







1、多态
多态是面向对象程序的核心概念。C++的多态实现是基于继承和虚函数,这种实现称为动态多态性。多态性可以简单的概括为“1个接口,多种方法”,在程序运行的过程中才决定调用的机制,简单的说就是可以通过父类指针调用子类的函数,可以让父类指针有多种形态。
2、问题引入
先看下面几个问题:
//code sample1
class A{
void func(){}
};
class B :public A{
void func(){}
};
int main(void)
{
cout<<sizeof(A)<<" "<<sizeof(B)<<endl;
return 0;
}输出的结果是:1 1
//code sample2
class A{
virtual void funcA(){}
};
class B:public A{
virtual void funcB(){}
};
int main(void)
{
cout<<sizeof(A)<<" "<<sizeof(B)<<endl;
return 0;
}
//code sample3
class A{
virtual void funcA(){}
};
class B:virtual public A{
virtual void funcB(){}
};
int main(void)
{
cout<<sizeof(A)<<" "<<sizeof(B)<<endl;
return 0;
}输出结果是:4 12
分析结果:
1、对于sample1情况,没有出现虚函数,且也没有任何成员变量,因此是一个空类。空类理论上可以实例化,每个实例在内存中都有独一无二的地址来表明,所以会占用1个字节的空间。
2、对于第二、三种情况,引入了虚函数,而且在第三种情况中,还引入了虚基类的概念。下面从内存分配角度来说明这个问题。
最简单的对象模型(如图1所示)
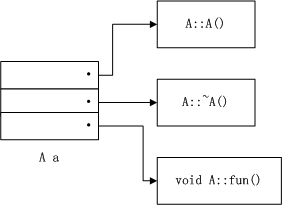
图1,简单对象模型
在内存中,对象a的静态/非静态成员函数和成员变量的地址都存储在一个表中,通过表内存储的地址指向相应的部分。
空间上:没必要为每一个实例存储静态成员变量和成员函数;
效率上:每次执行实例的一个成员函数都要遭表内进行搜索;
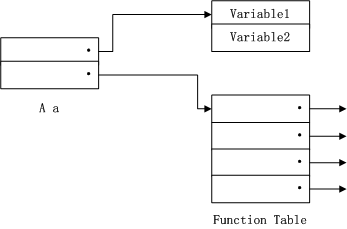
这是最初的对象模型,后来改良成表格驱动对象模型(如图2所示):
class A
{
public:
int a;
void foo(){}
virtual void funcA(){}
virtual void func()
{cout << "class A's func." << endl;}
};
classB : public A
{
public:
int b;
void foo(){}
virtual void funcB(){}
virtual void func()
{cout << "class B's func." << endl;}
};
int main(void)
{
A *pa = newB;
pa->func();
}输出的结果是:class B's func.
多态就是多种状态,一个事物可能有多种表现形式,譬如动物,有十二生肖甚至更多的表现形式。当基类里实现了某个虚函数,但派生类没有实现,那么类 B 的实例里的虚函数表中放置的就是 &A::func。此外,派生类也实现了虚函数,那么类 B 实例里的虚函数表中放置的就是 B::func。A *pa = new B; 因为 B 实现了 func,那么它被放入 A 实例的虚拟函数表中,从而代替 A 实例本身的虚拟函数。pa->func(); 调用的结果就不稀奇了,这是虚函数机制带来的。
class A 和 class B 的内存布局和 vptr 可能是下面的样子:
- ———-
- | int a |
- ———-
- | vptr | ——–>| &A::funcA()
- ———- ————————————————-
- | &A::func()
- ————————————————-
- ———-
- | int a |
- ———-
- | vptr | ——–>| &A::funcA() 依旧是 A 的虚函数
- ———- ————————————————-
- | int b | | &B::func() A::func()
- ———- ————————————————-
- | &B::funcB()
- ————————————————-
总结一下:
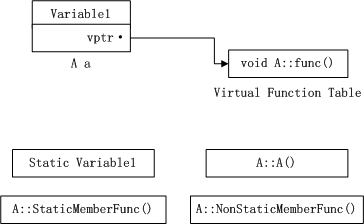
- 当引入虚函数的时候,会添加 vptr 和 其指向的一个虚拟函数表从而增加额外的空间,这些信息在编译期间就已经确定,而且在执行期不会插足修改任何内容。
- 在类的构造和析构函数当中添加对应的代码,从而能够为 vptr 设定初值或者调整 vptr,这些动作由编译器完成,class 会产生膨胀。
- 当出现继承关系时,虚拟函数表可能需要改写,即当用基类的指针指向一个派生类的实体地址,然后通过这个指针来调用虚函数。这里要分两种情况,当派生类已经改写同名虚函数时,那么此时调用的结果是派生类的实现;而如果派生类没有实现,那么调用依然是基类的虚函数实现,而且仅仅在多态仅仅在虚函数上表现。
- 多态仅仅在虚函数上表现,意即倘若同样用基类的指针指向一个派生类的实体地址,那么这个指针将不能访问和调用派生类的成员变量和成员函数。
- 所谓执行期确定的东西,就是基类指针所指向的实体地址是什么类型了,这是唯一执行期确定的。以上是单一继承的情况,在多重继承的情况会更为复杂。
class A
{
public:
virtual ~A(){cout << "A destruction" << endl;}
int a;
void fooA(){}
virtual void func(){cout << "A func." << endl;};
virtual void funcA(){cout << "funcA." << endl;}
};
class B
{
public:
virtual ~B(){cout << "B destruction" << endl;}
int b;
void fooB(){}
virtual void func(){cout << "B func." << endl;};
virtual void funcB(){cout << "funcB." << endl;}
};
class C : public A,public B
{
public:
virtual ~C(){cout << "C destruction" << endl;}
int c;
void fooC(){}
virtual void func(){cout << "C func." << endl;};
virtual void funcC(){cout << "funcC." << endl;}
};
int main(void)
{
return 0;
}当用基类的指针指向一个派生类的实体地址,基类有两种情况,一种是 class A 和 class B,如果是 A,问题容易解决,几乎和上面单一继承情况类似;但倘若是 B,要做地址上的转换,情况会比前者复杂。先展现class A,B,C 的内存布局和 vptr:
- ———-
- | int a |
- ———-
- | vptr | ——–>| &A::~A()
- ———- ————————————————-
- | &A::func()
- ————————————————-
- | &A::funcA()
- ————————————————-
- ———-
- | int b |
- ———-
- | vptr | ——–>| &B::~B()
- ———- ————————————————-
- | &B::func()
- ————————————————-
- | &B::funcB()
- ————————————————–
- | &C::~C() &A::~A()
- ———- ————————————————-
- | int a | | &C::func() &A::func()
- ———- ————————————————-
- ———- | &C::funcC()
- | vptr | ——–>————————————————-
- ———- | &A::funcA()
- ———- ————————————————-
- | int b | | &B::funcB() 跳
- ———- ————————————————-
- ———-
- | vptr | ——–>| &C::~C() &B::~B() 跳
- ———- ————————————————-
- | int c | | &C::func() &B::func() 跳
- ———- ————————————————-
- | &B::funcB()
多重继承中,会有保留两个虚拟函数表,一个是与 A 共享的,一个是与 B 相关的,他们都在原有的基础上进行了修改:
对于 A 的虚拟函数表:
- 覆盖派生类实现的同名虚函数,并用派生类实现的析构函数覆盖原有虚函数
- 添加了派生类独有的虚函数
- 添加了右端父类即 B 的独有虚函数,需跳转
对于 B 的虚拟函数表:
- 覆盖派生类实现的同名虚函数,并用派生类实现的析构函数覆盖原有虚函数,但需跳转
int main(void)
{
A *pa = new C;
B *pb = new C;
C *pc = new C;
pa->func();
pb->func();
pc->funcC();
delete pb;
delete pa;
delete pc;
}输出结果是:
C func.
funcC.
C destruction
B destruction
A destruction
C destruction
B destruction
A destruction
C destruction
B destruction
A destruction
7 行和 8 行的行为有很大的区别,7 行的调用和上面的单一继承的情况类似,不赘述。8 行的 pb->func(); 中,pb 所指向的是上图第 9 行的位置,编译器已在内部做了转换,也就是 pa 和 pb 所指的位置不一样,pa 指向的是上图第 3 行的位置。接着需要注意的是,pb->func(); 调用时,在虚拟函数表中找到的地址需要再进行一次跳转,目标是 A 的虚拟函数表中的 &C::func(),然后才真正执行此函数。所以,上面的情况作了指针的调整。
那什么时候会出现跳,常见的有两种情况:
- 右端基类,对应上面的具体是 B,调用派生类虚拟函数,比如 pb->~C() 和 pb->func()
- 派生类调用右端基类的虚拟函数,比如 pc->funcB()
所以 delete pa; 和 delete pa; 的操作是不一样的,pb->funcB(); 和 pc->funcB(); 也不一样。
C++ 为实现多态引入虚函数机制,带来了空间和执行上的折损。















 1559
1559











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









