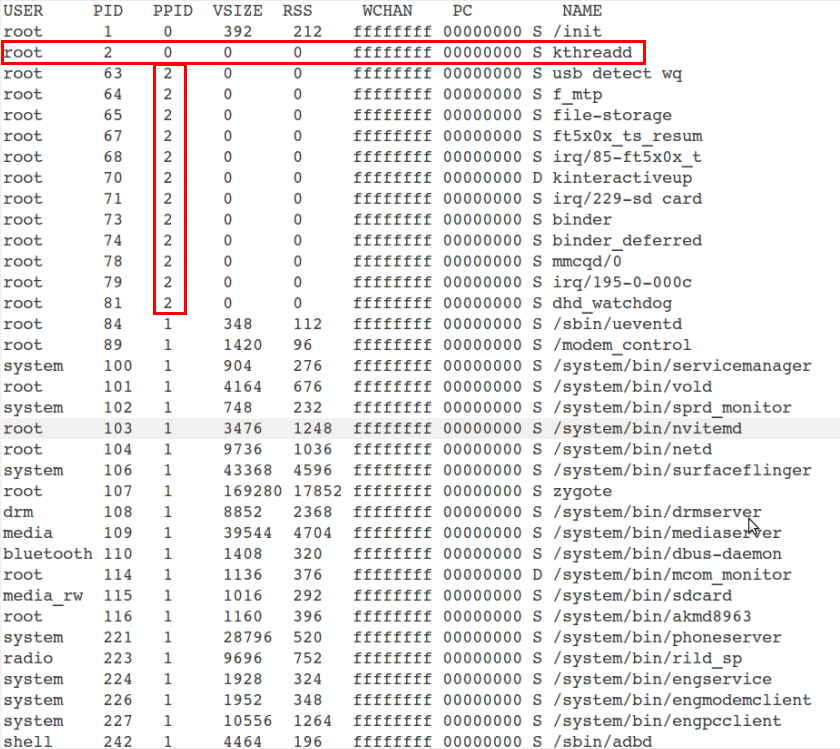
下图显示kthreadd进程的PID=2,有一部分内核进程如binder、dhd_watchdog等进程的PPID=2,说明这些进程都是由kthreadd进程创建:
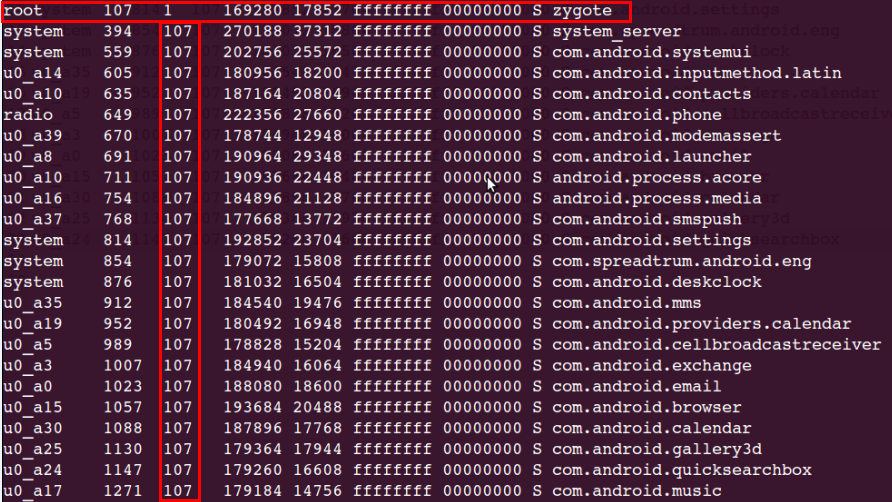
上图中显示zygote进程PID=107,下图显示了zygote进程创建的子进程,从图中可以看到,zygote进程创建的都是Java进程,证明了zygote进程开创了Android系统的Java世界。
上面介绍了Android系统的进程模型设计,接下来将详细分析Init进程。
Init进程源码分析
上节介绍了Init进程在Linux内核启动时被创建的,那它是如何启动的呢?
Init进程启动分析
在Linux内核启动过程中,将调用Start_kernel来初始化配置:
asmlinkage void __init start_kernel(void)
{
.............. //执行初始化工作
rest_init();
}start_kernel函数调用一些初始化函数完成初始化工作后,调用rest_init()函数来创建新的进程:
static noinline void __init_refok rest_init(void)
__releases(kernel_lock)
{
int pid;
rcu_scheduler_starting();
//创建一个kernel_init进程,该进程实质上是Init进程,用于启动用户空间进程
kernel_thread(kernel_init, NULL, CLONE_FS | CLONE_SIGHAND);
numa_default_policy();
//创建一个kthreadd内核线程,用于创建新的内核进程
pid = kernel_thread(kthreadd, NULL, CLONE_FS | CLONE_FILES);
rcu_read_lock();
kthreadd_task = find_task_by_pid_ns(pid, &init_pid_ns);
rcu_read_unlock();
complete(&kthreadd_done);
unlock_kernel();
/*
* The boot idle thread must execute schedule()
* at least once to get things moving:
*/
init_idle_bootup_task(current);
preempt_enable_no_resched();
schedule();
preempt_disable();
/* Call into cpu_idle with preempt disabled */
cpu_idle();
}在rest_init函数里完成两个新进程的创建:Init进程和kthreadd进程,因为Init进程创建在先,所以其PID=1而kthreadd的PID=2,本文只对Init进程进行详细分析,如果读者对kthreadd进行感兴趣,可自行分析。
kernel_thread函数仅仅调用了fork系统调用来创建新的进程,创建的子进程和父进程都执行在fork函数调用之后的代码,子进程是父进程的一个拷贝。
static int __init kernel_init(void * unused)
{
/*
* Wait until kthreadd is all set-up.
*/
wait_for_completion(&kthreadd_done);
/*
* init can allocate pages on any node
*/
set_mems_allowed(node_states[N_HIGH_MEMORY]);
/*
* init can run on any cpu.
*/
set_cpus_allowed_ptr(current, cpu_all_mask);
cad_pid = task_pid(current);
smp_prepare_cpus(setup_max_cpus);
//执行保存在__initcall_start与__early_initcall_end之间的函数
do_pre_smp_initcalls();
lockup_detector_init();
//smp 多核初始化处理
smp_init();
sched_init_smp();
//内核驱动模块初始化
do_basic_setup();
/* Open the /dev/console on the rootfs, this should never fail */
if (sys_open((const char __user *) "/dev/console", O_RDWR, 0) < 0)
printk(KERN_WARNING "Warning: unable to open an initial console.\n");
(void) sys_dup(0);
(void) sys_dup(0);
/*
* check if there is an early userspace init. If yes, let it do all
* the work
*/
if (!ramdisk_execute_command)
ramdisk_execute_command = "/init";
if (sys_access((const char __user *) ramdisk_execute_command, 0) != 0) {
ramdisk_execute_command = NULL;
prepare_namespace();
}
/*
* Ok, we have completed the initial bootup, and
* we're essentially up and running. Get rid of the
* initmem segments and start the user-mode stuff..
* 进入用户空间,执行用户空间代码
*/
init_post();
return 0;
}在kernel_init函数中调用__initcall_start到__initcall_end之间保存的函数进行驱动模块初始化,然后直接调用init_post()函数进入用户空间,执行Init 进程代码。
static noinline int init_post(void)
{
/* need to finish all async __init code before freeing the memory */
async_synchronize_full();
free_initmem();
mark_rodata_ro();
system_state = SYSTEM_RUNNING;
numa_default_policy();
current->signal->flags |= SIGNAL_UNKILLABLE;
//如果ramdisk_execute_command不为空,ramdisk_execute_command下的Init程序
if (ramdisk_execute_command) {
run_init_process(ramdisk_execute_command);
printk(KERN_WARNING "Failed to execute %s\n",ramdisk_execute_command);
}
//如果execute_command不为空,execute_command下的Init程序
if (execute_command) {
run_init_process(execute_command);
printk(KERN_WARNING "Failed to execute %s. Attempting ""defaults...\n", execute_command);
}
//如果以上路径下都没有init程序,就从/sbin、/etc、/bin三个路径下寻找init程序,同时启动一个sh进程
run_init_process("/sbin/init");
run_init_process("/etc/init");
run_init_process("/bin/init");
run_init_process("/bin/sh");
//如果以上路径都没有找到init程序,调用内核panic
panic("No init found. Try passing init= option to kernel. "
"See Linux Documentation/init.txt for guidance.");
}当根文件系统顶层目录中不存在init进程,或未指定启动选项"init="时,内核会到/sbin、/etc、/bin目录下查找init文件。如果在这些目录中仍未找到init文件,内核就会中止执行init进程,并引发Kernel Panic。run_init_process函数通过系统调用do_execve从内核空间跳转到用户空间,并且执行用户空间的Init程序的入口函数。
static void run_init_process(const char *init_filename)
{
argv_init[0] = init_filename;
kernel_execve(init_filename, argv_init, envp_init);
}这里就介绍完了内核启动流程,run_init_process函数的将执行Init程序的入口函数,Init的入口函数位于/system/core/init/init.c
Init进程源码分析
Android的init进程主要功能:
1)、分析init.rc启动脚本文件,根据文件内容执行相应的功能;
2)、当一些关键进程死亡时,重启该进程;
3)、提供Android系统的属性服务;
int main(int argc, char **argv)
{
int fd_count = 0;
struct pollfd ufds[4];
char *tmpdev;
char* debuggable;
char tmp[32];
int property_set_fd_init = 0;
int signal_fd_init = 0;
int keychord_fd_init = 0;
bool is_charger = false;
if (!strcmp(basename(argv[0]), "ueventd"))
return ueventd_main(argc, argv);
/* clear the umask */
umask(0);
//挂载tmpfs,devpts,proc,sysfs 4类文件系统
mkdir("/dev", 0755);
mkdir("/proc", 0755);
mkdir("/sys", 0755);
mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755");
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0, NULL);
mount("proc", "/proc", "proc", 0, NULL);
mount("sysfs", "/sys", "sysfs", 0, NULL);
/* indicate that booting is in progress to background fw loaders, etc */
close(open("/dev/.booting", O_WRONLY | O_CREAT, 0000));
//屏蔽标准的输入输出,即标准的输入输出定向到NULL设备。
open_devnull_stdio();
// log 初始化
klog_init();
// 属性存储空间初始化
property_init();
//读取机器硬件名称
get_hardware_name(hardware, &revision);
//设置基本属性
process_kernel_cmdline();
#ifdef HAVE_SELINUX
INFO("loading selinux policy\n");
selinux_load_policy();
#endif
//判断当前启动模式
is_charger = !strcmp(bootmode, "charger");
INFO("property init\n");
if (!is_charger)
//读取默认的属性文件
property_load_boot_defaults();
//解析init.rc文件
INFO("reading config file\n");
init_parse_config_file("/init.rc");
//将early-init动作添加到链表action_queue中
action_for_each_trigger("early-init", action_add_queue_tail);
//创建wait_for_coldboot_done 动作并添加到链表action_queue和action_list中
queue_builtin_action(wait_for_coldboot_done_action, "wait_for_coldboot_done");
//创建keychord_init动作并添加到链表action_queue和action_list中
queue_builtin_action(keychord_init_action, "keychord_init");
//创建console_init动作并添加到链表action_queue和action_list中
queue_builtin_action(console_init_action, "console_init");
//将init动作添加到链表action_queue中
action_for_each_trigger("init", action_add_queue_tail);
//将early-fs动作添加到链表action_queue中
action_for_each_trigger("early-fs", action_add_queue_tail);
//将fs动作添加到链表action_queue中
action_for_each_trigger("fs", action_add_queue_tail);
//将post-fs动作添加到链表action_queue中
action_for_each_trigger("post-fs", action_add_queue_tail);
//非充电模式下,将post-fs-data动作添加到链表action_queue中
if (!is_charger) {
action_for_each_trigger("post-fs-data", action_add_queue_tail);
}
//创建property_service_init动作并添加到链表action_queue和action_list中
queue_builtin_action(property_service_init_action, "property_service_init");
//创建signal_init动作并添加到链表action_queue和action_list中
queue_builtin_action(signal_init_action, "signal_init");
//创建check_startup动作并添加到链表action_queue和action_list中
queue_builtin_action(check_startup_action, "check_startup");
if (!strcmp(bootmode, "alarm")) {
action_for_each_trigger("alarm", action_add_queue_tail);
}
if (is_charger) {
//充电模式下,将charger动作添加到链表action_queue中
action_for_each_trigger("charger", action_add_queue_tail);
} else {
//非充电模式下,将early-boot、boot动作添加到链表action_queue中
action_for_each_trigger("early-boot", action_add_queue_tail);
action_for_each_trigger("boot", action_add_queue_tail);
}
//创建queue_property_triggers动作并添加到链表action_queue和action_list中
queue_builtin_action(queue_property_triggers_action, "queue_property_triggers");
#if BOOTCHART
//如果BOOTCHART宏定义了,创建bootchart_init动作并添加到链表action_queue和action_list中
queue_builtin_action(bootchart_init_action, "bootchart_init");
#endif
for(;;) {
int nr, i, timeout = -1;
//按序执行action_queue里的action
execute_one_command();
//重启一些关键进程
restart_processes();
//添加事件句柄到句柄次
if (!property_set_fd_init && get_property_set_fd() > 0) {
ufds[fd_count].fd = get_property_set_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
property_set_fd_init = 1;
}
if (!signal_fd_init && get_signal_fd() > 0) {
ufds[fd_count].fd = get_signal_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
signal_fd_init = 1;
}
if (!keychord_fd_init && get_keychord_fd() > 0) {
ufds[fd_count].fd = get_keychord_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
keychord_fd_init = 1;
}
//计算超时时间
if (process_needs_restart) {
timeout = (process_needs_restart - gettime()) * 1000;
if (timeout < 0)
timeout = 0;
}
if (!action_queue_empty() || cur_action)
timeout = 0;
#if BOOTCHART
if (bootchart_count > 0) {
if (timeout < 0 || timeout > BOOTCHART_POLLING_MS)
timeout = BOOTCHART_POLLING_MS;
if (bootchart_step() < 0 || --bootchart_count == 0) {
bootchart_finish();
bootchart_count = 0;
}
}
#endif
//监控句柄池中的事件
nr = poll(ufds, fd_count, timeout);
if (nr <= 0)
continue;
//事件处理
for (i = 0; i < fd_count; i++) {
if (ufds[i].revents == POLLIN) {
if (ufds[i].fd == get_property_set_fd())
handle_property_set_fd();
else if (ufds[i].fd == get_keychord_fd())
handle_keychord();
else if (ufds[i].fd == get_signal_fd())
handle_signal();
}
}
}
return 0;
}
文件系统简介
tmpfs文件系统
tmpfs是一种虚拟内存文件系统,因此它会将所有的文件存储在虚拟内存中,并且tmpfs下的所有内容均为临时性的内容,如果你将tmpfs文件系统卸载后,那么其下的所有的内容将不复存在。tmpfs是一个独立的文件系统,不是块设备,只要挂接,立即就可以使用。
devpts文件系统
devpts文件系统为伪终端提供了一个标准接口,它的标准挂接点是/dev/pts。只要pty的主复合设备/dev/ptmx被打开,就会在/dev/pts下动态的创建一个新的pty设备文件。
proc文件系统
proc文件系统是一个非常重要的虚拟文件系统,它可以看作是内核内部数据结构的接口,通过它我们可以获得系统的信息,同时也能够在运行时修改特定的内核参数。
sysfs文件系统
与proc文件系统类似,sysfs文件系统也是一个不占有任何磁盘空间的虚拟文件系统。它通常被挂接在/sys目录下。sysfs文件系统是Linux2.6内核引入的,它把连接在系统上的设备和总线组织成为一个分级的文件,使得它们可以在用户空间存取。
屏蔽标准的输入输出
void open_devnull_stdio(void)
{
int fd;
//创建一个字符专用文件/dev/__null__
static const char *name = "/dev/__null__";
if (mknod(name, S_IFCHR | 0600, (1 << 8) | 3) == 0) {
//获取/dev/__null__的文件描述符,并输出该文件
fd = open(name, O_RDWR);
unlink(name);
if (fd >= 0) {
//将与进程相关的标准输入(0),标准输出(1),标准错误输出(2),均定向到NULL设备
dup2(fd, 0);
dup2(fd, 1);
dup2(fd, 2);
if (fd > 2) {
close(fd);
}
return;
}
}
exit(1);
}将标准输入输出,错误输出重定向到/dev/_null_设备中
初始化内核log系统
void klog_init(void)
{
static const char *name = "/dev/__kmsg__";
//创建/dev/__kmsg__设备节点
if (mknod(name, S_IFCHR | 0600, (1 << 8) | 11) == 0) {
klog_fd = open(name, O_WRONLY);
//当进程在进行exec系统调用时,要确保log_fd是关闭的
fcntl(klog_fd, F_SETFD, FD_CLOEXEC);
unlink(name);
}
}
属性存储空间初始化
void property_init(void)
{
init_property_area();
}关于Android的属性系统,请查看Android 系统属性SystemProperty分析一文,在这篇文章中详细分析了Android的属性系统。
读取机器硬件名称
从/proc/cpuinfo中获取“Hardware”字段信息写入<hw>;“Reversion” 字段信息写入<reversion>
void get_hardware_name(char *hardware, unsigned int *revision)
{
char data[1024];
int fd, n;
char *x, *hw, *rev;
/* Hardware string was provided on kernel command line */
if (hardware[0])
return;
//打开/proc/cpuinfo文件
fd = open("/proc/cpuinfo", O_RDONLY);
if (fd < 0) return;
//读取/proc/cpuinfo文件内容
n = read(fd, data, 1023);
close(fd);
if (n < 0) return;
data[n] = 0;
hw = strstr(data, "\nHardware");
rev = strstr(data, "\nRevision");
if (hw) {
x = strstr(hw, ": ");
if (x) {
x += 2;
n = 0;
while (*x && *x != '\n') {
if (!isspace(*x))
hardware[n++] = tolower(*x);
x++;
if (n == 31) break;
}
hardware[n] = 0;
}
}
if (rev) {
x = strstr(rev, ": ");
if (x) {
*revision = strtoul(x + 2, 0, 16);
}
}
}get_hardware_name函数从/proc/cpuinfo文件中读取硬件名称等信息,/proc/cpuinfo文件内容如下:
Processor : ARMv7 Processor rev 1 (v7l)
BogoMIPS : 1024.00
Features : swp half thumb fastmult vfp edsp thumbee neon vfpv3
CPU implementer : 0x41
CPU architecture: 7
CPU variant : 0x0
CPU part : 0xc05
CPU revision : 1
Hardware : sc7710g
Revision : 0000
Serial : 0000000000000000
设置命令行参数属性
static void process_kernel_cmdline(void)
{
/* don't expose the raw commandline to nonpriv processes */
chmod("/proc/cmdline", 0440);
/* first pass does the common stuff, and finds if we are in qemu.
* second pass is only necessary for qemu to export all kernel params
* as props.
*/
import_kernel_cmdline(0, import_kernel_nv);
if (qemu[0])
import_kernel_cmdline(1, import_kernel_nv);
/* now propogate the info given on command line to internal variables
* used by init as well as the current required properties
*/
export_kernel_boot_props();
}process_kernel_cmdline函数首先修改/proc/cmdline文件权限,然后调用import_kernel_cmdline函数来读取/proc/cmdline文件的内容,并查找格式为:<key> = <value> 的字串,调用import_kernel_nv函数来设置属性。函数export_kernel_boot_props()用于设置内核启动时需要的属性。
void import_kernel_cmdline(int in_qemu,void (*import_kernel_nv)(char *name, int in_qemu))
{
char cmdline[1024];
char *ptr;
int fd;
//打开并读取/proc/cmdline文件
fd = open("/proc/cmdline", O_RDONLY);
if (fd >= 0) {
int n = read(fd, cmdline, 1023);
if (n < 0) n = 0;
/* get rid of trailing newline, it happens */
if (n > 0 && cmdline[n-1] == '\n') n--;
cmdline[n] = 0;
close(fd);
} else {
cmdline[0] = 0;
}
ptr = cmdline;
while (ptr && *ptr) {
char *x = strchr(ptr, ' ');
if (x != 0) *x++ = 0;
//回调import_kernel_nv函数,in_qemu =0
import_kernel_nv(ptr, in_qemu);
ptr = x;
}
}/proc/cmdline文件内容如下:
initrd=0x4c00000,0x1118e8 lpj=3350528 apv="sp7710ga-userdebug 4.1.2 JZO54K W13.23.2-010544 test-keys" mem=256M init=/init mtdparts=sprd-nand:256k(spl),512k(2ndbl),256k(params),512k(vmjaluna),10m(modem),3840k(fixnv),3840k(backupfixnv),5120k(dsp),3840k(runtimenv),10m(boot),10m(recovery),260m(system),160m(userdata),20m(cache),256k(misc),1m(boot_logo),1m(fastboot_logo),3840k(productinfo),512k(kpanic),15m(firmware) console=null lcd_id=ID18 ram=256M
static void import_kernel_nv(char *name, int for_emulator)
{
char *value = strchr(name, '=');
int name_len = strlen(name);
if (value == 0) return;
*value++ = 0;
if (name_len == 0) return;
#ifdef HAVE_SELINUX
if (!strcmp(name,"enforcing")) {
selinux_enforcing = atoi(value);
} else if (!strcmp(name,"selinux")) {
selinux_enabled = atoi(value);
}
#endif
//判断是否为模拟器
if (for_emulator) {
/* in the emulator, export any kernel option with the
* ro.kernel. prefix */
char buff[PROP_NAME_MAX];
int len = snprintf( buff, sizeof(buff), "ro.kernel.%s", name );
if (len < (int)sizeof(buff))
property_set( buff, value );
return;
}
//如果/proc/cmdline文件中有qemu关键字
if (!strcmp(name,"qemu")) {
strlcpy(qemu, value, sizeof(qemu));
//如果/proc/cmdline文件中有以androidboot.开头的关键字
} else if (!strncmp(name, "androidboot.", 12) && name_len > 12) {
const char *boot_prop_name = name + 12;
char prop[PROP_NAME_MAX];
int cnt;
//格式化为ro.boot.xx 属性
cnt = snprintf(prop, sizeof(prop), "ro.boot.%s", boot_prop_name);
if (cnt < PROP_NAME_MAX)
property_set(prop, value);
}
}最后调用函数export_kernel_boot_props设置内核启动属性
static void export_kernel_boot_props(void)
{
char tmp[PROP_VALUE_MAX];
const char *pval;
unsigned i;
//属性表
struct {
const char *src_prop;
const char *dest_prop;
const char *def_val;
} prop_map[] = {
{ "ro.boot.serialno", "ro.serialno", "", },
{ "ro.boot.mode", "ro.bootmode", "unknown", },
{ "ro.boot.baseband", "ro.baseband", "unknown", },
{ "ro.boot.bootloader", "ro.bootloader", "unknown", },
};
//循环读取ro.boot.xxx属性值,并设置ro.xxx属性
for (i = 0; i < ARRAY_SIZE(prop_map); i++) {
pval = property_get(prop_map[i].src_prop);
property_set(prop_map[i].dest_prop, pval ?: prop_map[i].def_val);
}
//读取ro.boot.console属性值
pval = property_get("ro.boot.console");
if (pval)
strlcpy(console, pval, sizeof(console));
//读取ro.bootmode属性值
strlcpy(bootmode, property_get("ro.bootmode"), sizeof(bootmode));
//读取ro.boot.hardware属性值
pval = property_get("ro.boot.hardware");
if (pval)
strlcpy(hardware, pval, sizeof(hardware));
//设置ro.hardware属性
property_set("ro.hardware", hardware);
//设置ro.revision属性
snprintf(tmp, PROP_VALUE_MAX, "%d", revision);
property_set("ro.revision", tmp);
//设置ro.factorytest属性
if (!strcmp(bootmode,"factory"))
property_set("ro.factorytest", "1");
else if (!strcmp(bootmode,"factory2"))
property_set("ro.factorytest", "2");
else
property_set("ro.factorytest", "0");
}
init.rc 文件解析
init_parse_config_file(const char *fn)
{
char *data;
//读取/init.rc文件内容
data = read_file(fn, 0);
if (!data) return -1;
//解析读取到的文件内容
parse_config(fn, data);
DUMP();
return 0;
}函数首先调用read_file函数将init.rc文件的内容读取保存到data中,在调用parse_config对其进行解析
void *read_file(const char *fn, unsigned *_sz)
{
char *data;
int sz;
int fd;
struct stat sb;
data = 0;
//打开/init.rc文件
fd = open(fn, O_RDONLY);
if(fd < 0) return 0;
// for security reasons, disallow world-writable
// or group-writable files
if (fstat(fd, &sb) < 0) {
ERROR("fstat failed for '%s'\n", fn);
goto oops;
}
if ((sb.st_mode & (S_IWGRP | S_IWOTH)) != 0) {
ERROR("skipping insecure file '%s'\n", fn);
goto oops;
}
//将文件指针移到文件尾部,得到文件内容长度
sz = lseek(fd, 0, SEEK_END);
if(sz < 0) goto oops;
if(lseek(fd, 0, SEEK_SET) != 0) goto oops;
//分配buffer
data = (char*) malloc(sz + 2);
if(data == 0) goto oops;
//读取文件
if(read(fd, data, sz) != sz) goto oops;
close(fd);
data[sz] = '\n';
data[sz+1] = 0;
if(_sz) *_sz = sz;
return data;
oops:
close(fd);
if(data != 0) free(data);
return 0;
}
init.rc文件语法介绍
在Android根文件系统下存在多个.rc文件,该文件为Android启动配置脚本文件,文件内容如下:
# Copyright (C) 2012 The Android Open Source Project
#
# IMPORTANT: Do not create world writable files or directories.
# This is a common source of Android security bugs.
#
import /init.${ro.hardware}.rc
import /init.usb.rc
import /init.trace.rc
on early-init
# Set init and its forked children's oom_adj.
write /proc/1/oom_adj -16
start ueventd
mkdir /mnt 0775 root system
on init
sysclktz 0
loglevel 3
# setup the global environment
export PATH /sbin:/vendor/bin:/system/sbin:/system/bin:/system/xbin
export LD_LIBRARY_PATH /vendor/lib:/system/lib
export ANDROID_BOOTLOGO 1
export ANDROID_ROOT /system
export ANDROID_ASSETS /system/app
export ANDROID_DATA /data
export ASEC_MOUNTPOINT /mnt/asec
export LOOP_MOUNTPOINT /mnt/obb
export BOOTCLASSPATH /system/framework/core.jar:/system/framework/core-junit.jar:/system/framework/bouncycastle.jar:/system/framework/ext.jar:/system/framework/framework.jar:/system/framework/framework2.jar:/system/framework/android.policy.jar:/system/framework/services.jar:/system/framework/apache-xml.jar
# Backward compatibility
symlink /system/etc /etc
symlink /sys/kernel/debug /d
# Right now vendor lives on the same filesystem as system,
# but someday that may change.
symlink /system/vendor /vendor
# Create cgroup mount point for cpu accounting
mkdir /acct
mount cgroup none /acct cpuacct
mkdir /acct/uid
mkdir /system
mkdir /data 0771 system system
mkdir /cache 0770 system cache
mkdir /runtimenv 0774 system system
mkdir /backupfixnv 0774 system system
mkdir /productinfo 0774 system system
mkdir /fixnv 0774 system system
mkdir /config 0500 root root
# Create cgroup mount points for process groups
mkdir /dev/cpuctl
mount cgroup none /dev/cpuctl cpu
chown system system /dev/cpuctl
chown system system /dev/cpuctl/tasks
chmod 0660 /dev/cpuctl/tasks
write /dev/cpuctl/cpu.shares 1024
write /dev/cpuctl/cpu.rt_runtime_us 950000
write /dev/cpuctl/cpu.rt_period_us 1000000
mkdir /dev/cpuctl/apps
chown system system /dev/cpuctl/apps/tasks
chmod 0666 /dev/cpuctl/apps/tasks
write /dev/cpuctl/apps/cpu.shares 1024
write /dev/cpuctl/apps/cpu.rt_runtime_us 800000
write /dev/cpuctl/apps/cpu.rt_period_us 1000000
on fs
# mount mtd partitions
# Mount /system rw first to give the filesystem a chance to save a checkpoint
chmod 0744 /modem_control
start modem_control
mount yaffs2 mtd@system /system
mount yaffs2 mtd@system /system ro remount
mount yaffs2 mtd@userdata /data nosuid nodev
mount yaffs2 mtd@cache /cache nosuid nodev
on post-fs
# once everything is setup, no need to modify /
mount rootfs rootfs / ro remount
mount yaffs2 mtd@fixnv /fixnv nosuid nodev no-checkpoint
chown system system /fixnv
chmod 0774 /fixnv
mount yaffs2 mtd@runtimenv /runtimenv nosuid nodev no-checkpoint
chown system system /runtimenv
chmod 0774 /runtimenv
# We chown/chmod /cache again so because mount is run as root + defaults
chown system cache /cache
chmod 0770 /cache
mount yaffs2 mtd@backupfixnv /backupfixnv nosuid nodev no-checkpoint
chown system system /backupfixnv
chmod 0774 /backupfixnv
mount yaffs2 mtd@productinfo /productinfo nosuid nodev no-checkpoint
chown system system /productinfo
chmod 0774 /productinfo
chmod 0660 /fixnv/fixnv.bin
chmod 0660 /backupfixnv/fixnv.bin
chmod 0660 /productinfo/productinfo.bin
chmod 0660 /productinfo/productinfobkup.bin
chown system system /fixnv/fixnv.bin
chown system system /backupfixnv/fixnv.bin
chown system system /productinfo/productinfo.bin
chown system system /productinfo/productinfobkup.bin
# This may have been created by the recovery system with odd permissions
chown system cache /cache/recovery
chmod 0770 /cache/recovery
#change permissions on vmallocinfo so we can grab it from bugreports
chown root log /proc/vmallocinfo
chmod 0440 /proc/vmallocinfo
#change permissions on kmsg & sysrq-trigger so bugreports can grab kthread stacks
chown root system /proc/kmsg
chmod 0440 /proc/kmsg
chown root system /proc/sysrq-trigger
chmod 0220 /proc/sysrq-trigger
# create the lost+found directories, so as to enforce our permissions
mkdir /cache/lost+found 0770 root root
on post-fs-data
# create basic filesystem structure
mkdir /data/misc 01771 system misc
mkdir /data/misc/bluetoothd 0770 bluetooth bluetooth
mkdir /data/misc/bluetooth 0770 system system
mkdir /data/misc/keystore 0700 keystore keystore
mkdir /data/misc/keychain 0771 system system
mkdir /data/misc/vpn 0770 system vpn
mkdir /data/misc/systemkeys 0700 system system
on boot
# basic network init
ifup lo
hostname localhost
domainname localdomain
# set RLIMIT_NICE to allow priorities from 19 to -20
setrlimit 13 40 40
# Memory management. Basic kernel parameters, and allow the high
# level system server to be able to adjust the kernel OOM driver
# parameters to match how it is managing things.
write /proc/sys/vm/overcommit_memory 1
write /proc/sys/vm/min_free_order_shift 4
chown root system /sys/module/lowmemorykiller/parameters/adj
# Tweak background writeout
write /proc/sys/vm/dirty_expire_centisecs 200
write /proc/sys/vm/dirty_background_ratio 5
class_start core
class_start main
on nonencrypted
class_start late_start
on charger
class_start core
class_start charger
on alarm
insmod /system/lib/modules/ft5306_ts.ko
class_start core
start media
exec /bin/poweroff_alarm
on property:vold.decrypt=trigger_reset_main
class_reset main
on property:vold.decrypt=trigger_load_persist_props
load_persist_props
on property:vold.decrypt=trigger_post_fs_data
trigger post-fs-data
on property:vold.decrypt=trigger_restart_min_framework
class_start main
on property:vold.decrypt=trigger_restart_framework
class_start main
class_start late_start
on property:vold.decrypt=trigger_shutdown_framework
class_reset late_start
class_reset main
## Daemon processes to be run by init.
##
service ueventd /sbin/ueventd
class core
critical
service console /system/bin/sh
class core
console
disabled
user shell
group log
on property:ro.debuggable=1
start console
# adbd is controlled via property triggers in init.<platform>.usb.rc
service adbd /sbin/adbd
class core
disabled
# adbd on at boot in emulator
on property:ro.kernel.qemu=1
start adbd
# This property trigger has added to imitiate the previous behavior of "adb root".
# The adb gadget driver used to reset the USB bus when the adbd daemon exited,
# and the host side adb relied on this behavior to force it to reconnect with the
# new adbd instance after init relaunches it. So now we force the USB bus to reset
# here when adbd sets the service.adb.root property to 1. We also restart adbd here
# rather than waiting for init to notice its death and restarting it so the timing
# of USB resetting and adb restarting more closely matches the previous behavior.
on property:service.adb.root=1
write /sys/class/android_usb/android0/enable 0
restart adbd
write /sys/class/android_usb/android0/enable 1
service servicemanager /system/bin/servicemanager
class core
user system
group system
critical
onrestart restart zygote
onrestart restart media
onrestart restart surfaceflinger
onrestart restart drm
service vold /system/bin/vold
class core
socket vold stream 0660 root mount
ioprio be 2
service netd /system/bin/netd
class main
socket netd stream 0660 root system
socket dnsproxyd stream 0660 root inet
socket mdns stream 0660 root system
service debuggerd /system/bin/debuggerd
class main
#service ril-daemon /system/bin/rild
# class main
# socket rild stream 660 root radio
# socket rild-debug stream 660 radio system
# user root
# group radio cache inet misc audio sdcard_r sdcard_rw log
service surfaceflinger /system/bin/surfaceflinger
class main
user system
group graphics
onrestart restart zygote
service zygote /system/bin/app_process -Xzygote /system/bin --zygote --start-system-server
class main
socket zygote stream 660 root system
onrestart write /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestart restart media
onrestart restart netd
service bootanim /system/bin/bootanimation
class main
user graphics
group graphics
disabled
oneshot
service dbus /system/bin/dbus-daemon --system --nofork
class main
socket dbus stream 660 bluetooth bluetooth
user bluetooth
group bluetooth net_bt_admin
service bluetoothd /system/bin/bluetoothd -n
class main
socket bluetooth stream 660 bluetooth bluetooth
socket dbus_bluetooth stream 660 bluetooth bluetooth
# init.rc does not yet support applying capabilities, so run as root and
# let bluetoothd drop uid to bluetooth with the right linux capabilities
group bluetooth net_bt_admin misc
disabled
service installd /system/bin/installd
class main
socket installd stream 600 system system
service flash_recovery /system/etc/install-recovery.sh
class main
oneshot
service racoon /system/bin/racoon
class main
socket racoon stream 600 system system
# IKE uses UDP port 500. Racoon will setuid to vpn after binding the port.
group vpn net_admin inet
disabled
oneshot
service mtpd /system/bin/mtpd
class main
socket mtpd stream 600 system system
user vpn
group vpn net_admin inet net_raw
disabled
oneshot
service keystore /system/bin/keystore /data/misc/keystore
class main
user keystore
group keystore drmrpc
socket keystore stream 666
init.rc是一个可配置的初始化文件,通常定制厂商可以配置额外的初始化配置,如果关键字中有空格,处理方法类似于C语言,使用/表示转义,使用“”防止关键字被断开,另外注意/在末尾表示换行,由 # (前面允许有空格)开始的行都是注释行。init.rc包含4种状态类别:Actions/Commands/Services/Options。当声明一个service或者action的时候,它将隐式声明一个section,它之后跟随的command或者option都将属于这个section,action和service不能重名,否则忽略为error。
Action
actions就是在某种条件下触发一系列的命令,通常有一个trigger,形式如:
on <trigger>
<command>
<command>
trigger主要包括:
boot 当/init.conf加载完毕时
<name>=<value> 当<name>被设置为<value>时
device-added-<path> 设备<path>被添加时
device-removed-<path> 设备<path>被移除时
service-exited-<name> 服务<name>退出时
Service
service就是要启动的本地服务进程
service <name> <pathname> [ <argument> ]*
<option>
<option>
Option
option是service的修饰词,由它来指定何时并且如何启动Services程序,主要包括:
critical 表示如果服务在4分钟内存在多于4次,则系统重启到recovery mode
disabled 表示服务不会自动启动,需要手动调用名字启动
setEnv <name> <value> 设置启动环境变量
socket <name> <type> <permission> [<user> [<group>]] 开启一个unix域的socket,名字为/dev/socket/<name> , <type>只能是dgram或者stream,<user>和<group>默认为0
user <username> 表示将用户切换为<username>,用户名已经定义好了,只能是system/root
group <groupname> 表示将组切换为<groupname>
oneshot 表示这个service只启动一次
class <name> 指定一个要启动的类,这个类中如果有多个service,将会被同时启动。默认的class将会是“default”
onrestart 在重启时执行一条命令
Command
comand主要包括:
exec <path> [ <argument> ]*执行一个<path>指定的程序
export <name> <value> 设置一个全局变量
ifup <interface> 使网络接口<interface>连接
import <filename> 引入其他的配置文件
hostname <name> 设置主机名
chdir <directory> 切换工作目录
chmod <octal-mode> <path> 设置访问权限
chown <owner> <group> <path> 设置用户和组
chroot <directory> 设置根目录
class_start <serviceclass> 启动类中的service
class_stop <serviceclass> 停止类中的service
domainname <name> 设置域名
insmod <path> 安装模块
mkdir <path> [mode] [owner] [group] 创建一个目录,并可以指定权限,用户和组
mount <type> <device> <dir> [ <mountoption> ]* 加载指定设备到目录下<mountoption> 包括"ro", "rw", "remount", "noatime"
setprop <name> <value> 设置系统属性
setrlimit <resource> <cur> <max> 设置资源访问权限
start <service> 开启服务
stop <service> 停止服务
symlink <target> <path> 创建一个动态链接
sysclktz <mins_west_of_gmt> 设置系统时钟
trigger <event> 触发事件
write <path> <string> [ <string> ]* 向<path>路径的文件写入多个<string>
Properties(属性)
Init更新一些系统属性以提供对正在发生的事件的监控能力:
init.action 此属性值为正在被执行的action的名字,如果没有则为""。
init.command 此属性值为正在被执行的command的名字,如果没有则为""。
init.svc.<name> 名为<name>的service的状态("stopped"(停止), "running"(运行), "restarting"(重启))
在默认情况下,程序在被init执行时会将标准输出和标准错误都重定向到/dev/null(丢弃)。若你想要获得调试信息,你可以通过Andoird系统中的logwrapper程序执行你的程序。它会将标准输出/标准错误都重定向到Android日志系统(通过logcat访问)。
例如:
service akmd /system/bin/logwrapper /sbin/akmd
init.rc解析过程
1. 扫描init.rc中的token
找到其中的 文件结束EOF/文本TEXT/新行NEWLINE,其中的空格‘ ’、‘\t’、‘\r’会被忽略,#开头的行也被忽略掉;而对于TEXT,空格‘ ’、‘\t’、‘\r’、‘\n’都是TEXT的结束标志。
2. 对每一个TEXT token,都加入到args[]数组中
3. 当遇到新一行(‘\n’)的时候,用args[0]通过lookup_keyword()检索匹配关键字;
1) 对Section(on和service),调用parse_new_section() 解析:
- 对on section,调用parse_action(),并设置解析函数parse_line为parse_line_action()
- 对service section,调用parse_service(),并设置解析函数parse_line为parse_line_service()
2) 对其他关键字的行(非on或service开头的地方,也就是没有切换section)调用parse_line()
- 对于on section内的命令行,调用parse_line_action()解析;
- 对于service section内的命令行,调用parse_line_service()解析。
Token的定义
#define T_EOF 0
#define T_TEXT 1
#define T_NEWLINE 2解析过程中的双向循环链表的使用,android用到了一个非常巧妙的链表实现方法,一般情况下如果链表的节点是一个单独的数据结构的话,那么针对不同的数据结构,都需要定义不同链表操作。而在初始化过程中使用到的链表则解决了这个问题,它将链表的节点定义为了一个非常精简的结构,只包含前向和后向指针,那么在定义不同的数据结构时,只需要将链表节点嵌入到数据结构中即可。链表节点定义如下:
struct listnode
{
struct listnode *next;
struct listnode *prev;
};
对于Action数据结构为例:
struct action {
/* node in list of all actions */
struct listnode alist;
/* node in the queue of pending actions */
struct listnode qlist;
/* node in list of actions for a trigger */
struct listnode tlist;
unsigned hash;
const char *name;
struct listnode commands;
struct command *current;
};
这样的话,所有的链表的基本操作,例如插入,删除等只会针对listnode进行操作,而不是针对特定的数据结构,链表的实现得到了统一,即精简了代码,又提高了效率。 但是这样的链表实现,存在一个问题,链表节点listnode中只有前向和后向指针,并且前向和后向指针均指向listnode,那么我们通过什么方式来访问数据结构action的内容呢?我们使用offsetof宏来计算链表节点在数据结构中的偏移量,从而计算数据结构实例的地址。
#define offsetof(TYPE, MEMBER) ((size_t) &((TYPE *)0)->MEMBER)
#define node_to_item(node, container, member) \
(container *) (((char*) (node)) - offsetof(container, member))这种链表的优点:(1)所有链表基本操作都是基于listnode指针的,因此添加类型时,不需要重复写链表基本操作函数(2)一个container数据结构可以含有多个listnode成员,这样就可以同时挂到多个不同的链表中。
Service数据结构定义:
struct service {
/* list of all services */
struct listnode slist;
const char *name;
const char *classname;
unsigned flags;
pid_t pid;
time_t time_started; /* time of last start */
time_t time_crashed; /* first crash within inspection window */
int nr_crashed; /* number of times crashed within window */
uid_t uid;
gid_t gid;
gid_t supp_gids[NR_SVC_SUPP_GIDS];
size_t nr_supp_gids;
#ifdef HAVE_SELINUX
char *seclabel;
#endif
struct socketinfo *sockets;
struct svcenvinfo *envvars;
struct action onrestart; /* Actions to execute on restart. */
/* keycodes for triggering this service via /dev/keychord */
int *keycodes;
int nkeycodes;
int keychord_id;
int ioprio_class;
int ioprio_pri;
int nargs;
/* "MUST BE AT THE END OF THE STRUCT" */
char *args[1];
};对于某些Service可能采用Socket来实现进程间通信,因此该Service需要创建多个socket,比如:
service wril-daemon /system/bin/rild_sp -l /system/lib/libreference-ril_sp.so -m w -n 0
class core
socket rild stream 660 root radio
socket rild-debug stream 660 radio system
disabled
user root
group radio cache inet misc audio sdcard_rw log
该service需要创建rild 和rild-debug socket,这些socket的信息在解析init.rc文件时保存在Service的成员变量sockets链表中。socketinfo 数据结构定义如下:
struct socketinfo {
struct socketinfo *next;
const char *name;
const char *type;
uid_t uid;
gid_t gid;
int perm;
};
某些Service在运行时需要设置环境变量,这些环境变量被保存在Service的成员变量envvars链表中,svcenvinfo 数据结构定义如下:
struct svcenvinfo {
struct svcenvinfo *next;
const char *name;
const char *value;
};在每个Action或Service下可能需要执行多个Command,关于command数据结构定义如下:
struct command
{
/* list of commands in an action */
struct listnode clist;
int (*func)(int nargs, char **args);
int nargs;
char *args[1];
};
在Init进程中分别使用了3个链表来存储init.rc文件中的Action和Service:
static list_declare(service_list);
static list_declare(action_list);
static list_declare(action_queue);service_list链表用于保存init.rc文件中的Service配置信息,service_list链表的存储如下图所示:
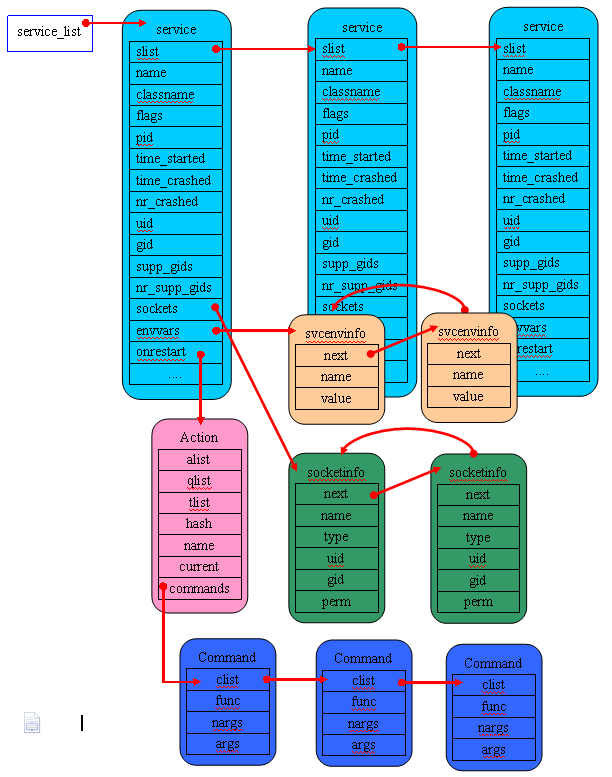
service_list 链表保存init.rc文件中的所有service,每个service下的所有socket信息保存在该service的成员变量sockets链表中,当该service重启时,需要重启某些服务,对于重启某些服务的命令以Action的形式保存在Service的成员变量onrestart链表中,而真正执行的命令却存放在该Action下的commands链表里。
action_list用于保存init.rc文件中的所有以on开头的section,action_list链表的存储如下图所示:
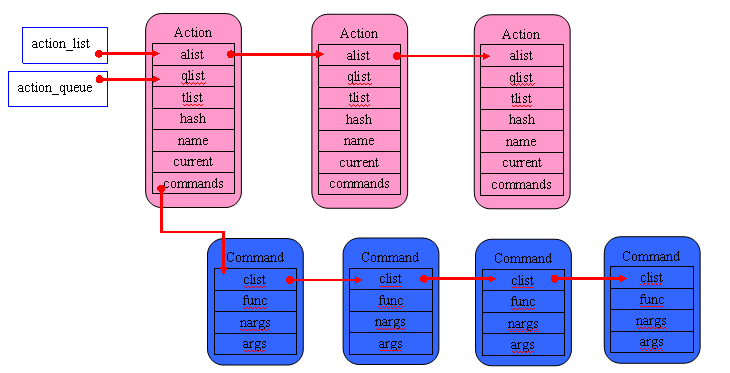
从上图可以看出action_queue和action_list都是用来保存所有的Action,它们之间的区别是action_list用于保存从init.rc中解析出来的所有Action,而action_queue却是用于保存待执行的Action,action_queue是一个待执行队列。
在system\core\init\keywords.h文件中定义了解析关键字,其内容如下:
#ifndef KEYWORD
int do_chroot(int nargs, char **args);
int do_chdir(int nargs, char **args);
int do_class_start(int nargs, char **args);
int do_class_stop(int nargs, char **args);
int do_class_reset(int nargs, char **args);
int do_domainname(int nargs, char **args);
int do_exec(int nargs, char **args);
int do_export(int nargs, char **args);
int do_hostname(int nargs, char **args);
int do_ifup(int nargs, char **args);
int do_insmod(int nargs, char **args);
int do_mkdir(int nargs, char **args);
int do_mount_all(int nargs, char **args);
int do_mount(int nargs, char **args);
int do_restart(int nargs, char **args);
int do_restorecon(int nargs, char **args);
int do_rm(int nargs, char **args);
int do_rmdir(int nargs, char **args);
int do_setcon(int nargs, char **args);
int do_setenforce(int nargs, char **args);
int do_setkey(int nargs, char **args);
int do_setprop(int nargs, char **args);
int do_setrlimit(int nargs, char **args);
int do_setsebool(int nargs, char **args);
int do_start(int nargs, char **args);
int do_stop(int nargs, char **args);
int do_trigger(int nargs, char **args);
int do_symlink(int nargs, char **args);
int do_sysclktz(int nargs, char **args);
int do_write(int nargs, char **args);
int do_copy(int nargs, char **args);
int do_chown(int nargs, char **args);
int do_chmod(int nargs, char **args);
int do_loglevel(int nargs, char **args);
int do_load_persist_props(int nargs, char **args);
int do_pipe(int nargs, char **args);
int do_wait(int nargs, char **args);
#define __MAKE_KEYWORD_ENUM__
#define KEYWORD(symbol, flags, nargs, func) K_##symbol,
enum {
K_UNKNOWN,
#endif
KEYWORD(capability, OPTION, 0, 0)
KEYWORD(chdir, COMMAND, 1, do_chdir)
KEYWORD(chroot, COMMAND, 1, do_chroot)
KEYWORD(class, OPTION, 0, 0)
KEYWORD(class_start, COMMAND, 1, do_class_start)
KEYWORD(class_stop, COMMAND, 1, do_class_stop)
KEYWORD(class_reset, COMMAND, 1, do_class_reset)
KEYWORD(console, OPTION, 0, 0)
KEYWORD(critical, OPTION, 0, 0)
KEYWORD(disabled, OPTION, 0, 0)
KEYWORD(domainname, COMMAND, 1, do_domainname)
KEYWORD(exec, COMMAND, 1, do_exec)
KEYWORD(export, COMMAND, 2, do_export)
KEYWORD(group, OPTION, 0, 0)
KEYWORD(hostname, COMMAND, 1, do_hostname)
KEYWORD(ifup, COMMAND, 1, do_ifup)
KEYWORD(insmod, COMMAND, 1, do_insmod)
KEYWORD(import, SECTION, 1, 0)
KEYWORD(keycodes, OPTION, 0, 0)
KEYWORD(mkdir, COMMAND, 1, do_mkdir)
KEYWORD(mount_all, COMMAND, 1, do_mount_all)
KEYWORD(mount, COMMAND, 3, do_mount)
KEYWORD(on, SECTION, 0, 0)
KEYWORD(oneshot, OPTION, 0, 0)
KEYWORD(onrestart, OPTION, 0, 0)
KEYWORD(restart, COMMAND, 1, do_restart)
KEYWORD(restorecon, COMMAND, 1, do_restorecon)
KEYWORD(rm, COMMAND, 1, do_rm)
KEYWORD(rmdir, COMMAND, 1, do_rmdir)
KEYWORD(seclabel, OPTION, 0, 0)
KEYWORD(service, SECTION, 0, 0)
KEYWORD(setcon, COMMAND, 1, do_setcon)
KEYWORD(setenforce, COMMAND, 1, do_setenforce)
KEYWORD(setenv, OPTION, 2, 0)
KEYWORD(setkey, COMMAND, 0, do_setkey)
KEYWORD(setprop, COMMAND, 2, do_setprop)
KEYWORD(setrlimit, COMMAND, 3, do_setrlimit)
KEYWORD(setsebool, COMMAND, 1, do_setsebool)
KEYWORD(socket, OPTION, 0, 0)
KEYWORD(start, COMMAND, 1, do_start)
KEYWORD(stop, COMMAND, 1, do_stop)
KEYWORD(trigger, COMMAND, 1, do_trigger)
KEYWORD(symlink, COMMAND, 1, do_symlink)
KEYWORD(sysclktz, COMMAND, 1, do_sysclktz)
KEYWORD(user, OPTION, 0, 0)
KEYWORD(wait, COMMAND, 1, do_wait)
KEYWORD(write, COMMAND, 2, do_write)
KEYWORD(copy, COMMAND, 2, do_copy)
KEYWORD(chown, COMMAND, 2, do_chown)
KEYWORD(chmod, COMMAND, 2, do_chmod)
KEYWORD(loglevel, COMMAND, 1, do_loglevel)
KEYWORD(load_persist_props, COMMAND, 0, do_load_persist_props)
KEYWORD(pipe, COMMAND, 2, do_pipe)
KEYWORD(ioprio, OPTION, 0, 0)
#ifdef __MAKE_KEYWORD_ENUM__
KEYWORD_COUNT,
};
#undef __MAKE_KEYWORD_ENUM__
#undef KEYWORD
#endif宏KEYWORD并未定义,因此将定义宏__MAKE_KEYWORD_ENUM__ 及KEYWORD,KEYWORD宏定义如下:
#define KEYWORD(symbol, flags, nargs, func) K_##symbol,同时定义了枚举:
enum {
K_UNKNOWN,
KEYWORD(capability, OPTION, 0, 0)
KEYWORD(chdir, COMMAND, 1, do_chdir)
KEYWORD(chroot, COMMAND, 1, do_chroot)
KEYWORD(class, OPTION, 0, 0)
KEYWORD(class_start, COMMAND, 1, do_class_start)
KEYWORD(class_stop, COMMAND, 1, do_class_stop)
KEYWORD(class_reset, COMMAND, 1, do_class_reset)
KEYWORD(console, OPTION, 0, 0)
KEYWORD(critical, OPTION, 0, 0)
KEYWORD(disabled, OPTION, 0, 0)
KEYWORD(domainname, COMMAND, 1, do_domainname)
KEYWORD(exec, COMMAND, 1, do_exec)
KEYWORD(export, COMMAND, 2, do_export)
KEYWORD(group, OPTION, 0, 0)
KEYWORD(hostname, COMMAND, 1, do_hostname)
KEYWORD(ifup, COMMAND, 1, do_ifup)
KEYWORD(insmod, COMMAND, 1, do_insmod)
KEYWORD(import, SECTION, 1, 0)
KEYWORD(keycodes, OPTION, 0, 0)
KEYWORD(mkdir, COMMAND, 1, do_mkdir)
KEYWORD(mount_all, COMMAND, 1, do_mount_all)
KEYWORD(mount, COMMAND, 3, do_mount)
KEYWORD(on, SECTION, 0, 0)
KEYWORD(oneshot, OPTION, 0, 0)
KEYWORD(onrestart, OPTION, 0, 0)
KEYWORD(restart, COMMAND, 1, do_restart)
KEYWORD(restorecon, COMMAND, 1, do_restorecon)
KEYWORD(rm, COMMAND, 1, do_rm)
KEYWORD(rmdir, COMMAND, 1, do_rmdir)
KEYWORD(seclabel, OPTION, 0, 0)
KEYWORD(service, SECTION, 0, 0)
KEYWORD(setcon, COMMAND, 1, do_setcon)
KEYWORD(setenforce, COMMAND, 1, do_setenforce)
KEYWORD(setenv, OPTION, 2, 0)
KEYWORD(setkey, COMMAND, 0, do_setkey)
KEYWORD(setprop, COMMAND, 2, do_setprop)
KEYWORD(setrlimit, COMMAND, 3, do_setrlimit)
KEYWORD(setsebool, COMMAND, 1, do_setsebool)
KEYWORD(socket, OPTION, 0, 0)
KEYWORD(start, COMMAND, 1, do_start)
KEYWORD(stop, COMMAND, 1, do_stop)
KEYWORD(trigger, COMMAND, 1, do_trigger)
KEYWORD(symlink, COMMAND, 1, do_symlink)
KEYWORD(sysclktz, COMMAND, 1, do_sysclktz)
KEYWORD(user, OPTION, 0, 0)
KEYWORD(wait, COMMAND, 1, do_wait)
KEYWORD(write, COMMAND, 2, do_write)
KEYWORD(copy, COMMAND, 2, do_copy)
KEYWORD(chown, COMMAND, 2, do_chown)
KEYWORD(chmod, COMMAND, 2, do_chmod)
KEYWORD(loglevel, COMMAND, 1, do_loglevel)
KEYWORD(load_persist_props, COMMAND, 0, do_load_persist_props)
KEYWORD(pipe, COMMAND, 2, do_pipe)
KEYWORD(ioprio, OPTION, 0, 0)
KEYWORD_COUNT,
};该枚举的通过宏展开后定义为:
enum {
K_UNKNOWN,
K_capability,
K_chdir,
K_chroot,
K_class,
K_class_start,
K_class_stop,
K_class_reset,
K_console,
K_critical,
K_disabled,
K_domainname,
K_exec,
K_export,
K_group,
K_hostname,
K_ifup,
K_insmod,
K_import,
K_keycodes,
K_mkdir,
K_mount_all,
K_mount,
K_on,
K_oneshot,
K_onrestart,
K_restart,
K_restorecon,
K_rm,
K_rmdir
K_seclabel
K_service
K_setcon
K_setenforce
K_setenv
K_setkey
K_setprop
K_setrlimit
K_setsebool
K_socket
K_start
K_stop
K_trigger
K_symlink
K_sysclktz
K_user
K_wait
K_write
K_copy
K_chown
K_chmod
K_loglevel
K_load_persist_props
K_pipe
K_ioprio
KEYWORD_COUNT,
};该枚举的定义主要是为每个命令指定对应的序号。在keywords.h文件最后取消了宏__MAKE_KEYWORD_ENUM__ 及KEYWORD的定义,在system\core\init\init_parser.c文件中又重定义了KEYWORD宏:
#define KEYWORD(symbol, flags, nargs, func) \
[ K_##symbol ] = { #symbol, func, nargs + 1, flags, },该宏的定义是为了给接下来定义的keyword_info这个关键字信息数组的赋值,keyword_info定义如下:
struct {
const char *name;
int (*func)(int nargs, char **args);
unsigned char nargs;
unsigned char flags;
} keyword_info[KEYWORD_COUNT] = {
[ K_UNKNOWN ] = { "unknown", 0, 0, 0 },
#include "keywords.h"
};keyword_info数组元素是keywords.h文件中的内容,因为此时KEYWORD宏已经被定义了同时__MAKE_KEYWORD_ENUM__被取消定义,因此keywords.h文件内容此时变为:
KEYWORD(capability, OPTION, 0, 0)
KEYWORD(chdir, COMMAND, 1, do_chdir)
KEYWORD(chroot, COMMAND, 1, do_chroot)
KEYWORD(class, OPTION, 0, 0)
KEYWORD(class_start, COMMAND, 1, do_class_start)
KEYWORD(class_stop, COMMAND, 1, do_class_stop)
KEYWORD(class_reset, COMMAND, 1, do_class_reset)
KEYWORD(console, OPTION, 0, 0)
KEYWORD(critical, OPTION, 0, 0)
KEYWORD(disabled, OPTION, 0, 0)
KEYWORD(domainname, COMMAND, 1, do_domainname)
KEYWORD(exec, COMMAND, 1, do_exec)
KEYWORD(export, COMMAND, 2, do_export)
KEYWORD(group, OPTION, 0, 0)
KEYWORD(hostname, COMMAND, 1, do_hostname)
KEYWORD(ifup, COMMAND, 1, do_ifup)
KEYWORD(insmod, COMMAND, 1, do_insmod)
KEYWORD(import, SECTION, 1, 0)
KEYWORD(keycodes, OPTION, 0, 0)
KEYWORD(mkdir, COMMAND, 1, do_mkdir)
KEYWORD(mount_all, COMMAND, 1, do_mount_all)
KEYWORD(mount, COMMAND, 3, do_mount)
KEYWORD(on, SECTION, 0, 0)
KEYWORD(oneshot, OPTION, 0, 0)
KEYWORD(onrestart, OPTION, 0, 0)
KEYWORD(restart, COMMAND, 1, do_restart)
KEYWORD(restorecon, COMMAND, 1, do_restorecon)
KEYWORD(rm, COMMAND, 1, do_rm)
KEYWORD(rmdir, COMMAND, 1, do_rmdir)
KEYWORD(seclabel, OPTION, 0, 0)
KEYWORD(service, SECTION, 0, 0)
KEYWORD(setcon, COMMAND, 1, do_setcon)
KEYWORD(setenforce, COMMAND, 1, do_setenforce)
KEYWORD(setenv, OPTION, 2, 0)
KEYWORD(setkey, COMMAND, 0, do_setkey)
KEYWORD(setprop, COMMAND, 2, do_setprop)
KEYWORD(setrlimit, COMMAND, 3, do_setrlimit)
KEYWORD(setsebool, COMMAND, 1, do_setsebool)
KEYWORD(socket, OPTION, 0, 0)
KEYWORD(start, COMMAND, 1, do_start)
KEYWORD(stop, COMMAND, 1, do_stop)
KEYWORD(trigger, COMMAND, 1, do_trigger)
KEYWORD(symlink, COMMAND, 1, do_symlink)
KEYWORD(sysclktz, COMMAND, 1, do_sysclktz)
KEYWORD(user, OPTION, 0, 0)
KEYWORD(wait, COMMAND, 1, do_wait)
KEYWORD(write, COMMAND, 2, do_write)
KEYWORD(copy, COMMAND, 2, do_copy)
KEYWORD(chown, COMMAND, 2, do_chown)
KEYWORD(chmod, COMMAND, 2, do_chmod)
KEYWORD(loglevel, COMMAND, 1, do_loglevel)
KEYWORD(load_persist_props, COMMAND, 0, do_load_persist_props)
KEYWORD(pipe, COMMAND, 2, do_pipe)
KEYWORD(ioprio, OPTION, 0, 0)
使用上述KEYWORD宏展开得到keyword_info数组内容如下:
[ K_capability ] = { capability, 0, 1, OPTION, },
[ K_class ] = { class, 0, 1, OPTION, },
[ K_console ] = { console, 0, 1, OPTION, },
[ K_critical ] = { critical, 0, 1, OPTION, },
[ K_group ] = { group, 0, 1, OPTION, },
[ K_disabled ] = { disabled, 0, 1, OPTION, },
[ K_keycodes ] = { keycodes, 0, 1, OPTION, },
[ K_oneshot ] = { oneshot, 0, 1, OPTION, },
[ K_onrestart ] = { onrestart, 0, 1, OPTION, },
[ K_socket ] = { socket, 0, 1, OPTION, },
[ K_setenv ] = { setenv, 0, 3, OPTION, },
[ K_ioprio ] = { ioprio, 0, 1, OPTION, },
[ K_user ] = { user, 0, 1, OPTION, },
[ K_seclabel ] = { seclabel, 0, 1, OPTION, },
[ K_service ] = { service, 0, 1, SECTION, },
[ K_on ] = { on, 0, 1, SECTION, },
[ K_import ] = { import, 0, 2, SECTION, },
[ K_chdir ] = { chdir, do_chdir, 2, COMMAND, },
[ K_chroot ] = { chroot, do_chroot, 2, COMMAND, },
[ K_class_start ] = { class_start, do_class_start, 2, COMMAND, },
[ K_class_stop ] = { class_stop, do_class_stop, 2, COMMAND, },
[ K_class_reset ] = { class_reset, do_class_reset, 2, COMMAND, },
[ K_domainname ] = { domainname, do_domainname, 2, COMMAND, },
[ K_exec ] = { exec, do_exec, 2, COMMAND, },
[ K_export ] = { export, do_export, 3, COMMAND, },
[ K_hostname ] = { hostname, do_hostname, 2, COMMAND, },
[ K_ifup ] = { ifup, do_ifup, 2, COMMAND, },
[ K_insmod ] = { insmod, do_insmod, 3, COMMAND, },
[ K_mkdir ] = { mkdir, do_mkdir, 2, COMMAND, },
[ K_mount_all ] = { mount_all, do_mount_all, 2, COMMAND, },
[ K_mount ] = { mount, do_mount, 4, COMMAND, },
[ K_restart ] = { restart, do_restart, 2, COMMAND, },
[ K_restorecon ] = { restorecon, do_restorecon, 2, COMMAND, },
[ K_rm ] = { rm, do_rm, 2, COMMAND, }
[ K_rmdir ] = { rmdir, do_rmdir, 2, COMMAND, },
[ K_setcon ] = { setcon, do_setcon, 2, COMMAND, },
[ K_setenforce ] = { setenforce, do_setenforce, 2, COMMAND, },
[ K_setkey ] = { setkey, do_setkey, 1, COMMAND, },
[ K_setprop ] = { setprop, do_setprop, 3, COMMAND, },
[ K_setrlimit ] = { setrlimit, do_setrlimit, 4, COMMAND, },
[ K_setsebool ] = { setsebool, do_setsebool, 2, COMMAND, },
[ K_start ] = { start, do_start, 2, COMMAND, },
[ K_stop ] = { stop, do_stop, 2, COMMAND, },
[ K_trigger ] = { trigger, do_trigger, 2, COMMAND, },
[ K_symlink ] = { symlink, do_symlink, 2, COMMAND, },
[ K_sysclktz ] = { sysclktz, do_sysclktz, 2, COMMAND, },
[ K_wait ] = { wait, do_wait, 2, COMMAND, },
[ K_write ] = { write, do_write, 3, COMMAND, },
[ K_copy ] = { copy, do_copy, 3, COMMAND, },
[ K_chown ] = { chown, do_chown, 3, COMMAND, },
[ K_chmod ] = { chmod, do_chmod, 3, COMMAND, },
[ K_loglevel ] = { loglevel, do_loglevel, 2, COMMAND, },
[ K_load_persist_props] = { load_persist_props, do_load_persist_props,1, COMMAND, },
[ K_pipe ] = { pipe, do_pipe, 3, COMMAND, },
了解了这些内容之后,我们开始















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









