









转载自:http://www-users.math.umd.edu/~jmr/246/predprey.html
The Predator-Prey Equation
Contents
Original Lotka-Volterra Model
We assume we have two species, herbivores with population x, and predators with propulation y. We assume that x grows exponentially in the absence of predators, and that y decays exponentially in the absence of prey. Consider, say, the system

Critical points:
syms x y vars = [x, y]; eqs = [x*(1-y/2), y*(-1+x/2)]; [xc, yc] = solve(eqs(1), eqs(2)); [xc, yc] A = jacobian(eqs, vars); disp('Matrix of linearized system:' ) subs(A, vars, [xc(1), yc(1)]) disp('eigenvalues:' ) eig(ans) disp('Matrix of linearized system:' ) subs(A, vars, [xc(2), yc(2)]) disp('eigenvalues:' ) eig(double(ans))
ans =
[ 0, 0]
[ 2, 2]
Matrix of linearized system:
ans =
[ 1, 0]
[ 0, -1]
eigenvalues:
ans =
1
-1
Matrix of linearized system:
ans =
[ 0, -1]
[ 1, 0]
eigenvalues:
ans =
0 + 1.0000i
0 - 1.0000i
Thus we have a center at (2, 2) and a saddle point at (0, 0), at least for the linearized system. This suggests the possibility of periodic orbits centered around (2, 2).
Phase Plot
rhs1 = @(t, x) ... [x(1)*(1-.5*x(2)); x(2)*(-1+.5*x(1))]; options = odeset('RelTol' , 1e-6); figure, hold on for x0 = 0:.2:2 [t, x] = ode45(rhs1, [0, 10], [x0;2]); plot(x(:,1), x(:,2)) end , hold off

Plot of Populations vs. Time
We color-code the plots so you can see which ones go together.
colors = 'rgbyc' ; figure, hold on for x0 = 0:10 [t, x] = ode45(rhs1, [0, 25], [x0/5; 2], options); subplot(2, 1, 1), hold on plot(t, x(:,1), colors(mod(x0,5)+1)) subplot(2, 1, 2), hold on plot(t, x(:, 2), colors(mod(x0,5)+1)) hold on end subplot(2, 1, 1) xlabel t ylabel 'x = prey' subplot(2, 1, 2) xlabel t ylabel 'y = predators' hold off

Modified Model with "Limits to Growth" for Prey (in Absence of Predators)
In the original equation, the population of prey increases indefinitely in the absence of predators. This is unrealistic, since they will eventually run out of food, so let's add another term limiting growth and change the system to

Critical points:
syms x y vars = [x, y]; eqs = [x*(1-y/2-x/4), y*(-1+x/2)]; [xc, yc] = solve(eqs(1), eqs(2)); [xc, yc] A = jacobian(eqs, vars); disp('Matrix of linearized system:' ) subs(A, vars, [xc(1), yc(1)]) disp('eigenvalues:' ) eig(ans) disp('Matrix of linearized system:' ) subs(A, vars, [xc(2), yc(2)]) disp('eigenvalues:' ) eig(ans) disp('Matrix of linearized system:' ) subs(A, vars, [xc(3), yc(3)]) disp('eigenvalues:' ) eig(double(ans))
ans = [ 0, 0] [ 4, 0] [ 2, 1] Matrix of linearized system: ans = [ 1, 0] [ 0, -1] eigenvalues: ans = 1 -1 Matrix of linearized system: ans = [ -1, -2] [ 0, 1] eigenvalues: ans = -1 1 Matrix of linearized system: ans = [ -1/2, -1] [ 1/2, 0] eigenvalues: ans = -0.2500 + 0.6614i -0.2500 - 0.6614i
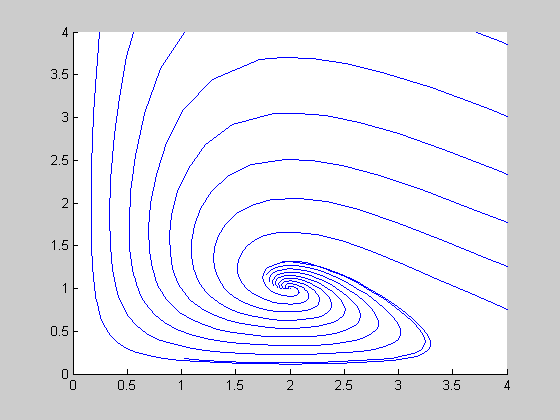
Thus we have saddles at (0, 0), (4, 0) and a stable spiral point at (2, 1).
rhs2 = @(t, x) ... [x(1)*(1-.5*x(2)-0.25*x(1)); x(2)*(-1+.5*x(1))]; figure, hold on for x0 = 0:.2:2 [t, x] = ode45(rhs2, [0, 10], [x0;1]); plot(x(:,1), x(:,2)) end for x0 = 0:.2:2 [t, x] = ode45(rhs2, [0, -10], [x0;1]); plot(x(:,1), x(:,2)) end axis([0, 4, 0, 4]), hold off
Warning: Failure at t=-3.380660e+000. Unable to meet integration tolerances without reducing the step size below the smallest value allowed (7.105427e-015) at time t. Warning: Failure at t=-3.535072e+000. Unable to meet integration tolerances without reducing the step size below the smallest value allowed (7.105427e-015) at time t. Warning: Failure at t=-3.735844e+000. Unable to meet integration tolerances without reducing the step size below the smallest value allowed (7.105427e-015) at time t. Warning: Failure at t=-3.984664e+000. Unable to meet integration tolerances without reducing the step size below the smallest value allowed (7.105427e-015) at time t. Warning: Failure at t=-4.299922e+000. Unable to meet integration tolerances without reducing the step size below the smallest value allowed (1.421085e-014) at time t. Warning: Failure at t=-4.719481e+000. Unable to meet integration tolerances without reducing the step size below the smallest value allowed (1.421085e-014) at time t. Warning: Failure at t=-5.332082e+000. Unable to meet integration tolerances without reducing the step size below the smallest value allowed (1.421085e-014) at time t. Warning: Failure at t=-6.437607e+000. Unable to meet integration tolerances without reducing the step size below the smallest value allowed (1.421085e-014) at time t.
Plot of Populations vs. Time
figure, hold on for x0 = 0:20 [t, x] = ode45(rhs2, [0, 25], [x0/5; 1], options); subplot(2, 1, 1), hold on plot(t, x(:,1), colors(mod(x0,5)+1)) subplot(2, 1, 2), hold on plot(t, x(:, 2), colors(mod(x0,5)+1)) hold on end subplot(2, 1, 1) xlabel t ylabel 'x = prey' subplot(2, 1, 2) xlabel t ylabel 'y = predators' hold off

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









