







SLAM 主要分为两个部分:前端和后端,前端也就是视觉里程计(VO),它根据相邻图像的信息粗略的估计出相机的运动,给后端提供较好的初始值。VO的实现方法可以根据是否需要提取特征分为两类:基于特征点的方法,不使用特征点的直接方法。 基于特征点的VO运行稳定,对光照、动态物体不敏感。
图像特征点的提取和匹配是计算机视觉中的一个基本问题,在视觉SLAM中就需要首先找到相邻图像对应点的组合,根据这些匹配的点对计算出相机的位姿(相对初始位置,相机的旋转和平移)。
本文对这段时间对特征点的学习做一个总结,主要有以下几方面的内容:
- 特征点概述
- 常用的特征点算法,如SIFT,SURF,FAST等
- OpenCV3中特征点的提取和匹配
特征点概述
如何高效且准确的匹配出两个不同视角的图像中的同一个物体,是许多计算机视觉应用中的第一步。虽然图像在计算机中是以灰度矩阵的形式存在的,但是利用图像的灰度并不能准确的找出两幅图像中的同一个物体。这是由于灰度受光照的影响,并且当图像视角变化后,同一个物体的灰度值也会跟着变化。所以,就需要找出一种能够在相机进行移动和旋转(视角发生变化),仍然能够保持不变的特征,利用这些不变的特征来找出不同视角的图像中的同一个物体。
为了能够更好的进行图像匹配,需要在图像中选择具有代表性的区域,例如:图像中的角点、边缘和一些区块,但在图像识别出角点是最容易,也就是说角点的辨识度是最高的。所以,在很多的计算机视觉处理中,都是提取交掉作为特征,对图像进行匹配,例如SFM,视觉SLAM等。
但是,单纯的角点并不能很好的满足我们的需求,例如:相机从远处得到的是角点,但是在近处就可能不是角点;或者,当相机旋转后,角点就发生了变化。为此,计算机视觉的研究者们设计了许多更为稳定的的特征点,这些特征点不会随着相机的移动,旋转或者光照的变化而变化。例如:SIFT,SURF,ORB等
一个图像的特征点由两部分构成:关键点(Keypoint)和描述子(Descriptor)。 关键点指的是该特征点在图像中的位置,有些还具有方向、尺度信息;描述子通常是一个向量,按照人为的设计的方式,描述关键点周围像素的信息。通常描述子是按照外观相似的特征应该有相似的描述子设计的。因此,在匹配的时候,只要两个特征点的描述子在向量空间的距离相近,就可以认为它们是同一个特征点。
特征点的匹配通常需要以下三个步骤:
- 提取图像中的关键点,这部分是查找图像中具有某些特征(不同的算法有不同的)的像素
- 根据得到的关键点位置,计算特征点的描述子
- 根据特征点的描述子,进行匹配
这里先介绍下特征点的描述子,一个好的描述子是准确匹配的基础,关键点的提取和特征点的匹配,在后面介绍。
特征点描述子
从图像中提取到特征的关键点信息,通常只是其在图像的位置信息(有可能包含尺度和方向信息),仅仅利用这些信息无法很好的进行特征点的匹配,所以就需要更详细的信息,将特征区分开来,这就是特征描述子。另外,通过特征描述子可以消除视角的变化带来图像的尺度和方向的变化,能够更好的在图像间匹配。
特征的描述子通常是一个精心设计的向量,描述了关键点及其周围像素的信息。为了能够更好的匹配,一个好的描述子通常要具有以下特性:
- 不变性 指特征不会随着图像的放大缩小旋转而改变。
- 鲁棒性 对噪声、光照或者其他一些小的形变不敏感
- 可区分性 每一个特征描述子都是独特的,具有排他性,尽可能减少彼此间的相似性。
其中描述子的可区分性和其不变性是矛盾的,一个具有众多不变性的特征描述子,其区分局部图像内容的能力就比较稍弱;而如果一个很容易区分不同局部图像内容的特征描述子,其鲁棒性往往比较低。所以,在设计特征描述子的时候,就需要综合考虑这三个特性,找到三者之间的平衡。
特征描述子的不变性主要体现在两个方面:
- 尺度不变性 Scale Invarient
指的是同一个特征,在图像的不同的尺度空间保持不变。匹配在不同图像中的同一个特征点经常会有图像的尺度问题,不同尺度的图像中特征点的距离变得不同,物体的尺寸变得不同,而仅仅改变特征点的大小就有可能造成强度不匹配。如果描述子无法保证尺度不变性,那么同一个特征点在放大或者缩小的图像间,就不能很好的匹配。为了保持尺度的不变性,在计算特征点的描述子的时候,通常将图像变换到统一的尺度空间,再加上尺度因子。
- 旋转不变性 Rotation Invarient
指的是同一个特征,在成像视角旋转后,特征仍然能够保持不变。和尺度不变性类似,为了保持旋转不变性,在计算特征点描述子的时候,要加上关键点的方向信息。
为了有个更直观的理解,下面给出SIFT,SURF,BRIEF描述子计算方法对比
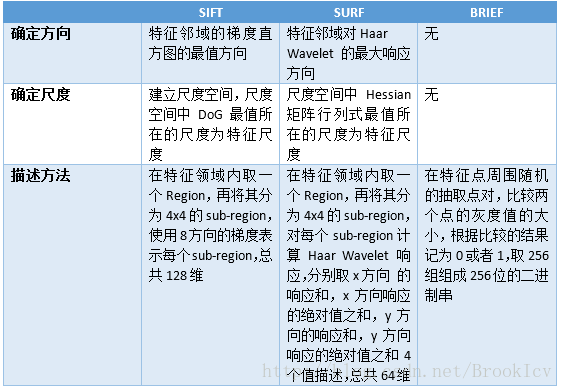
从上表可以看出,SIFT,SURF和BRIEF描述子都是一个向量,只是维度不同。其中,SIFT和SURF在构建特征描述子的时候,保存了特征的方向和尺度特征,这样其特征描述子就具有尺度和旋转不变性;而BRIEF描述子并没有尺度和方向特征,不具备尺度和旋转不变性。
常用的特征点算法
上面提到图像的特征点包含两个部分:
- 特征点的提取,在图像检测到特征点的位置
- 特征点的描述,也就是描述子。
在图像中提取到关键点的位置信息后,为了能够更有效的匹配(主要是保证尺度和旋转不变性),通常使用一个向量来描述关键点及其周围的信息。特征的描述子,在特征点的匹配中是非常重要的,上一小节中对其应该具有的性质做了介绍。但具体到一个算法来说,可能其既有特征点的提取算法也有特征点描述子的算法,也有可能其仅仅是一个特征点提取算法或者是特征点的描述子算法。在本小节就常用的特征点算法做一个简要的说明。
SIFT
提到特征点算法,首先就是大名鼎鼎的SIFT算法了。SIFT的全称是Scale Invariant Feature Transform,尺度不变特征变换,2004年由加拿大教授David G.Lowe提出的。SIFT特征对旋转、尺度缩放、亮度变化等保持不变性,是一种非常稳定的局部特征。
SIFT算法主要有以下几个步骤:
- 高斯差分金字塔的构建
使用组和层的结构构建了一个具有线性关系的金字塔(尺度空间),这样可以在连续的高斯核尺度上查找图像的特征点;另外,它使用一阶的高斯差分来近似高斯的拉普拉斯核,大大的减少了运算量。
- 尺度空间的极值检测及特征点的定位
搜索上一步建立的高斯尺度空间,通过高斯差分来识别潜在的对尺度和旋转不变的特征点。但是,在离散空间中,局部极值点可能并不是真正意义的极值点,真正的极值点有可能落在离散点的间隙中,SIFT通过尺度空间DoG函数进行曲线拟合寻找极值点。
- 特征方向赋值
基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向,后续的所有操作都是对于关键点的方向、尺度和位置进行变换,从而提供这些特征的不变性。
- 特征描述子的生成
通过上面的步骤已经找到的SIFT特征点的位置、方向、尺度信息,最后使用一组向量来描述特征点及其周围邻域像素的信息。
SIFT算法中及包含了特征点的提取算法,也有如何生成描述子的算法,更进一步的SIFT算法介绍可参看SIFT特征详解
SURF
SURF全称 Speeded Up Robust Features,是在SIFT算法的基础上提出的,主要针对SIFT算法运算速度慢,计算量大的缺点进行了改进。
SURF的流程和SIFT比较类似,这些改进体现在以下几个方面:
- 特征点检测是基于Hessian矩阵,依据Hessian矩阵行列式的极值来定位特征点的位置。并且将Hession特征计算与高斯平滑结合在一起,两个操作通过近似处理得到一个核模板。
- 在构建尺度空间时,使用box filter与源图像卷积,而不是使用DoG算子。
- SURF使用一阶Haar小波在x、y两个方向的响应作为构建特征向量的分布信息。
FAST特征点提取算法
SIFT和SURF是非常好的,稳定的特征点算法,但运算速度是其
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1523
1523











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









