







✅ 博主简介:擅长数据处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
(1)多目标路径规划问题模型的构建
在智能制造车间中,AGV的物料配送路径规划问题是一个复杂的多目标优化问题。为了提升配送效率和降低配送成本,本文首先建立了以配送满意度最高和配送总成本最小为目标的路径规划模型。配送满意度是一个关键指标,它反映了工位点对物料送达时间的偏好程度。在实际生产过程中,物料送达时间的准确性对生产进度有着至关重要的影响。因此,本文将工位点对物料送达时间的偏好程度量化为配送满意度,并引入模糊数隶属度函数,将工位点可接受的时间窗模糊化。这种模糊化处理能够更真实地反映实际生产中的时间需求,提高模型的适用性。
在模糊化处理的基础上,本文采用梯形模糊数时间窗来表示配送满意度随AGV送达物料时间的变化程度。梯形模糊数时间窗具有灵活性高、易于计算等优点,能够准确描述配送满意度与时间之间的关系。同时,为了量化配送成本,本文建立了关于违反梯形模糊时间窗约束的惩罚成本的时间窗,并将配送总成本表示为AGV的固定成本、运输成本和惩罚成本之和。这种成本计算方法能够全面反映AGV物料配送过程中的各项费用,为优化路径规划提供了有力支持。
(2)NSGA-Ⅱ算法在多目标配送路径规划问题中的应用
为了求解上述多目标路径规划问题,本文采用了非支配排序遗传算法Ⅱ(NSGA-Ⅱ)。NSGA-Ⅱ是一种基于遗传算法的多目标优化算法,具有收敛速度快、全局搜索能力强等优点。在求解过程中,NSGA-Ⅱ算法通过选择、交叉、变异等遗传操作,不断迭代更新种群,最终得到一组非支配解集,即Pareto最优解集。
为了验证NSGA-Ⅱ算法在求解多目标配送路径规划问题中的优越性,本文利用NSGA-Ⅱ算法和遗传算法对Solomon基准测试集中的RC208算例进行求解。实验结果表明,NSGA-Ⅱ算法在求解效率和解的质量上均优于遗传算法。同时,本文还对比了NSGA-Ⅱ算法在不同AGV数量约束下的性能表现,确定了本文AGV数量约束条件。这一研究为实际生产中的AGV数量配置提供了理论依据。
然而,传统的NSGA-Ⅱ算法在求解路径规划问题时仍存在一些不足,如对初始种群依赖性高、收敛速度慢等问题。为了克服这些缺点,本文提出了一种改进的NSGA-Ⅱ算法。在改进算法中,利用最小成本最近邻法改进初始种群的生成方式,提高了初始种群的多样性和质量。同时,引入精英保留策略来代替传统NSGA-Ⅱ算法中的精英选择策略,进一步加快了算法的收敛速度。此外,还加入了自适应交叉变异算子,在NSGA-Ⅱ算法的不同进化时期,自动调整算法的交叉率和变异率,提高了算法的搜索效率和全局优化能力。
(3)改进NSGA-Ⅱ算法的有效性验证与仿真分析
为了验证改进后NSGA-Ⅱ算法的有效性,本文利用改进前后的NSGA-Ⅱ算法对RC208算例进行求解,并对比了两种算法的性能表现。实验结果表明,改进后的NSGA-Ⅱ算法在求解效率和解的质量上均优于改进前的算法。这一结果证明了改进算法在求解多目标配送路径规划问题中的优越性。
为了进一步验证改进算法的有效性,本文还利用Any Logic仿真软件对算法结果进行仿真建模。通过仿真分析,可以直观地观察AGV的配送过程,包括AGV的行驶路径、配送时间等关键信息。仿真结果表明,改进后的NSGA-Ⅱ算法能够生成更加合理、高效的配送路径,提高了AGV的配送效率和准确性。同时,仿真分析还揭示了AGV在配送过程中的潜在问题和优化空间,为后续的算法改进和实际应用提供了有力支持。
% 初始化参数
pop_size = 100; % 种群规模
max_gen = 200; % 最大迭代次数
cross_rate = 0.8; % 交叉率(初始值)
mutation_rate = 0.1; % 变异率(初始值)
num_AGVs = 5; % AGV数量
% 读取地图数据(假设地图数据已存储在变量map中)
% map = ...;
% 初始化种群
population = initialize_population(pop_size, num_AGVs, map);
% 记录每一代的Pareto最优解集
pareto_fronts = cell(max_gen, 1);
for gen = 1:max_gen
% 计算适应度值(包括配送满意度和配送总成本)
fitness = calculate_fitness(population, map);
% 非支配排序
[sorted_population, fronts] = non_dominated_sorting(fitness);
pareto_fronts{gen} = fronts{1}; % 记录当前代的Pareto最优解集
% 选择操作(采用锦标赛选择)
mating_pool = selection_tournament(sorted_population, pop_size);
% 交叉操作
offspring = crossover(mating_pool, cross_rate);
% 变异操作
offspring = mutation(offspring, mutation_rate);
% 更新种群
population = offspring;
% 自适应调整交叉率和变异率(根据当前代的进化情况)
[cross_rate, mutation_rate] = adapt_rates(gen, max_gen, cross_rate, mutation_rate);
end
% 输出最终的Pareto最优解集
disp('最终的Pareto最优解集:');
disp(pareto_fronts{end});
% 辅助函数定义(以下仅为示例,具体实现需根据实际问题进行编写)
function population = initialize_population(pop_size, num_AGVs, map)
% 初始化种群(随机生成初始路径)
% ...
end
function fitness = calculate_fitness(population, map)
% 计算适应度值(包括配送满意度和配送总成本)
% ...
end
function [sorted_population, fronts] = non_dominated_sorting(fitness)
% 非支配排序算法实现
% ...
end
function mating_pool = selection_tournament(sorted_population, pop_size)
% 锦标赛选择算法实现
% ...
end
function offspring = crossover(mating_pool, cross_rate)
% 交叉操作算法实现
% ...
end
function offspring = mutation(offspring, mutation_rate)
% 变异操作算法实现
% ...
end
function [cross_rate, mutation_rate] = adapt_rates(gen, max_gen, cross_rate, mutation_rate)
% 自适应调整交叉率和变异率算法实现
% ...
% 例如,可以根据当前代的进化情况动态调整交叉率和变异率
cross_rate = cross_rate * (1 - gen / max_gen) + 0.1; % 示例调整公式
mutation_rate = mutation_rate * (1 - gen / max_gen) + 0.01; % 示例调整公式
end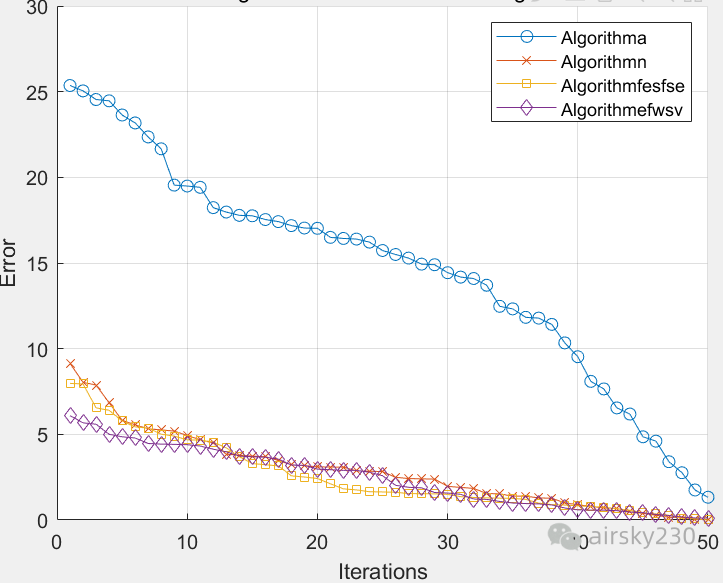



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











