







本文内容参考《数字图像处理基础》Wilhelm Burger等著。
根据图像数组获得边缘检测信息,然后循着已检测到的边缘点找到轮廓线。
轮廓跟踪:从那些边缘强度较大的地方开始,沿着两个不同方向跟踪边缘点,直到这两条轨迹相遇并形成一条闭合的轮廓线。(灰度梯度弱——>边缘消失;交叉边缘——>歧义)
边缘图:通过“阈值运算”对一个“图像像素”是否属于边缘点做“二值判断”(这里需要被判断的“图像像素”是指由“各种边缘检测算子得到的边缘强度”,“阈值”可以是固定的,也可以说是自适应的),经过“阈值运算”的结果存为一张“二值的边缘图像”,即“边缘图”。
全局阈值化处理的后处理方法,如霍夫变换,能很好处理不完整的边缘图。
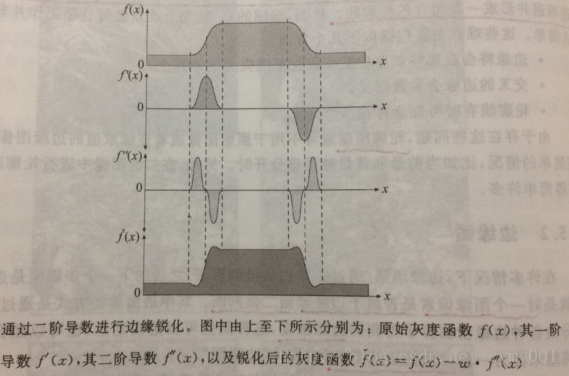
边缘锐化:
从原图像函数
f(x)
上减去其二阶导数
f′′(x)
的一部分,如下图:
二维函数
f(x,y)
的拉普拉斯算子
Δf(x,y)=∂2f∂2x(x,y)+∂2f∂2y(x,y)
由中心差分公式易得
HLx=∂2f∂2x(x,y)=(1−21),HLy=∂2f∂2y(x,y)=⎛⎝⎜1−21⎞⎠⎟
则
HL=HLx+HLy=⎛⎝⎜0101−41010⎞⎠⎟
接下来对原图像
I
,用
拉普拉斯滤波器对噪声相当敏感,可以采用预平滑措施(如高斯平滑)减弱噪声的影响。














 389
389











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









