






本文来自http://blog.csdn.net/hellogv/ ,引用必须注明出处!
OpenSURF is a clean, unintrusive SURF feature extraction library written in C++ with OpenCV.
The OpenSURF library was originally written in Visual Studio 2005, although a linux compatible makefile has been contributed and is available in the SVN directory.
最近工作有点闲,有时间就玩点有意思的东西------SURF 图像识别(WIKI地址),懂了图像识别,真的有很多东西可以玩。。。。。先看看本文实现的效果:


左图不是相同的指纹,右图为相同的指纹
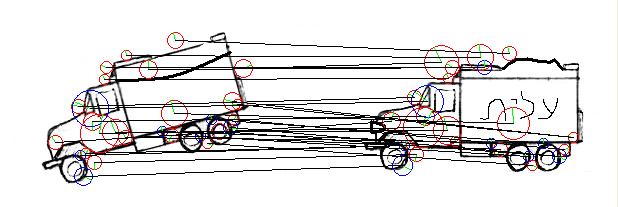
ShapeContext算法中典型的实验图片。。。借来用用而已。。。
本文修改后的代码可以到这里:http://download.csdn.net/source/2515577下载,本文的代码改自GoogleCode的OpenSource。
网上已经有很多封装好的SURF算法,这里我挑OpenSURF.OpenSURF在GoogleCode的地址http://code.google.com/p/opensurf1/,在【Source】 Tab里有C++版和C#版,C++版依赖Opencv,C#版不依赖OpenCV,我选择了C#版裸奔SURF。。。。在使用OpenSURF的C#版发现两个问题:
1。没有Match模块,所以这个就得自己写了;
2。OpenSURF for C#竟然大量使用GetPixel() ...... -. -||| ......做过图像处理的兄弟都应该知道GetPixel()的效率...........这个也得自己改改。
解决问题1:C++版包含了Match模块,所以我就参考C++版的,写成C#。。。。。以下是我自己添加的Match代码:
- using System;
- using System.Collections.Generic;
- using System.Text;
- using OpenSURFcs;
- class Utils
- {
- private const float FLT_MAX = 3.402823466e+38F; /* max value */
- public static List<IPoint>[] getMatches(List<IPoint> ipts1, List<IPoint> ipts2)
- {
- double dist;
- double d1, d2;
- IPoint match = new IPoint();
- List<IPoint>[] matches = new List<IPoint>[2];
- matches[0] = new List<IPoint>();
- matches[1] = new List<IPoint>();
- for (int i = 0; i < ipts1.Count; i++)
- {
- d1 = d2 = FLT_MAX;
- for (int j = 0; j < ipts2.Count; j++)
- {
- dist = GetDistance(ipts1[i], ipts2[j]);
- if (dist < d1) // if this feature matches better than current best
- {
- d2 = d1;
- d1 = dist;
- match = ipts2[j];
- }
- else if (dist < d2) // this feature matches better than second best
- {
- d2 = dist;
- }
- }
- // If match has a d1:d2 ratio < 0.65 ipoints are a match
- if (d1 / d2 < 0.77) //越小Match点越少
- {
- matches[0].Add(ipts1[i]);
- matches[1].Add(match);
- }
- }
- return matches;
- }
- private static double GetDistance(IPoint ip1, IPoint ip2)
- {
- float sum = 0.0f;
- for (int i = 0; i < 64; ++i)
- sum += (ip1.descriptor[i] - ip2.descriptor[i]) * (ip1.descriptor[i] - ip2.descriptor[i]);
- return Math.Sqrt(sum);
- }
- }
解决问题2:参考网上的代码,把IntegralImage.cs的FromImage(Bitmap image)函数改成:
- public static IntegralImage FromImage(Bitmap image)
- {
- IntegralImage pic = new IntegralImage(image.Width, image.Height);
- float rowsum = 0;
- /* for (int y = 0; y < image.Height; y++)
- {
- rowsum = 0;
- for (int x = 0; x < image.Width; x++)
- {
- Color c = image.GetPixel(x, y);
- rowsum += (cR * c.R + cG * c.G + cB * c.B) / 255f;
- // integral image is rowsum + value above
- if(y==0)
- pic[0, x] = rowsum;
- else
- pic[y, x] = rowsum + pic[y - 1, x];
- }
- }*/
- BitmapData dataIn = image.LockBits(new Rectangle(0, 0, image.Width, image.Height), ImageLockMode.ReadOnly, PixelFormat.Format24bppRgb);
- unsafe
- {
- byte* pIn = (byte*)(dataIn.Scan0.ToPointer());
- for (int y = 0; y < dataIn.Height; y++)
- {
- rowsum = 0;
- for (int x = 0; x < dataIn.Width; x++)
- {
- int cb = (byte)( pIn[0]);
- int cg = (byte)(pIn[1]);
- int cr = (byte)(pIn[2]);
- // 0 1 2代表的次序是B G R
- rowsum += (cR * cr + cG * cg + cB * cb) / 255f;
- // integral image is rowsum + value above
- if (y == 0)
- pic[0, x] = rowsum;
- else
- pic[y, x] = rowsum + pic[y - 1, x];
- pIn += 3;
- }
- pIn += dataIn.Stride - dataIn.Width * 3;
- }
- }
- image.UnlockBits(dataIn);
- return pic;
- }
OK,解决了以上两个问题,OpenSURF的C#版功能算是跟C++差不多了。。。。当然,C#跟C++的速度还有点差距的。。。。接下来就说说如何提高识别率,有两个关键的系数要微调的:
1。FastHessian.getIpoints(0.0001f, 5, 2, iimg);的第一个参数决定了特征点的数量,越小则特征点越多;
2。在Utils.cs里面的if (d1 / d2 < 0.77) //越小匹配的点越少,但误判断点也越少;越大匹配的点越多,但误判断点也越多。
以上两个要微调的函数就要具体情况具体微调了。。。。














 5901
5901











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









