







一、前言
本文参考自《深入理解Opencv 实用计算机视觉项目解析》中的自动车牌识别项目,并对其中的方法理解后,再进行实践。深刻认识到实际上要完成车牌区域准确定位、车牌区域中字符的准确分割,字符准确识别这一系列步骤的困难。所以最后的识别效果也是有待进一步提高。
二、程序流程
程序流程如下所示:
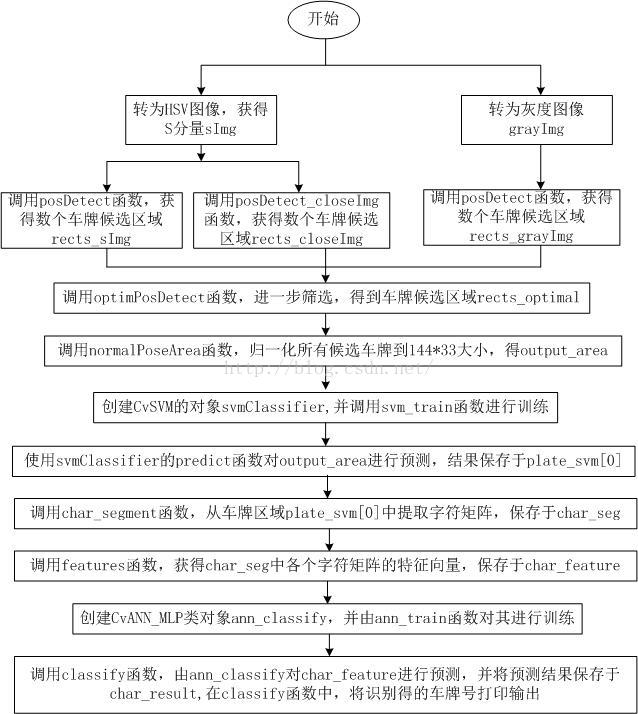
相应的main函数如下
#include "carID_Detection.h"
int main()
{
Mat img_input = imread("testCarID.jpg");
//如果读入图像失败
if(img_input.empty())
{
fprintf(stderr, "Can not load image %s\n", "testCarID.jpg");
return -1;
}
Mat hsvImg ;
cvtColor(img_input,hsvImg,CV_BGR2HSV);
vector<Mat> planes;
split(hsvImg,planes);
Mat sImg;
sImg = planes[1]; //获得红色分量
blur(sImg,sImg,Size(3,3)); //3*3高斯滤波
vector <RotatedRect> rects_sImg;
posDetect(sImg ,rects_sImg);
Mat grayImg;
RgbConvToGray(img_input ,grayImg);
medianBlur(grayImg,grayImg,3); //3*3中值滤波
vector <RotatedRect> rects_grayImg;
posDetect(grayImg ,rects_grayImg);
vector <RotatedRect> rects_closeImg; //车牌区域较为贴近
posDetect_closeImg(sImg ,rects_closeImg);
vector <RotatedRect> rects_optimal;
optimPosDetect(rects_sImg,rects_grayImg,rects_closeImg,rects_optimal);
vector <Mat> output_area;
normalPosArea(img_input ,rects_optimal,output_area); //获得144*33的候选车牌区域output_area
CvSVM svmClassifier;
svm_train(svmClassifier); //使用SVM对正负样本进行训练
vector<Mat> plates_svm; //需要把候选车牌区域output_area图像中每个像素点作为一行特征向量,后进行预测
for(int i=0;i< output_area.size(); ++i)
{
Mat img = output_area[i];
Mat p = img.reshape(1,1);
p.convertTo(p,CV_32FC1);
int response = (int)svmClassifier.predict( p );
if (response == 1)
plates_svm.push_back(output_area[i]); //保存预测结果
}
if(plates_svm.size() != 0)
{
imshow("Test", plates_svm[0]); //正确预测的话,就只有一个结果plates_svm[0]
waitKey(0);
}
else
{
std::cout<<"定位失败";
return -1;
}
//从SVM预测获得得车牌区域中分割得字符区域
vector <Mat> char_seg;
char_segment(plates_svm[0],char_seg);
//获得7个字符矩阵的相应特征矩阵
vector <Mat> char_feature;
char_feature.resize(7);
for (int i =0;i<char_seg.size() ;++ i)
features(char_seg[i], char_feature[i],5);
//神经网络训练
CvANN_MLP ann_classify;
ann_train(ann_classify, 34 ,48); //34为样本的类别数,48为隐藏层的神经元数
//字符预测
vector<int> char_result;
classify(ann_classify,char_feature,char_result);
//此函数等待按键,按键盘任意键就返回
svmClassifier.clear();
return 0;
}三、代码简介
本文编程没有使用类的概念,纯属面向过程编程,以下为主要使用的函数//carID_Detection.h
#include "opencv2/core/core.hpp"
#include "opencv2//highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/ml/ml.hpp"
#include <time.h>
#include <stdlib.h>
#include <iostream>
using namespace std;
using namespace cv;
void RgbConvToGray(const Mat& inputImage,Mat & outpuImage); //rgb转为灰度
void posDetect(Mat &, vector <RotatedRect> &); //粗步选取候选车牌区域
bool verifySizes(const RotatedRect & ); //车牌区域需要满足的条件
void posDetect_closeImg(Mat &inputImage , vector <RotatedRect> & rects ) ; //考虑到车牌距离非常近的时候的情况
bool verifySizes_closeImg(const RotatedRect & candidate); //距离近时的车牌区域需要满足的条件
void optimPosDetect(vector <RotatedRect> & rects_sImg , vector <RotatedRect> & rects_grayImg, //车牌区域进一步定位
vector <RotatedRect> & rects_closeImg,vector <RotatedRect> & rects_optimal );
float calOverlap(const Rect& box1,const Rect& box2); //计算2个矩阵的重叠比例
void normalPosArea(Mat &intputImg, vector<RotatedRect> &rects_optimal, vector <Mat>& output_area ); //车牌裁剪,标准化为144*33
void svm_train(CvSVM & ); //取出SVM.xml中的特征矩阵和标签矩阵进行训练
void char_segment(const Mat & inputImg,vector <Mat>&); //对车牌区域中的字符进行分割
bool char_verifySizes(const RotatedRect &); //字符区域需要满足的条件
void char_sort(vector <RotatedRect > & in_char ); //对字符区域进行排序
void features(const Mat & in , Mat & out ,int sizeData); //获得一个字符矩阵对应的特征向量
Mat projectHistogram(const Mat& img ,int t); //计算水平或累计直方图,取决于t为0还是1
void ann_train(CvANN_MLP &ann ,int numCharacters, int nlayers); //取出ann_xml中的数据,并进行神经网络训练
void classify(CvANN_MLP& ann, vector<Mat> &char_feature , vector<int> & char_result); //使用神经网络模型预测车牌字符,并打印至屏幕//carID_Detection.cpp
#include "carID_Detection.h"
void RgbConvToGray(const Mat& inputImage,Mat & outpuImage) //g = 0.3R+0.59G+0.11B
{
outpuImage = Mat(inputImage.rows ,inputImage.cols ,CV_8UC1);
for (int i = 0 ;i<inputImage.rows ;++ i)
{
uchar *ptrGray = outpuImage.ptr<uchar>(i);
const Vec3b * ptrRgb = inputImage.ptr<Vec3b>(i);
for (int j = 0 ;j<inputImage.cols ;++ j)
{
ptrGray[j] = 0.3*ptrRgb[j][2]+0.59*ptrRgb[j][1]+0.11*ptrRgb[j][0];
}
}
}
void posDetect_closeImg(Mat &inputImage , vector <RotatedRect> & rects ) //初步找到候选区域 rects
{
Mat img_canny;
Canny(inputImage, img_canny, 150, 220);
Mat img_threshold;
threshold(img_canny , img_threshold,0,255 , CV_THRESH_OTSU+CV_THRESH_BINARY); //otsu算法自动获得阈值
Mat element = getStructuringElement(MORPH_RECT ,Size(15 ,3)); //闭形态学的结构元素
morphologyEx(img_threshold ,img_threshold,CV_MOP_CLOSE,element); //形态学处理
//寻找车牌区域的轮廓
vector< vector <Point> > contours;
findContours(img_threshold ,contours,CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);//只检测外轮廓
//对候选的轮廓进行进一步筛选
vector< vector <Point> > ::iterator itc = contours.begin();
while( itc != contours.end())
{
RotatedRect mr = minAreaRect(Mat( *itc )); //返回每个轮廓的最小有界矩形区域
if(!verifySizes_closeImg(mr)) //判断矩形轮廓是否符合要求
{
itc = contours.erase(itc);
}
else
{
rects.push_back(mr);
++itc;
}
}
}
bool verifySizes_closeImg(const RotatedRect & candidate)
{
float error = 0.4;
const float aspect = 44/14; //长宽比
int min = 100*aspect*100; //最小区域
int max = 180*aspect*180; //最大区域
float rmin = aspect - aspect*error; //考虑误差后的最小长宽比
float rmax = aspect + aspect*error; //考虑误差后的最大长宽比
int area = candidate.size.height * candidate.size.width;
float r = (float)candidate.size.width/(float)candidate.size.height;
if(r <1)
r = 1/r;
if( (area < min || area > max) || (r< rmin || r > rmax) )
return false;
else
return true;
}
void posDetect(Mat &inputImage , vector <RotatedRect> & rects ) //初步找到候选区域 rects
{
Mat img_sobel;
Sobel(inputImage , img_sobel , CV_8U, 1,0,3,1,0);
Mat img_threshold;
threshold(img_sobel , img_threshold,0,255 , CV_THRESH_OTSU+CV_THRESH_BINARY); //otsu算法自动获得阈值
Mat element = getStructuringElement(MORPH_RECT ,Size(15 ,3)); //闭形态学的结构元素
morphologyEx(img_threshold ,img_threshold,CV_MOP_CLOSE,element);
//寻找车牌区域的轮廓
vector< vector <Point> > contours;
findContours(img_threshold ,contours,CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);//只检测外轮廓
//对候选的轮廓进行进一步筛选
vector< vector <Point> > ::iterator itc = contours.begin();
while( itc != contours.end())
{
RotatedRect mr = minAreaRect(Mat( *itc )); //返回每个轮廓的最小有界矩形区域
if(!verifySizes(mr)) //判断矩形轮廓是否符合要求
{
itc = contours.erase(itc);
}
else
{
rects.push_back(mr);
++itc;
}
}
}
bool verifySizes(const RotatedRect & candidate)
{
float error = 0.4;
const float aspect = 44/14; //长宽比
int min = 20*aspect*20; //最小区域
int max = 180*aspect*180; //最大区域
float rmin = aspect - 2*aspect*error; //考虑误差后的最小长宽比
float rmax = aspect + 2*aspect*error; //考虑误差后的最大长宽比
int area = candidate.size.height * candidate.size.width;
float r = (float)candidate.size.width/(float)candidate.size.height;
if(r <1)
r = 1/r;
if( (area < min || area > max) || (r< rmin || r > rmax) ) //满足该条件才认为该candidate为车牌区域
return false;
else
return true;
}
void optimPosDetect(vector <RotatedRect> & rects_sImg , vector <RotatedRect> & rects_grayImg,
vector <RotatedRect> & rects_closeImg,vector <RotatedRect> & rects_optimal )
{
for (int i=0;i<rects_sImg.size() ;++ i)
{
for (int j=0;j<rects_grayImg.size() ; ++j)
{
if (calOverlap(rects_sImg[i].boundingRect() , rects_grayImg[j].boundingRect()) > 0.2)
{
if(rects_sImg[i].boundingRect().width * rects_sImg[i].boundingRect().height
>= rects_grayImg[j].boundingRect().width * rects_grayImg[j].boundingRect().height)
rects_optimal.push_back(rects_sImg[i]);
else
rects_optimal.push_back(rects_grayImg[j]);
}
}
}
if (rects_closeImg.size()<2 ) //只考虑1个,为了速度
{
for (int i =0;i < rects_optimal.size();++ i )
for (int j =0;j < rects_closeImg.size();++ j)
{
if (( calOverlap(rects_optimal[i].boundingRect() , rects_closeImg[j].boundingRect()) < 0.2 &&
calOverlap(rects_optimal[i].boundingRect() , rects_closeImg[j].boundingRect()) > 0.05))
{
rects_optimal.push_back(rects_closeImg[j]);
}
}
}
}
float calOverlap(const Rect& box1,const Rect& box2)
{
if (box1.x > box2.x+box2.width) { return 0.0; }
if (box1.y > box2.y+box2.height) { return 0.0; }
if (box1.x+box1.width < box2.x) { return 0.0; }
if (box1.y+box1.height < box2.y) { return 0.0; }
float colInt = min(box1.x+box1.width,box2.x+box2.width) - max(box1.x, box2.x);
float rowInt = min(box1.y+box1.height,box2.y+box2.height) - max(box1.y,box2.y);
float intersection = colInt * rowInt;
float area1 = box1.width*box1.height;
float area2 = box2.width*box2.height;
return intersection / (area1 + area2 - intersection);
}
void normalPosArea(Mat &intputImg, vector<RotatedRect> &rects_optimal, vector <Mat>& output_area )
{
float r,angle;
for (int i = 0 ;i< rects_optimal.size() ; ++i)
{
//旋转区域
angle = rects_optimal[i].angle;
r = (float)rects_optimal[i].size.width / (float) (float)rects_optimal[i].size.height;
if(r<1)
angle = 90 + angle;
Mat rotmat = getRotationMatrix2D(rects_optimal[i].center , angle,1);//获得变形矩阵对象
Mat img_rotated;
warpAffine(intputImg ,img_rotated,rotmat, intputImg.size(),CV_INTER_CUBIC);
//裁剪图像
Size rect_size = rects_optimal[i].size;
if(r<1)
swap(rect_size.width, rect_size.height);
Mat img_crop;
getRectSubPix(img_rotated ,rect_size,rects_optimal[i].center , img_crop );
//用光照直方图调整所有裁剪得到的图像,使具有相同宽度和高度,适用于训练和分类
Mat resultResized;
resultResized.create(33,144,CV_8UC3);
resize(img_crop , resultResized,resultResized.size() , 0,0,INTER_CUBIC);
Mat grayResult;
RgbConvToGray(resultResized ,grayResult);
//blur(grayResult ,grayResult,Size(3,3));
equalizeHist(grayResult,grayResult);
output_area.push_back(grayResult);
}
}
void svm_train(CvSVM & svmClassifier)
{
FileStorage fs;
fs.open("SVM.xml" , FileStorage::READ);
Mat SVM_TrainningData;
Mat SVM_Classes;
fs["TrainingData"] >>SVM_TrainningData;
fs["classes"] >>SVM_Classes;
CvSVMParams SVM_params;
SVM_params.kernel_type = CvSVM::LINEAR;
svmClassifier.train(SVM_TrainningData,SVM_Classes ,Mat(),Mat(),SVM_params); //SVM训练模型
fs.release();
}
void char_segment(const Mat & inputImg,vector <Mat>& dst_mat)//得到20*20的标准字符分割图像
{
Mat img_threshold;
threshold(inputImg ,img_threshold , 180,255 ,CV_THRESH_BINARY );
Mat img_contours;
img_threshold.copyTo(img_contours);
vector < vector <Point> > contours;
findContours(img_contours ,contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_NONE);
vector< vector <Point> > ::iterator itc = contours.begin();
vector<RotatedRect> char_rects;
while( itc != contours.end())
{
RotatedRect minArea = minAreaRect(Mat( *itc )); //返回每个轮廓的最小有界矩形区域
Point2f vertices[4];
minArea.points(vertices);
if(!char_verifySizes(minArea)) //判断矩形轮廓是否符合要求
{
itc = contours.erase(itc);
}
else
{
++itc;
char_rects.push_back(minArea);
}
}
char_sort(char_rects); //对字符排序
vector <Mat> char_mat;
for (int i = 0; i<char_rects.size() ;++i )
{
char_mat.push_back( Mat(img_threshold,char_rects[i].boundingRect())) ;
}
Mat train_mat(2,3,CV_32FC1);
int length ;
dst_mat.resize(7);
Point2f srcTri[3];
Point2f dstTri[3];
for (int i = 0; i< char_mat.size();++i)
{
srcTri[0] = Point2f( 0,0 );
srcTri[1] = Point2f( char_mat[i].cols - 1, 0 );
srcTri[2] = Point2f( 0, char_mat[i].rows - 1 );
length = char_mat[i].rows > char_mat[i].cols?char_mat[i].rows:char_mat[i].cols;
dstTri[0] = Point2f( 0.0, 0.0 );
dstTri[1] = Point2f( length, 0.0 );
dstTri[2] = Point2f( 0.0, length );
train_mat = getAffineTransform( srcTri, dstTri );
dst_mat[i]=Mat::zeros(length,length,char_mat[i].type());
warpAffine(char_mat[i],dst_mat[i],train_mat,dst_mat[i].size(),INTER_LINEAR,BORDER_CONSTANT,Scalar(0));
resize(dst_mat[i],dst_mat[i],Size(20,20)); //尺寸调整为20*20
}
}
bool char_verifySizes(const RotatedRect & candidate)
{
float aspect = 33.0f/20.0f;
float charAspect = (float) candidate.size.width/ (float)candidate.size.height; //宽高比
float error = 0.35;
float minHeight = 11; //最小高度11
float maxHeight = 33; //最大高度33
float minAspect = 0.20; //考虑到数字1,最小长宽比为0.15
float maxAspect = aspect + aspect*error;
if( charAspect > minAspect && charAspect < maxAspect
&& candidate.size.height >= minHeight && candidate.size.width< maxHeight) //非0像素点数、长宽比、高度需满足条件
return true;
else
return false;
}
void char_sort(vector <RotatedRect > & in_char ) //对字符区域进行排序
{
vector <RotatedRect > out_char;
const int length = 7; //7个字符
int index[length] = {0,1,2,3,4,5,6};
float centerX[length];
for (int i=0;i < length ; ++ i)
{
centerX[i] = in_char[i].center.x;
}
for (int j=0;j <length;j++) {
for (int i=length-2;i >= j;i--)
if (centerX[i] > centerX[i+1])
{
float t=centerX[i];
centerX[i]=centerX[i+1];
centerX[i+1]=t;
int tt = index[i];
index[i] = index[i+1];
index[i+1] = tt;
}
}
for(int i=0;i<length ;i++)
out_char.push_back(in_char[(index[i])]);
in_char.clear(); //清空in_char
in_char = out_char; //将排序好的字符区域向量重新赋值给in_char
}
void features(const Mat & in , Mat & out ,int sizeData)
{
Mat vhist = projectHistogram(in , 1); //水平直方图
Mat hhist = projectHistogram(in , 0); //垂直直方图
Mat lowData;
resize(in , lowData ,Size(sizeData ,sizeData ));
int numCols = vhist.cols + hhist.cols + lowData.cols * lowData.cols;
out = Mat::zeros(1, numCols , CV_32F);
int j = 0;
for (int i =0 ;i<vhist.cols ; ++i)
{
out.at<float>(j) = vhist.at<float>(i);
j++;
}
for (int i=0 ; i < hhist.cols ;++i)
{
out.at<float>(j) = hhist.at<float>(i);
}
for(int x =0 ;x<lowData.rows ;++x)
{
for (int y =0 ;y < lowData.cols ;++ y)
{
out.at<float>(j) = (float)lowData.at<unsigned char>(x,y);
j++;
}
}
}
Mat projectHistogram(const Mat& img ,int t) //水平或垂直直方图,0为按列统计
{ //1为按行统计
int sz = (t)? img.rows: img.cols;
Mat mhist = Mat::zeros(1, sz ,CV_32F);
for(int j = 0 ;j < sz; j++ )
{
Mat data = (t)?img.row(j):img.col(j);
mhist.at<float>(j) = countNonZero(data);
}
double min,max;
minMaxLoc(mhist , &min ,&max);
if(max > 0)
mhist.convertTo(mhist ,-1,1.0f/max , 0);
return mhist;
}
void ann_train(CvANN_MLP &ann ,int numCharacters, int nlayers)
{
Mat trainData ,classes;
FileStorage fs;
fs.open("ann_xml.xml" , FileStorage::READ);
fs["TrainingData"] >>trainData;
fs["classes"] >>classes;
Mat layerSizes(1,3,CV_32SC1);
layerSizes.at<int>( 0 ) = trainData.cols;
layerSizes.at<int>( 1 ) = nlayers; //隐藏神经元数,可设为3
layerSizes.at<int>( 2 ) = numCharacters; //样本类数为34
ann.create(layerSizes , CvANN_MLP::SIGMOID_SYM ,1,1); //初始化ann
Mat trainClasses;
trainClasses.create(trainData.rows , numCharacters ,CV_32FC1);
for (int i =0;i< trainData.rows; i++)
{
for (int k=0 ; k< trainClasses.cols ; k++ )
{
if ( k == (int)classes.at<uchar> (i))
{
trainClasses.at<float>(i,k) = 1 ;
}
else
trainClasses.at<float>(i,k) = 0;
}
}
Mat weights(1 , trainData.rows , CV_32FC1 ,Scalar::all(1) );
ann.train( trainData ,trainClasses , weights);
}
void classify(CvANN_MLP& ann, vector<Mat> &char_feature , vector<int> & char_result)
{
char_result.resize(char_feature.size());
for (int i=0;i<char_feature.size(); ++i)
{
Mat output(1 ,34 , CV_32FC1); //1*34矩阵
ann.predict(char_feature[i] ,output);
Point maxLoc;
double maxVal;
minMaxLoc(output , 0 ,&maxVal , 0 ,&maxLoc);
char_result[i] = maxLoc.x;
}
std::cout<<"该车牌后6位为:";
char s[] = {'0','1','2','3','4','5','6','7','8','9','A','B',
'C','D','E','F','G','H','J','K','L','M','N','P','Q',
'R','S','T','U','V','W','X','Y','Z'};
for (int i=1;i<char_result.size(); ++i) //第一位是汉字,这里没实现对汉字的预测
{
std::cout<<s[char_result[i]];
}
std::cout<<'\n';
}四、关于SVM.xml与ann_xml.xml
SVM.xml中保存的是用于SVM训练的训练矩阵和类别矩阵数据,标签为"TrainingData"对应训练矩阵,为195*4752大小,195表示有195个训练样本,4752表示每个样本的特征向量维度,因为每个图片大小为144*33,将其转为一行,也即将每个像素值都作为一个特征值,则可得到4752个特征值,保存为1行,所使用的样本图片有75个正样本和120个负样本,保存如下:
标签为"classes"对应类别矩阵,为195*1矩阵,前75个值对应正样本为1.0,后120个值对应负样本为-1.0。
同理,ann_xml.xml保存的是用于神经网络训练的数据,标签为"TrainingData"对应训练矩阵,为1700*65大小,1700表示训练样本数,因为车牌字符有34类,每类有50个,故总数1700,65为每个样本提取的特征向量。标签为"classes"对应类别矩阵,为1700*1大小,标记负样本数是哪一类的,训练样本取自
五、结果及分析
勉强找到2张图片,可以完整地识别出车牌的后6为字符,效果如下。
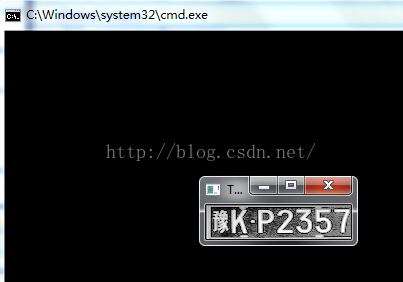
故该系统的性能仍有待提升,不过我认为在车牌定位方面可以有所改进,采用其他更好的车牌定位算法会更好,以及可以增加神经网络的训练样本。
六、完整代码文件下载
下载链接为:http://download.csdn.net/detail/ap1005834/9513328















 3715
3715

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









