







因为在第一讲中GNSS说第(一)讲—基于RTKLIB的GPS / BDS联合单点定位性能评估,我们提到了加权最小二乘法,因此本讲中我们主要阐述一下加权最小二乘法的基本原理和相关概念:
概念:
1、正定矩阵(positive definite matrix):
设M是n阶方阵,如果对任何非零向量z,都有Z^TMZ> 0,其中Z^T 表示z的转置,就称M为正定矩阵
加权正定矩阵:
若M为权阵,则称M为加权正定矩阵
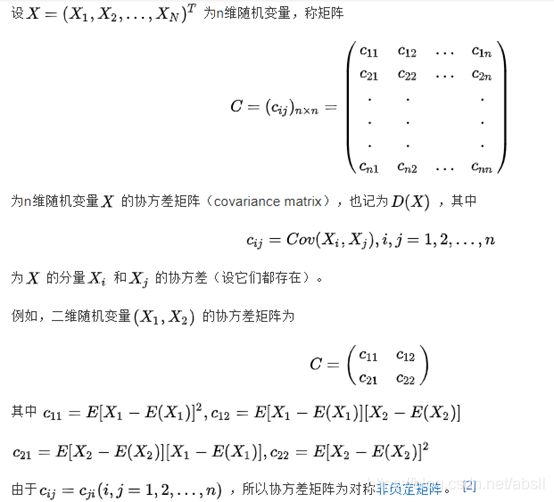
2、协方差矩阵(covariance matrix):
在统计学与概率论中,协方差矩阵的每个元素是各个向量元素之间的协方差。协方差矩阵为对称非负定矩阵。
基本原理和步骤
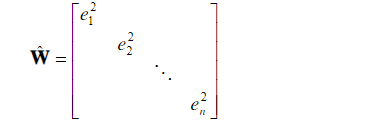
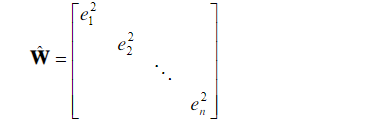
3、如何得到权矩阵W?
仍然是对原模型首先采用普通最小二乘法,得到随机误差项的近似估计量,以此构成权矩阵的估计量,即:
如果确实存在异方差性,则被有效地消除了;如果不存在异方差性,则加权最小二乘法等价于普通最小二乘法。
4、加权最小二乘法具体步骤是:
(1)选择普通最小二乘法估计原模型,得到随机误差项的近似估计量ei
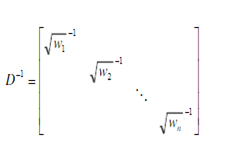
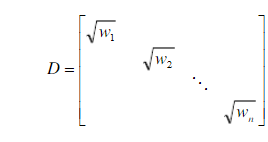
(2)建立1/ei 数据序列(D就相当于ei)
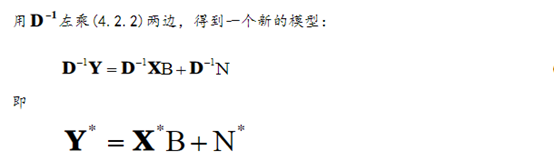
(3)序列作为权,进行估计得到参数估计量。实际上是以1/ei 乘原模型的两边,得到一个新模型,进而再采用普通最小二乘法估计新模型
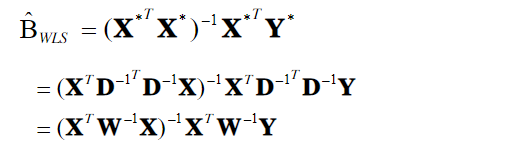
5、最后得参数估计量为:
评价
6、加权最小二乘法的近期误差比远期误差小,这就是加权最小二乘法的优势所在。
由于本讲是对加权最小二乘法的简单概述,因此内容都是引导性的,没有涉及到太繁杂的内容,博主会在接下来的几讲中重点讲述加权最小二乘法在RTKLIB中的estpos函数中的应用,敬请期待!
博主非数学专业,只是目前研究涉及到加权最小二乘法,故若在理解上由偏差,还望指正!















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











