







前言
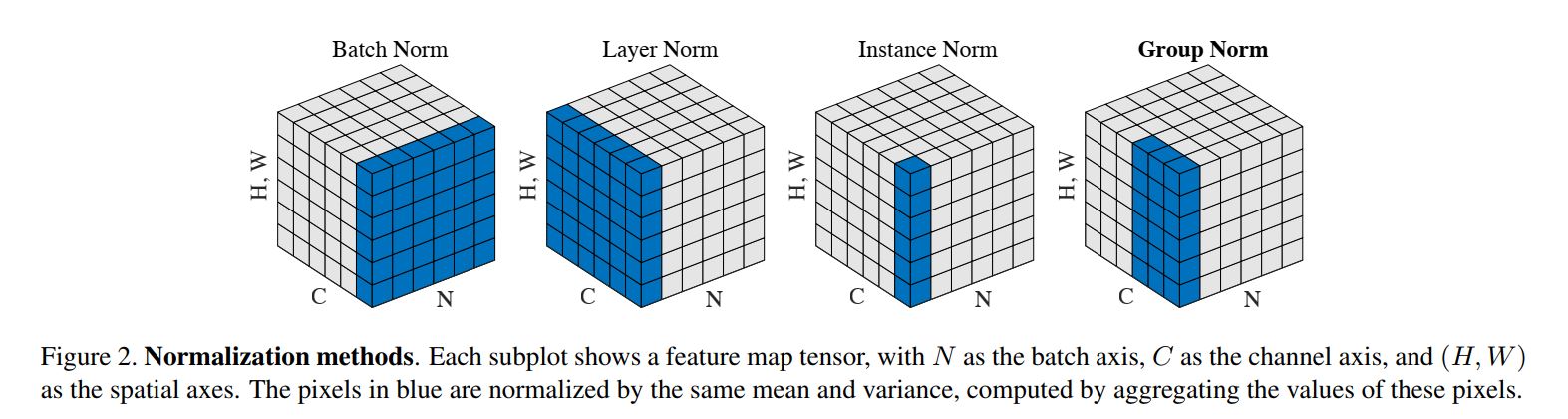
首先放一张四种归一化的对比
BatchNorm
最基础的这个。原论文给出的流程:
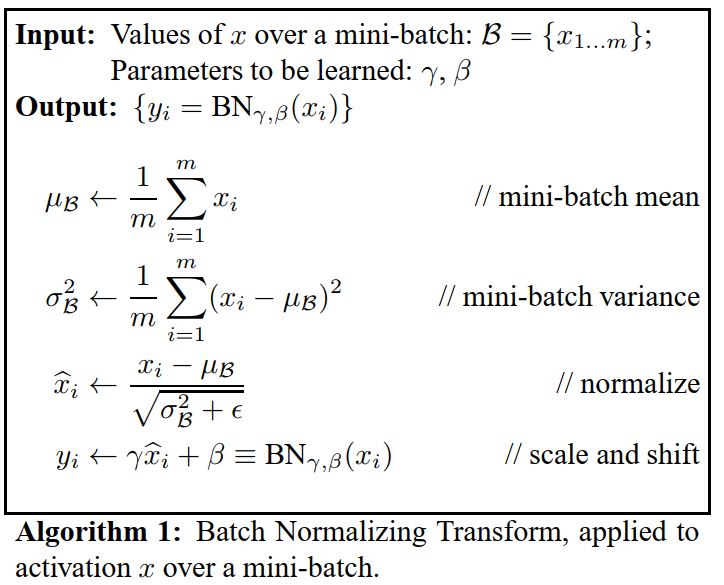
就是先对送进来的数据计算均值和方差,然后归一化,最后再拟合一下。
再对应一下pytorch中的公式。没问题,可以完美对应。
y = x − E [ x ] Var [ x ] + ϵ ∗ γ + β y=\frac{x-\mathrm{E}[x]}{\sqrt{\operatorname{Var}[x]+\epsilon}} * \gamma+\beta y=Var[x]+ϵx−E[x]∗γ+β
先看看Pytorch怎么使用的
torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
x = torch.randn([1,3,255,255])
bn = torch.nn.BatchNorm2d(3)
# bn.eval()
y = bn(x)
print(bn.running_mean) # 均值
print(bn.running_var) # 方差
tensor([-0.0029, 0.0019, 0.0008])
tensor([0.9955, 0.9959, 1.0055])
有以下的地方需要注意:
(1)bn.eval()会使bn.training=False,running_mean和running_var不再更新;train()则相反。
(2)bn.running_mean为均值,bn.running_var是方差。
再看看bn都包含什么
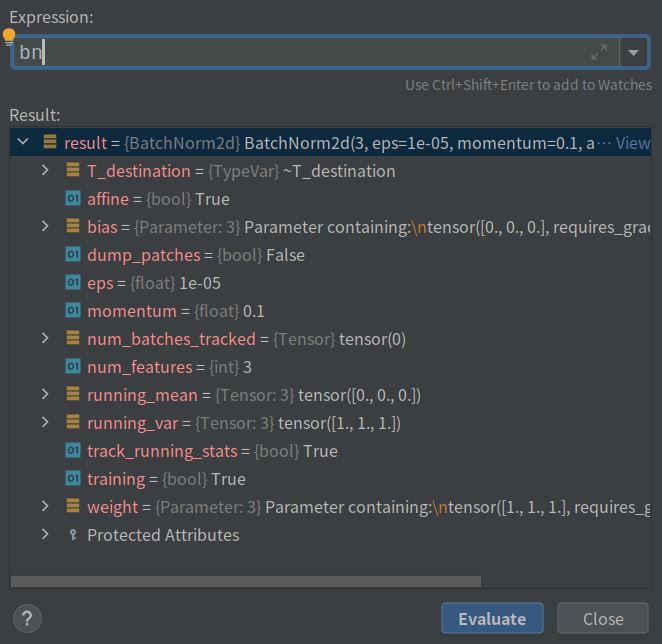
可以发现:
(1)running_mean和running_var是初始值分别是0和1,而维度是输入channel的值。
(2)weight和bias默认为1和0
(3)training=True(你可能会说track_running_stats=True,但我至今没发现这两项的实际作用有啥区别),running_mean和running_var默认随数据更新。
if self.training and self.track_running_stats:
# TODO: if statement only here to tell the jit to skip emitting this when it is None
if self.num_batches_tracked is not None: # type: ignore[has-type]
self.num_batches_tracked = self.num_batches_tracked + 1 # type: ignore[has-type]
if self.momentum is None: # use cumulative moving average
exponential_average_factor = 1.0 / float(self.num_batches_tracked)
else: # use exponential moving average
exponential_average_factor = self.momentum
也就是training 和 track_running_stats同时为True的时候才更新状态。
(4)还有一项难以解释的,momentum默认为0.1
momentum
这一项看了好半天,去看原论文Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift,里面没提到(给出的流程在上面。)
而pytorch官方解释也是不太清楚

明显,momentum用于更新均值和方差。但是这个x的上标是怎么回事?对拟合后的数据进行计算均值和方差?
咱还是想办法试一下吧。用两个输入x1~N(0,1) 和 x2~N(1,4)
# x1~N(0,1)
x1 = torch.randn([1,3,255,255])
bn = torch.nn.BatchNorm2d(3)
y1 = bn(x1)
print(bn.running_mean)
print(bn.running_var)
print('data:',torch.mean(y1),torch.var(y1))
# x2~N(1,4)
x2 = torch.randn([1,3,255,255]) * 2 +1
y2 = bn(x2)
print(bn.running_mean)
print(bn.running_var)
print('data:',torch.mean(y2),torch.var(y2))
tensor([ 0.0001, 0.0001, -0.0006])
tensor([1.0004, 1.0002, 0.9998])
data: tensor(0., grad_fn=<MeanBackward0>) tensor(1.0000, grad_fn=<VarBackward0>)
tensor([0.1006, 0.1004, 0.1006])
tensor([1.2988, 1.3021, 1.2999])
data: tensor(2.9724e-09, grad_fn=<MeanBackward0>) tensor(1.0000, grad_fn=<VarBackward0>)
此时没有反向传播,所以weight和bias一直是1和0。首先来看,bn的输出y1,y2~N(0,1)达到了预期效果。在执行y1 = bn(x1)后的running_mean和bn.running_var也很好解释。
问题在于在执行y2 = bn(x2)后,running_mean和bn.running_var分别是0.1和1.3,这是怎么来的?
看Pytorch的解释的意思,难道是计算E((1-m)*x1+m*x2)和D((1-m)*x1+m*x2),结果怎么算怎么不对。
实际上应该是这样
running_mean = (1-m)*E(x1) + m*E(x2) = (1-0.1)*0+0.1*1 = 0.1
running_var = (1-m)*D(x1) + m*D(x2) = (1-0.1)*1+0.1*4 = 1.3














 8252
8252











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









