







嵌入式设计与开发项目-DS18B20温度传感器程序设计
知识拓展:
①DS18B20是单线接口数字温度传感器,测量范围是-55 ~ +125℃,-10℃ ~ +85℃范围内精度是+0.5℃,测量分辨率为9 ~ 12位(复位值为12位,最大转换时间为750ms)
②DS18B20包括 寄生电源电路、 64位ROM和单线接口电路、 暂存器、 EEPROM、 8位CRC生成器和温度传感器等。寄生电源电路可以实现外部电源供电和单线寄生供电,64位ROM中存放的48位序列号用于识别同一单线上连接的多个DS18B20,以实现多点测温。
③64位ROM代码的格式为: 8位CRC校验码 + 48位序列号 + 8位系列码(0x28)
一、实现的功能
- ①实时获取DS18B20温度数据并显示到LCD屏幕上面;
- ②8个LED的流水灯控制,每隔1s点亮一个灯,按以上步骤重复进行;;
- ③根据传感器获取数据要求编写dsp_read()的流程;
二、根据功能实现代码
1、主文件main.c
#include"key.h"
#include"led.h"
#include"lcd.h"
#include"stdio.h"
#include"ds18b20.h"
unsigned int uiDsb_Val;
unsigned char ucSec , ucSec1;
unsigned char pucStr[21];
unsigned long ulTick_ms;
void DSB_Proc(void);
int main(void)
{
SysTick_Config(72000); //定时1ms(HCLK = 72MHz)
KEY_Init();
LED_Init();
STM3210B_LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
ds18b20_init_x();
while(1)
{
LED_Disp(ucSec);
DSB_Proc();
}
}
void DSB_Proc(void)
{
if(ucSec != ucSec1)
{
ucSec1 = ucSec;
uiDsb_Val = dsp_read();
sprintf((char*)pucStr," Temp:%5.2fC",uiDsb_Val/16.0);
LCD_DisplayStringLine(Line5,pucStr);
}
}
//SysTick 中断处理程序
void SysTick_Handler(void)
{
ulTick_ms++;
if(ulTick_ms % 1000 ==0)
ucSec++;
}
主函数分析:❤️ ❤️ ❤️
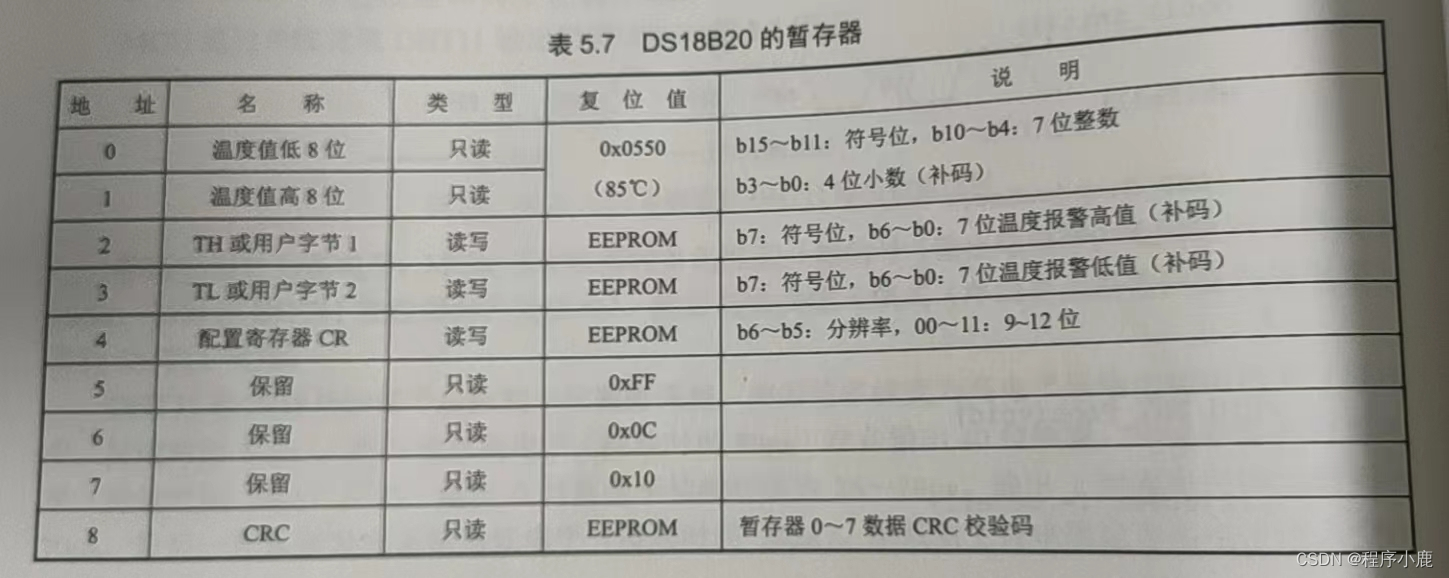
- DS18B20返回的16位二进制数uiDsb_Val 代表此刻探测的温度值,其高五位代表正负。如果高五位全部为1,则代表返回的温度值为负值。如果高五位全部为0,则代表返回的温度值为正值。后面的11位数据代表温度的绝对值,将其转换为十进制数值之后,再乘以0.0625即可获得此时的温度值。
- 左移n位等于乘于2n,右移n位等于除于2n 例如:除于16等同于右移4位;
2、DS18B20的头文件“ds18b20.h”
#ifndef __DS18B20_H
#define __DS18B20_H
#include "stm32f10x.h"
#define OW_DIR_OUT() mode_output1()
#define OW_DIR_IN() mode_input1()
#define OW_OUT_LOW() (GPIO_ResetBits(GPIOA,GPIO_Pin_6))
#define OW_GET_IN() (GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_6))
#define OW_SKIP_ROM 0xCC
#define DS18B20_CONVERT 0x44
#define DS18B20_READ 0xBE
void ds18b20_init_x(void);
unsigned int dsp_read(void);
#endif
简要分析:❤️ ❤️
- 通过宏定义 #define 把函数封装起来,可直接使用;
- 包含对于引脚初始化和获取温室数据的函数;
3、DS18B20的源文件“ds18b20.c”
#include "stm32f10x.h"
#include "ds18b20.h"
#define delay_us(X) delay((X)*72/5)
void delay(unsigned int n)
{
while(n--);
}
void ds18b20_init_x(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);
/* Configure Ports */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
//
void mode_input1(void )
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void mode_output1(void )
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
//
uint8_t ow_reset(void)
{
uint8_t err;
OW_DIR_OUT(); // pull OW-Pin low for 480us
OW_OUT_LOW(); // disable internal pull-up (maybe on from parasite)
delay_us(400); //about 480us
// set Pin as input - wait for clients to pull low
OW_DIR_IN(); // input
delay_us(66);
err = OW_GET_IN(); // no presence detect
// nobody pulled to low, still high
// after a delay the clients should release the line
// and input-pin gets back to high due to pull-up-resistor
delay_us(480-66);
if( OW_GET_IN() == 0 ) // short circuit
err = 1;
return err;
}
uint8_t ow_bit_io( uint8_t b )
{
OW_DIR_OUT(); // drive bus low
OW_OUT_LOW();
delay_us(1); // Recovery-Time wuffwuff was 1
if ( b ) OW_DIR_IN(); // if bit is 1 set bus high (by ext. pull-up)
#define OW_CONF_DELAYOFFSET 5
delay_us(15-1-OW_CONF_DELAYOFFSET);
if( OW_GET_IN() == 0 ) b = 0; // sample at end of read-timeslot
delay_us(60-15);
OW_DIR_IN();
return b;
}
uint8_t ow_byte_wr( uint8_t b )
{
uint8_t i = 8, j;
do
{
j = ow_bit_io( b & 1 );
b >>= 1;
if( j ) b |= 0x80;
}
while( --i );
return b;
}
//
uint8_t ow_byte_rd( void )
{
return ow_byte_wr( 0xFF );
}
//获取DS18B20温度传感器
unsigned int dsp_read(void)
{
unsigned char th,tl;
ow_reset(); //复位
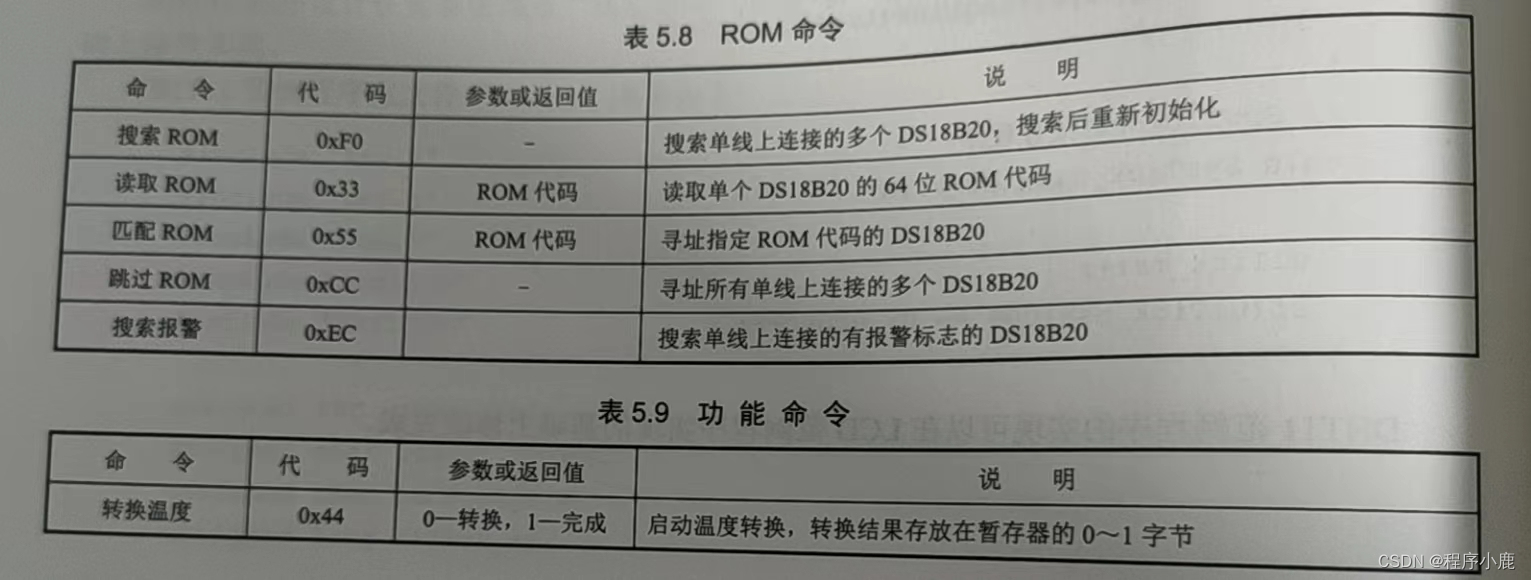
ow_byte_wr(0xCC); //跳过Rom
ow_byte_wr(0x44); //转换温度
ow_reset();
ow_byte_wr(0xCC);
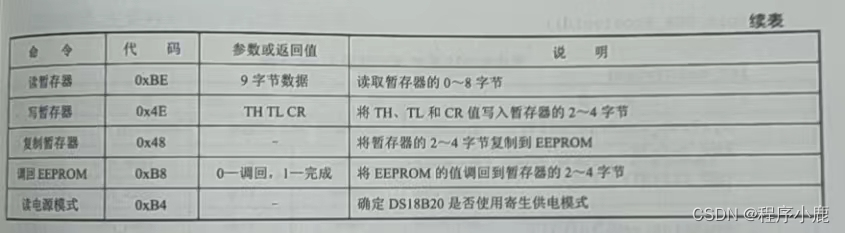
ow_byte_wr(0xBE); //读暂存器
tl = ow_byte_wr(0xFF); //读温度值低8位
th = ow_byte_wr(0xFF); //读温度值高8位
return (th<<8) + tl;
}
简要分析:❤️ ❤️
- 延时函数us的函数的 *#define delay_us(X) delay((X)72/5) 参数需要添加括号();
- 初始化端口可参考蓝桥杯-嵌入式设计与开发项目-LED指示灯程序设计
- DS18B20内部电路和时序详细介绍可参考:DS18B20温度传感器原理详解及例程代码
- 操作步骤包括:复位 → ROM命令 → 功能命令
三、实现功能过程的注意与学习点
1、注意点
1.获取到的温度值需要乘于0.625,才能转换为正确地温度值;
2、学习的知识点
- ①获取到DS18B20温度的传感器的实时数据;
- ②根据ROM命令表、功能命令表进行获取寄存器的温度数据;
- ③熟悉DS18B20温度传感器在实战中的应用;
❤️ ❤️ ❤️ ❤️ ❤️ ❤️















 2568
2568











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











