







2D变换
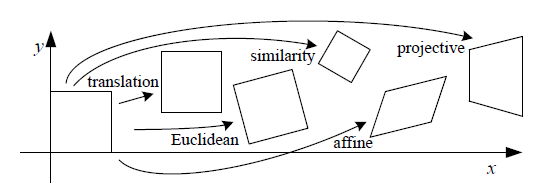
平移变换(translation):对于2D基元的平移变换为:
其中

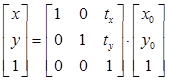
为满足两端的变量的齐次性,也可写作:
欧氏变换(Euclidean):在平移变换的基础上加上旋转:
其中R维护正交矩阵,即满足
相似变换(similarity):在欧氏变换的基础上加上全局尺度因子:
仿射变换(affine):在相似变换的基础上具有两个尺度因子,在主方向和次方向具有不同的尺度因子:
投影变换(projective):也成为透视变化或同态变化:
其中



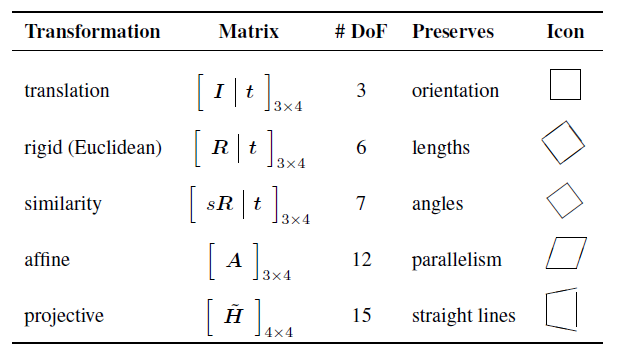
总结常用2D变换表如下:
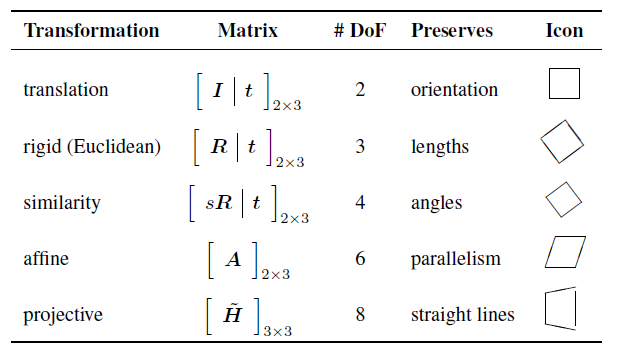
上述变换均可用于2D平面上的坐标点,是否可以直接应用于变换直线方程,对于齐次方程

故上述2D变换可直接用于2D直线的齐次表达变换。
拉伸/挤压(stretch/squash):改变图像的长宽比,一种仿射变换的受限形式,未旋转的仿射变换:
3D变换
3D坐标变换几何与2D变换的情形非常相似,如下表:
3D旋转
欧拉角(Euler angles):旋转矩阵是由围绕三个基轴的三个旋转的乘积形成的,即

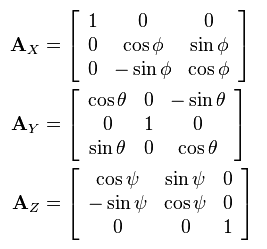
乘积得到旋转矩阵为:

欧拉角是旋转三次,旋转的次序会对结果产生影响,并且会出现万向节死锁问题(http://v.youku.com/v_show/id_XNzkyOTIyMTI=.html),不是很好用。
轴/角(axis/angle):轴/角是将三维旋转看作绕特定的轴

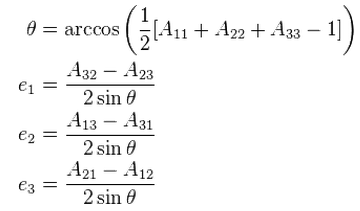
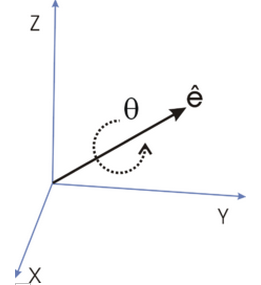
则旋转矩阵可以求解:

单位四元组(unit quaternions):单位四元组与轴/角原理相同,只是将轴/角表达为一个四维的单位矢量,写作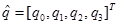

在选择表达方式时,一般根据应用选择。轴/角比较直观,容易理解,但是需要是动态表达,四元组没有不连续性,一般优先选择。
3D到2D投影
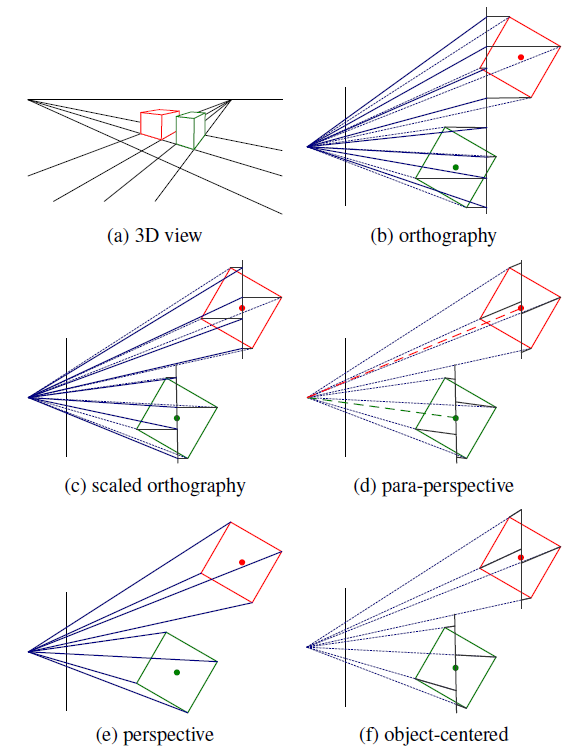
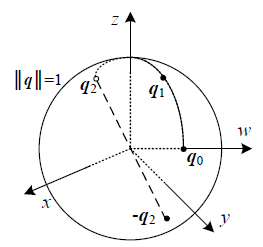
正交投影(orthography):正交投影是舍弃三维坐标的
归一的正交投影(scaled orthography):为了简化计算,将物体投影在不同的平行于图像平面的不同参考面上。
类透视投影(para-perspective):可以理解为分两步进行,第一步是在归一化的正交投影基础上,局部参考面的投影使用平行于物体中心的视线进行投影(图中实线部分),第二步再按照正常的投影方式(相似变换)投影到最终的图像平面上。这种投影的好处是比归一化的正交投影精度高,也不需要透视投影的除法增加计算复杂性。这两步组合可看作仿射变换。
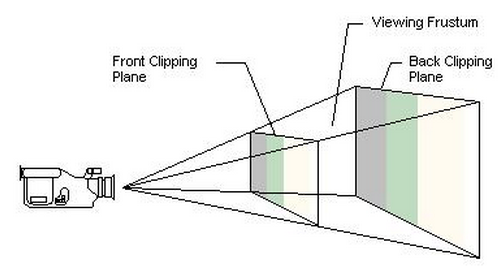
透视投影(perspective):就是常见的透视现象,使得离摄像机近的物体投影后较大,而离摄像机较远的物体投影后较小。故可用视锥体表示:
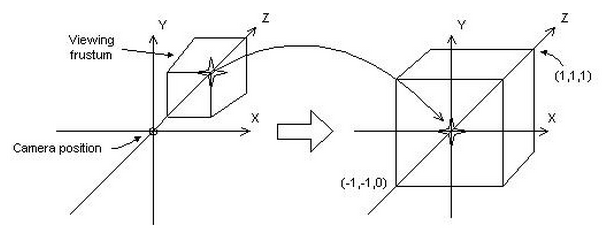
为了方便推到,一般将是锥体搬到一个统一标准的立方体中进行计算,满足
此时投影到
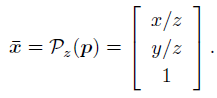
由于使得离摄像机近的物体投影后较大,而离摄像机较远的物体投影后较小,则最终值与 的倒数成线性关系,则表示为:
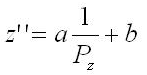
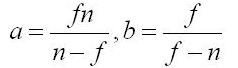
又有z的近截面Near和远截面Far范围缩小为0到1,故有公式:
解得:
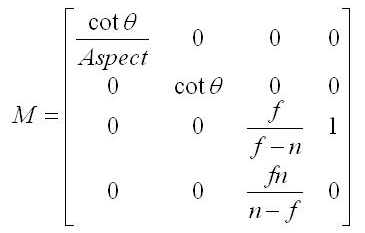
又有x与z的反比参数为视角的余切值,投影平面的纵横比为Aspect,则最终投影变换公式为:














 4703
4703











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









