







 超级会员免费看
超级会员免费看
前面学习了一个暴力求解矩阵的乘法,计算是正确的,但是当数量大时,就非常耗费时间。比如在机器人手臂运动中,要解决移动位置,或者旋转的角度等,就要非常快地计算矩阵的乘法。由于矩阵是一种二维的结构,那么可以把矩阵变成分块计算,就跟生日切蛋糕一样,切成一小块一小块,如果依次类推,再切小一点,最终会切到只有一小块的。当一个矩阵分块分成只乘一个元素时,两个矩阵相乘就是a11 * b11了,这个也是递归终止条件。
这个算法可以用抽象语言表示如下:
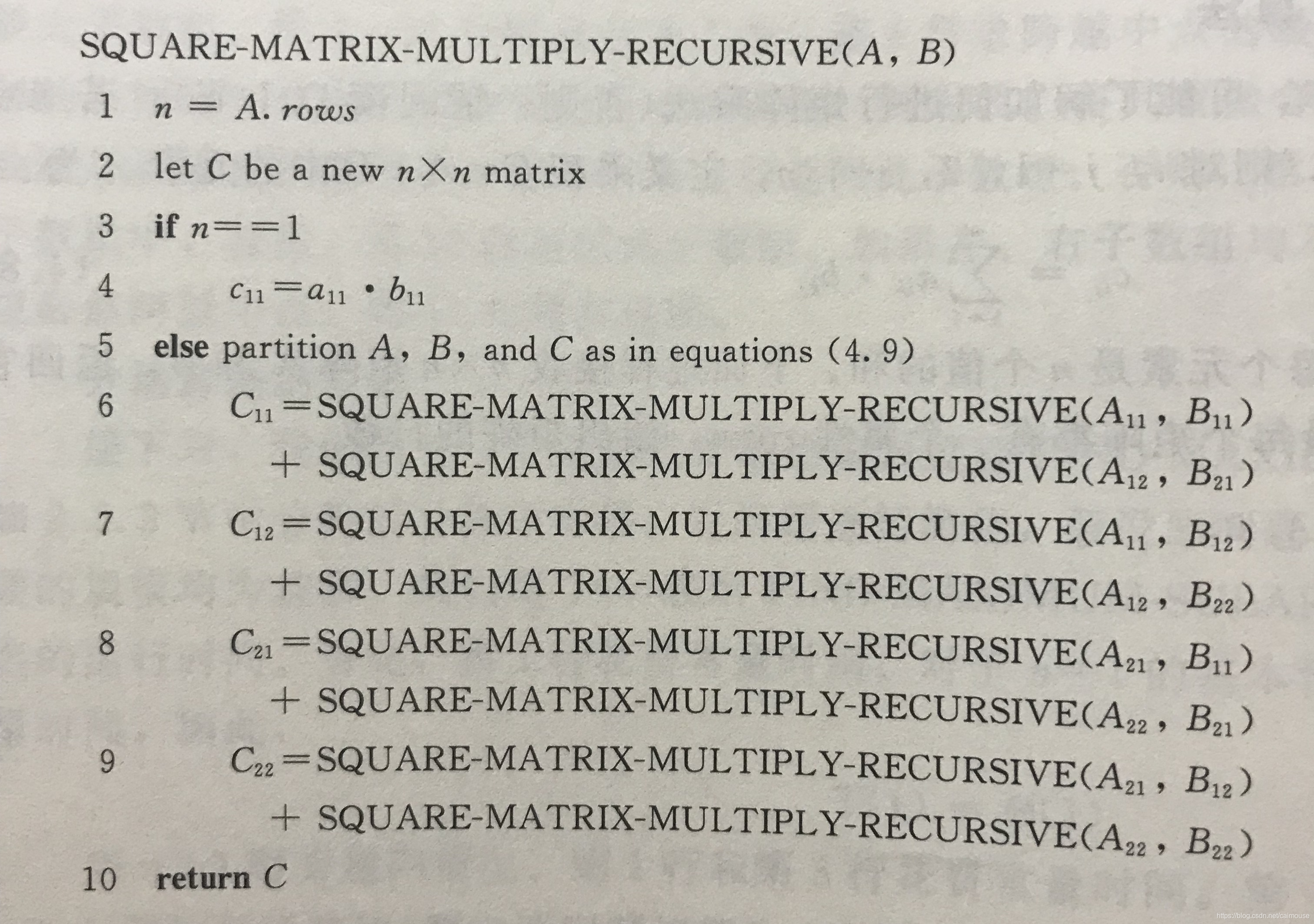
第一行代码得到矩阵的行数和列数,因为矩阵是方阵,所以行数与列数相等。第二行代码是创建一个nXn的返回矩阵,以便保存计算结果返回。第三、四行代码是判断矩阵分割是否到达最小条件,递归返回条件,同时计算只有一个元素的矩阵乘法。第5行是对矩阵进行分割,这里分割有很多方法,最快最有效的是只针对矩阵数组下标的计算,不需要复制矩阵元素,这样节省拷贝时间。第六到第九行是矩阵相乘之后再相加,这里共有8次递归和4次相加,因此它的时间复杂度还是O(n^2)

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1413
1413











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











