






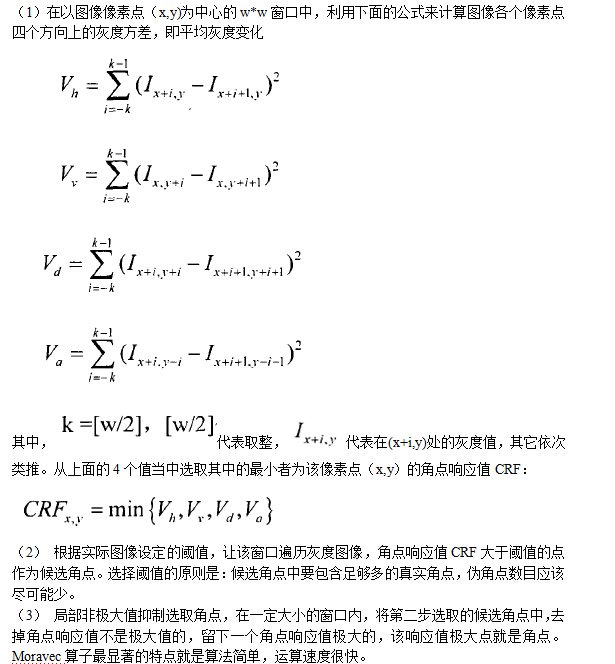
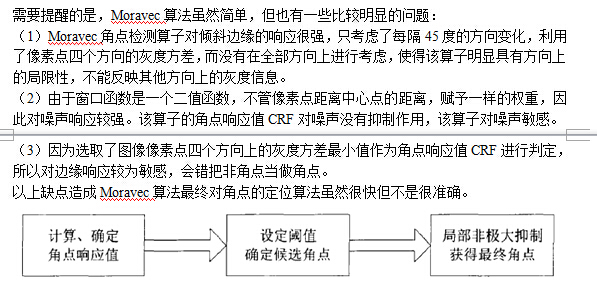
Moravec在1981年提出了Moravec角点检測算子,并将它应用于立体匹配。它是一种基于灰度方差的角点检測方法。该算子计算图像中某个像素点沿着水平、垂直、对角线、反对角线四个方向的灰度方差,当中的最小值选为该像素点的角点响应值CRF(Corner Response Function)。再通过局部非极大值抑制来检測是否为角点。详细实现过程例如以下:
转载于:https://www.cnblogs.com/zhchoutai/p/6889010.html
Moravec在1981年提出了Moravec角点检測算子,并将它应用于立体匹配。它是一种基于灰度方差的角点检測方法。该算子计算图像中某个像素点沿着水平、垂直、对角线、反对角线四个方向的灰度方差,当中的最小值选为该像素点的角点响应值CRF(Corner Response Function)。再通过局部非极大值抑制来检測是否为角点。详细实现过程例如以下:
转载于:https://www.cnblogs.com/zhchoutai/p/6889010.html

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 1万+
1万+





