







lcd的工作,在kernel中有device和driver两个描述,这也是必然
在上一节中我们详解介绍了 s3cfb_main.c ——-probe函数的框架。
回顾一下probe函数的作用:
1. 获取平台设备 device中的资源
2. 对设备做了一下相应的初始化
3. 申请了fb_info ,根据要求进行了填充
4. 向内核提交了fb_info
5. 使能设备等
6. 创建属性文件
接下来我们来详解介绍probe中的函数:
第一个函数: s3cfb_set_lcd_info(fbdev[i]);
上一节我们是这样说的
//这个函数是获取具体设备的参数的,跟s3cfb_wa101s.c有关
// 在这个函数中我们看到如何通过硬件拨码开关选择lcd硬件
//讲在下面介绍
1.该函数源码如下:
/*该函数在s3cfb_wa101s.c 中*/
/* name should be fixed as 's3cfb_set_lcd_info' */
void s3cfb_set_lcd_info(struct s3cfb_global *ctrl)
{
s3cfb_setup_lcd(); //由硬件选择设备,初始化相应参数
wa101.init_ldi = NULL;
ctrl->lcd = &wa101; //让全局结构体指向该设备
}在介绍 这个函数之前,我们先来看看wa101是什么
#include "s3cfb.h"
static struct s3cfb_lcd wa101 = {
#if 0//smdk
// .width = 1366,
.width = 1360,
.height = 768,
.bpp = 24,
.freq = 60,
.timing = {
.h_fp = 48,
.h_bp = 80,
。。。。。。。。。。
}
//该结构体如下:
struct s3cfb_lcd {
int width;//设备宽
int height;//设备高
int bpp;//设备的bpp
int freq;//刷新頻度
struct s3cfb_lcd_timing timing; //与硬件时序参数
struct s3cfb_lcd_polarity polarity;
void (*init_ldi)(void);
void (*deinit_ldi)(void);
};
//由此可以看出wa101 就是一个描述lcd硬件设备的结构体。好先看 s3cfb_setup_lcd();的作用
void s3cfb_setup_lcd()
{
#if 1
int type = get_lcd_type(); //获得type来选择什么样的硬件初始化
//printk("************** type = %d\n", type);
if(0x0 == type) //9.7
{
wa101.width = 1024;
wa101.height = 768;
wa101.bpp = 24;
。。。。。。。。
}
else if(0x1 == type) //7.0
{
。。。。。。。。 }
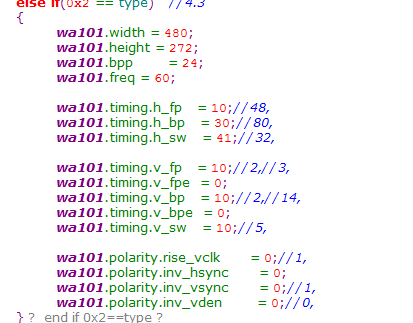
else if(0x2 == type) //4.3
{
wa101.width = 480;
wa101.height = 272;
wa101.bpp = 24;
wa101.freq = 60;
。。。。。。。。。。。。。。。
}。。。。。。。。。
#endif
} 好来看看type如何获得:get_lcd_type 在board文件中
int get_lcd_type()
{
int value1, value2, type = 0;
int flags = 0;
value1 = gpio_get_value(EXYNOS4_GPC0(3));
value2 = gpio_get_value(EXYNOS4_GPX0(6));
type = (value1<<1)|value2;
printk("value1 = %d, value2 = %d, type = 0x%x\n", value1, value2, type);
return type;
}
EXPORT_SYMBOL(get_lcd_type);由此可以看出type 由硬件 gpc0(3) gpx0(6) 两个硬件决定,来我们看看原理图:
外围板
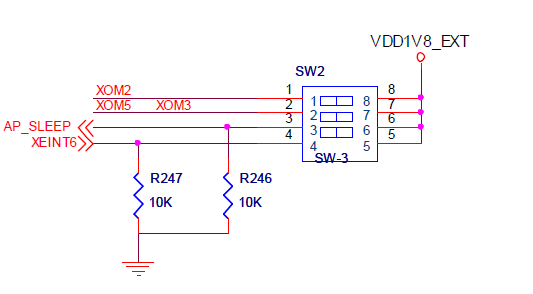
核心板 gpx0_6

核心板 gpc0_3

这就是拨码开关自适应屏的原理。这里我用的 4.3 小屏 type 为0x2
第二个函数: pdata->cfg_gpio(pdev);
/* platform_data*/
pdata = to_fb_plat(&pdev->dev);
if (pdata->cfg_gpio)
pdata->cfg_gpio(pdev); /初始化io
//初始化io的函数,在device s3cfb_set_platdata函数中指定的
s3cfb_get_clk_name(npd->clk_name); //获取时钟
npd->cfg_gpio = s3cfb_cfg_gpio; //获取引脚操作函数
//以上是device描述的
//该函数在setup-fb-s5p.c 中
void s3cfb_cfg_gpio(struct platform_device *pdev)
{ 。。。。。
s3cfb_gpio_setup_24bpp(EXYNOS4_GPF0(0), 8, S3C_GPIO_SFN(2), S5P_GPIO_DRVSTR_LV4);
s3cfb_gpio_setup_24bpp(EXYNOS4_GPF1(0), 8, S3C_GPIO_SFN(2), S5P_GPIO_DRVSTR_LV4);
s3cfb_gpio_setup_24bpp(EXYNOS4_GPF2(0), 8, S3C_GPIO_SFN(2), S5P_GPIO_DRVSTR_LV4);
s3cfb_gpio_setup_24bpp(EXYNOS4_GPF3(0), 4, S3C_GPIO_SFN(2), S5P_GPIO_DRVSTR_LV4);
。。。。。。。。。。。。。。
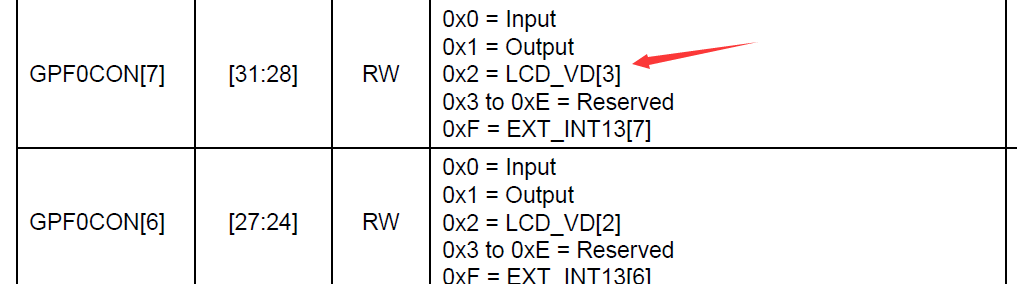
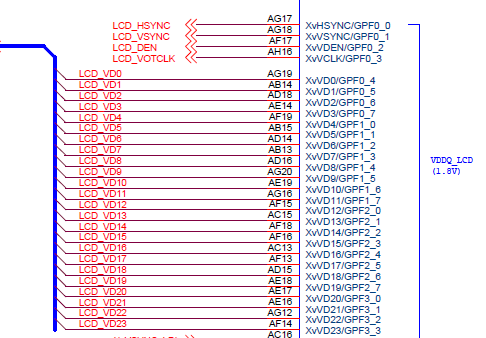
} 设置引脚的函数主要是把GFP0(0-7) GPF1(0-7) GPF2(0-7) GPF3(0-3) 设置成lcd模式:
好原理图和芯片手册如下:
第三个函数: pdata->cfg_gpio(pdev);
//该函数也是在device中
3cfb_get_clk_name(npd->clk_name); //获取时钟
npd->lcd_off = s3cfb_lcd_off;//关闭lcd 设备
npd->clk_on = s3cfb_clk_on; // 时钟开
//时钟的名字有第一节就知道了:sclk_fimd
if (pdata->clk_on)
pdata->clk_on(pdev, &fbdev[i]->clock); //s3cfb_clk_on 函数在setup-fb-s5p.c 中,函数原型如下:
int s3cfb_clk_on(struct platform_device *pdev, struct clk **s3cfb_clk)
{
struct clk *sclk = NULL;
struct clk *mout_mpll = NULL;
struct clk *lcd_clk = NULL;
u32 rate = 0;
int ret = 0;
lcd_clk = clk_get(&pdev->dev, "lcd");
if (IS_ERR(lcd_clk)) {
dev_err(&pdev->dev, "failed to get operation clk for fimd\n");
goto err_clk0;
}
ret = clk_enable(lcd_clk);
if (ret < 0) {
dev_err(&pdev->dev, "failed to clk_enable of lcd clk for fimd\n");
goto err_clk0;
}
clk_put(lcd_clk);
sclk = clk_get(&pdev->dev, "sclk_fimd");
if (IS_ERR(sclk)) {
dev_err(&pdev->dev, "failed to get sclk for fimd\n");
goto err_clk1;
}
if (soc_is_exynos4210())
mout_mpll = clk_get(&pdev->dev, "mout_mpll");
else
mout_mpll = clk_get(&pdev->dev, "mout_mpll_user");
if (IS_ERR(mout_mpll)) {
dev_err(&pdev->dev, "failed to get mout_mpll for fimd\n");
goto err_clk2;
}
ret = clk_set_parent(sclk, mout_mpll);
if (ret < 0) {
dev_err(&pdev->dev, "failed to clk_set_parent for fimd\n");
goto err_clk2;
}
ret = clk_set_rate(sclk, 800000000);
if (ret < 0) {
dev_err(&pdev->dev, "failed to clk_set_rate of sclk for fimd\n");
goto err_clk2;
}
dev_dbg(&pdev->dev, "set fimd sclk rate to %d\n", rate);
clk_put(mout_mpll);
ret = clk_enable(sclk);
if (ret < 0) {
dev_err(&pdev->dev, "failed to clk_enable of sclk for fimd\n");
goto err_clk2;
}
*s3cfb_clk = sclk;
return 0;
err_clk2:
clk_put(mout_mpll);
err_clk1:
clk_put(sclk);
err_clk0:
clk_put(lcd_clk);
return -EINVAL;
}
//由上可知,该函数主要使能lcd_clk fimd_sclk第四个函数: pdata->cfg_gpio(pdev);
/故名思议这是对硬件的初始化,里面主要是对exynos4412的寄存器设置所有会调到 s3cfb_fimd6x.c 中的寄存器操作,将在下面详细介绍
int s3cfb_init_global(struct s3cfb_global *fbdev)
{
fbdev->output = OUTPUT_RGB; //指定了输出格式
fbdev->rgb_mode = MODE_RGB_P;//指定了rgb模式
fbdev->wq_count = 0; //等待队列技术清零
init_waitqueue_head(&fbdev->wq);//初始化等到队列
mutex_init(&fbdev->lock);//初始化锁
s3cfb_set_output(fbdev); //设置输出格式
s3cfb_set_display_mode(fbdev);//设置模式
s3cfb_set_polarity(fbdev);//设置引脚极性
s3cfb_set_timing(fbdev);//设置时序
s3cfb_set_lcd_size(fbdev);//设置lcd大小
return 0;
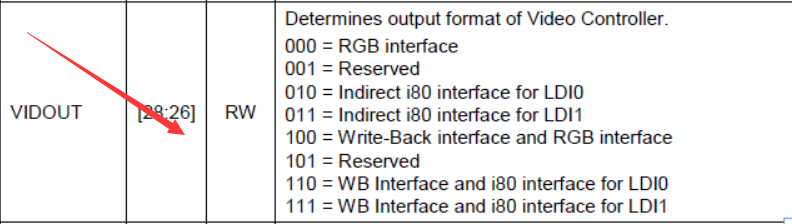
}指定了输出的格式(这里设置输出的是RGB数据),并未写入寄存器( 此功能由s3cfb_set_output来完成 ),支持格式如下:
enum s3cfb_output_t {
OUTPUT_RGB,
OUTPUT_ITU,
OUTPUT_I80LDI0,
OUTPUT_I80LDI1,
OUTPUT_WB_RGB,
OUTPUT_WB_I80LDI0,
OUTPUT_WB_I80LDI1,
};
输出格式请参考如下手册:Exynos4412 User Manual (Public) version 1.0
rgb模式
enum s3cfb_rgb_mode_t {
MODE_RGB_P = 0,
MODE_BGR_P = 1,
MODE_RGB_S = 2,
MODE_BGR_S = 3,
};
模式参考数据手册:


来看看格式设置函数:s3cfb_set_output(fbdev); //设置输出格式
int s3cfb_set_output(struct s3cfb_global *ctrl)
{
u32 cfg;
cfg = readl(ctrl->regs + S3C_VIDCON0);
cfg &= ~S3C_VIDCON0_VIDOUT_MASK;
//清楚vidcon0寄存器26-28 位数据--也就是上面手册上的
//VOUT
if (ctrl->output == OUTPUT_RGB)
cfg |= S3C_VIDCON0_VIDOUT_RGB; //我们的选择
//宏定义如下#define S3C_VIDCON0_VIDOUT_RGB (0 << 26)
else if (ctrl->output == OUTPUT_ITU)
cfg |= S3C_VIDCON0_VIDOUT_ITU;
else if (ctrl->output == OUTPUT_I80LDI0)
cfg |= S3C_VIDCON0_VIDOUT_I80LDI0;
else if (ctrl->output == OUTPUT_I80LDI1)
cfg |= S3C_VIDCON0_VIDOUT_I80LDI1;
else if (ctrl->output == OUTPUT_WB_RGB)
cfg |= S3C_VIDCON0_VIDOUT_WB_RGB;
else if (ctrl->output == OUTPUT_WB_I80LDI0)
cfg |= S3C_VIDCON0_VIDOUT_WB_I80LDI0;
else if (ctrl->output == OUTPUT_WB_I80LDI1)
cfg |= S3C_VIDCON0_VIDOUT_WB_I80LDI1;
else {
dev_err(ctrl->dev, "invalid output type: %d\n", ctrl->output);
return -EINVAL;
}
writel(cfg, ctrl->regs + S3C_VIDCON0);//写入的exynos VIDCON0 寄存器
cfg = readl(ctrl->regs + S3C_VIDCON2);
cfg &= ~(S3C_VIDCON2_WB_MASK | S3C_VIDCON2_TVFORMATSEL_MASK | \
S3C_VIDCON2_TVFORMATSEL_YUV_MASK); //清楚掩码
if (ctrl->output == OUTPUT_RGB)
cfg |= S3C_VIDCON2_WB_DISABLE;
//#define S3C_VIDCON2_WB_DISABLE (0 << 15)
//在这里是兼容接口,在这里无用
else if (ctrl->output == OUTPUT_ITU)
cfg |= S3C_VIDCON2_WB_DISABLE;
else if (ctrl->output == OUTPUT_I80LDI0)
cfg |= S3C_VIDCON2_WB_DISABLE;
else if (ctrl->output == OUTPUT_I80LDI1)
cfg |= S3C_VIDCON2_WB_DISABLE;
else if (ctrl->output == OUTPUT_WB_RGB)
cfg |= (S3C_VIDCON2_WB_ENABLE | S3C_VIDCON2_TVFORMATSEL_SW | \
S3C_VIDCON2_TVFORMATSEL_YUV444);
else if (ctrl->output == OUTPUT_WB_I80LDI0)
cfg |= (S3C_VIDCON2_WB_ENABLE | S3C_VIDCON2_TVFORMATSEL_SW | \
S3C_VIDCON2_TVFORMATSEL_YUV444);
else if (ctrl->output == OUTPUT_WB_I80LDI1)
cfg |= (S3C_VIDCON2_WB_ENABLE | S3C_VIDCON2_TVFORMATSEL_SW | \
S3C_VIDCON2_TVFORMATSEL_YUV444);
else {
dev_err(ctrl->dev, "invalid output type: %d\n", ctrl->output);
return -EINVAL;
}
writel(cfg, ctrl->regs + S3C_VIDCON2);
return 0;
}2 .s3cfb_set_display_mode(fbdev);//设置模式
函数原型如下:
int s3cfb_set_display_mode(struct s3cfb_global *ctrl)
{
u32 cfg;
cfg = readl(ctrl->regs + S3C_VIDCON0);
cfg &= ~S3C_VIDCON0_PNRMODE_MASK; //对VIDCON0 的17,18 清空,可以看到上的寄存器图
cfg |= (ctrl->rgb_mode << S3C_VIDCON0_PNRMODE_SHIFT);
//前面fbdev->rgb_mode = MODE_RGB_P ;也就是0
writel(cfg, ctrl->regs + S3C_VIDCON0);
//所以把VIDCON0 的17 ,18 为都设置成了0,也就rgb并行口,正常模式
return 0;
}3 s3cfb_set_polarity(fbdev);//设置引脚极性
源码如下:
int s3cfb_set_polarity(struct s3cfb_global *ctrl)
{
struct s3cfb_lcd_polarity *pol;
u32 cfg;
pol = &ctrl->lcd->polarity;
cfg = 0;
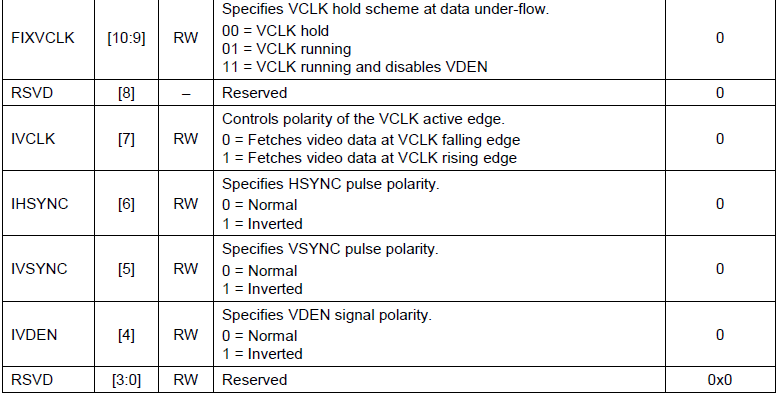
/* Set VCLK hold scheme */
cfg &= S3C_VIDCON1_FIXVCLK_MASK;
cfg |= S3C_VIDCON1_FIXVCLK_VCLK_RUN;
if (pol->rise_vclk)
cfg |= S3C_VIDCON1_IVCLK_RISING_EDGE;
if (pol->inv_hsync)
cfg |= S3C_VIDCON1_IHSYNC_INVERT;
if (pol->inv_vsync)
cfg |= S3C_VIDCON1_IVSYNC_INVERT;
if (pol->inv_vden)
cfg |= S3C_VIDCON1_IVDEN_INVERT;
writel(cfg, ctrl->regs + S3C_VIDCON1);
return 0;
}主要是对 vden vsynsc hsync vclk 使能信号,垂直同步信号,行同步信号,vclk触发方式。
要知道这些功能,首先了解 lcd 显示原理,和这几个信号的做用。
要设置的话 必须根据原理图 和两个数据手册:exynos4412 和 lcd控制芯片
Exynos4412 User Manual (Public) version 1.0
WXCAT43-TG6#001_V1.0
exynos 关联位 4-vden 5-vsync 6-hsync 7-vclk
在wa101中 vden vsynsc hsync vclk 都是0 ,这些数据的由来,得分别看exynos 和lcd 的工作时序图:
exynos4412
exynos中 DE 是高电平触发,clk 触发方式(需要指定),hsync 是高脉冲触发 ,vsynsc 是高脉冲触发
WXCAT43:
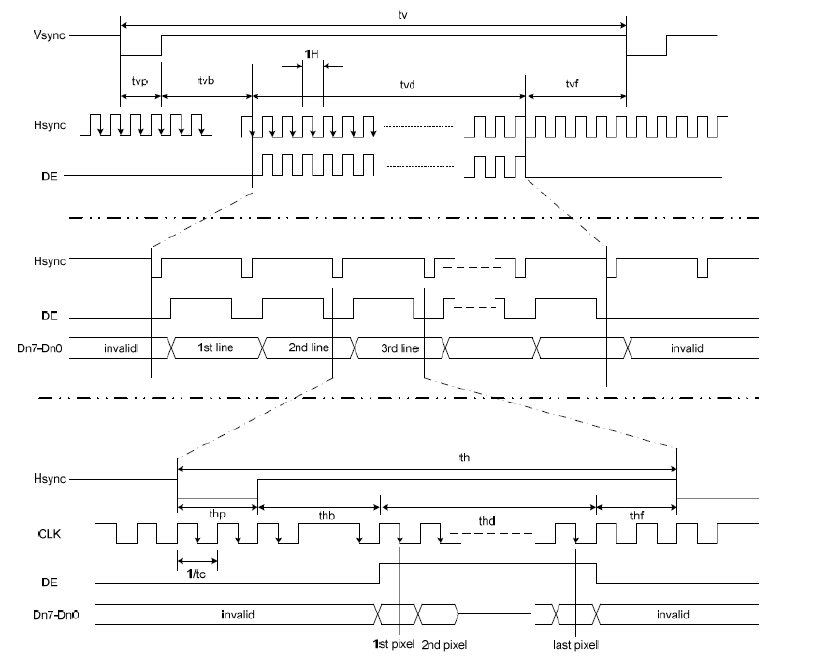
两个都看了,lcd 硬件中 DE 是高电平触发,clk 是下降沿触发,hsync 是低脉冲触发 ,vsynsc 是低脉冲触发
综合:要驱动lcd设备:
exynos 要设置成lcd触发有效的相应模式
de----高电平触发--不反转
clk---下降沿触发 ----相应位设置成0
hsync---是低脉冲触发----反转
vsyns ---是低脉冲触发---反转再看数据和代码:
由此代码 发现vclk 和vden 都是正确的,而hsync 和vsync 并没有反转 (这是神马?????)
(经测试把 wa101.polarity.rise_vclk = 0;//1,
wa101.polarity.inv_hsync = 1;
wa101.polarity.inv_vsync = 1;//1,
wa101.polarity.inv_vden = 0;//0,
设置成这样,设备依然能正常运行,我也是醉了)
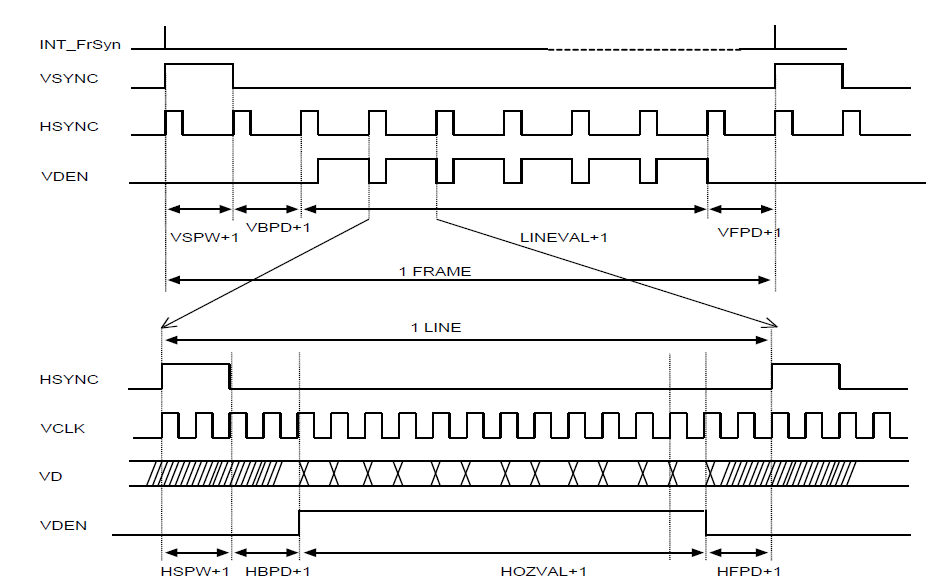
4 s3cfb_set_timing(fbdev);//设置时序
代码原型如下:
int s3cfb_set_timing(struct s3cfb_global *ctrl)
{
struct s3cfb_lcd_timing *time;
u32 cfg;
time = &ctrl->lcd->timing;
cfg = 0;
cfg |= S3C_VIDTCON0_VBPDE(time->v_bpe - 1);
cfg |= S3C_VIDTCON0_VBPD(time->v_bp - 1);
cfg |= S3C_VIDTCON0_VFPD(time->v_fp - 1);
cfg |= S3C_VIDTCON0_VSPW(time->v_sw - 1);
writel(cfg, ctrl->regs + S3C_VIDTCON0);
cfg = 0;
cfg |= S3C_VIDTCON1_VFPDE(time->v_fpe - 1);
cfg |= S3C_VIDTCON1_HBPD(time->h_bp - 1);
cfg |= S3C_VIDTCON1_HFPD(time->h_fp - 1);
cfg |= S3C_VIDTCON1_HSPW(time->h_sw - 1);
writel(cfg, ctrl->regs + S3C_VIDTCON1);
return 0;
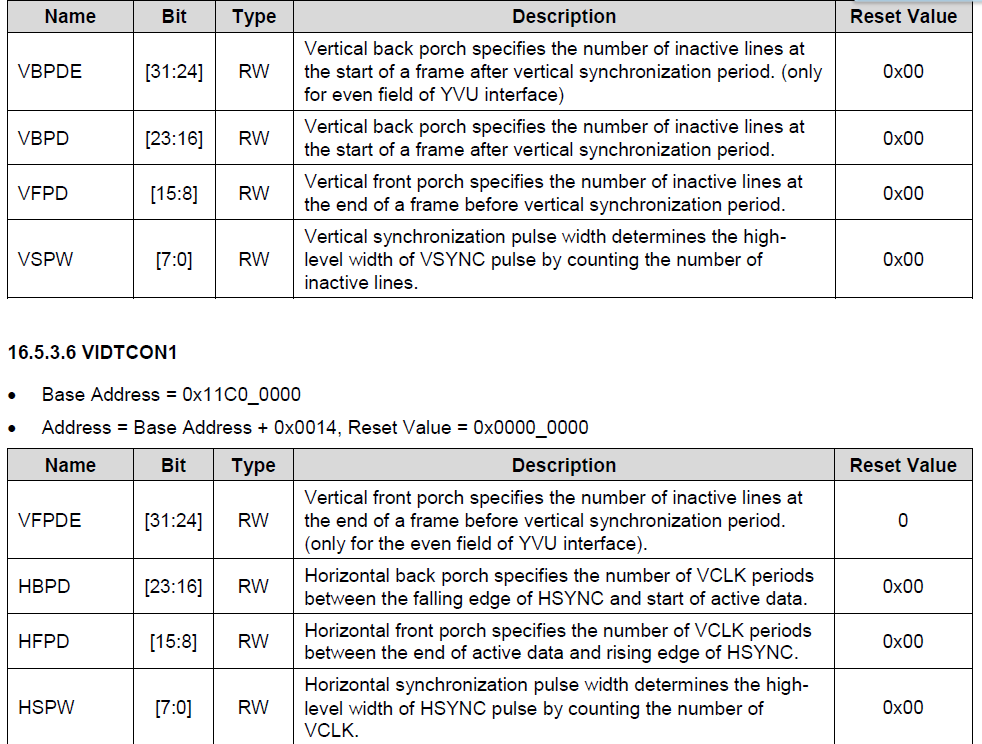
}这个函数主要供能是设置各种时序和脉冲宽度。
VIDTCON0
VIDTCON1 数据手册如下:
本来这应该看exynos 和WXCAT43 分别对应求得的。
而这里跟经验,小小的偷了一下懒 (此方法一般有效,特殊情况除外)
VSPW -----------------(Vertical pulse width);
VFPD -----------------(Vertical front porch)
VBPD -----------------(Vertical back porch)
VBPDE -----------------是yuv才用的着,这里可以不用设置
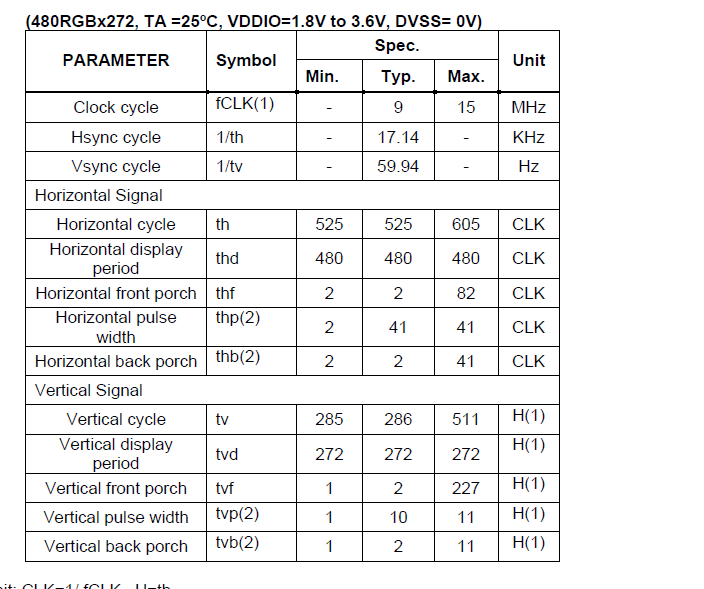
行的参数类似这里不做介绍。由于该值有一定的范围,一般我们是按推荐typ 设置这里可以看到,在itop提供的源码里跟标准的还有是有一些不同。只要在范围内就好了。
5、s3cfb_set_lcd_size(fbdev);//设置lcd大小
int s3cfb_set_lcd_size(struct s3cfb_global *ctrl)
{
u32 cfg = 0;
#ifdef CONFIG_FB_S5P_WA101S
cfg |= S3C_VIDTCON2_HOZVAL(ctrl->lcd->width - 1);
#else
cfg |= S3C_VIDTCON2_HOZVAL(ctrl->lcd->width - 1);
#endif
cfg |= S3C_VIDTCON2_LINEVAL(ctrl->lcd->height - 1);
writel(cfg, ctrl->regs + S3C_VIDTCON2);
return 0;
}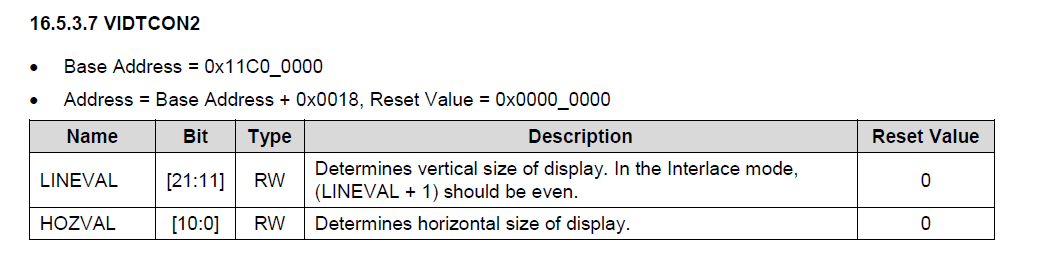
宽和高的设置:
至此: global init 到此结束:
该函数完成,回顾一下主要设置:
output—–指定输出格式为RGB
display —-指定输出的rgb格式为normal ,且是并行输出
polartiy —-设置触发极性
timing —– 设置时间参数
lcd_size —–设置大小参数
好现在又可以回到probe函数中了,由于内容过长,剩下的函数将在下一节中介绍,
未完待续。。。。。















 2858
2858











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









