






Nguyen, V., et al. (2007)."A comparison of line extraction algorithms using 2D range data for indoor mobile robotics." Autonomous Robots 23(2): 97-111.
论文提出了6中从二维激光扫描数据中提取线段的方法
1.分割合并算法
有的时候十分烦那些斜着的连线,实际不是想要的。
2.回归方法
先聚类,再回归
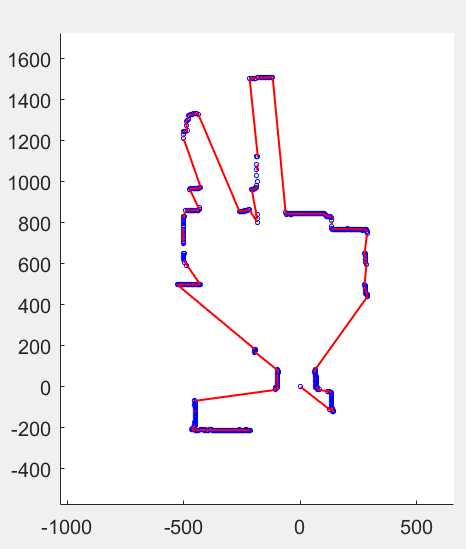
3.累积、区域生长算法
感觉对噪声数据真的没办法了,窝成一团的点,提取的线十分破碎而且乱...
 View Code
View Code
4.Ransac方法
5.霍夫变换方法
6.EM方法














 2718
2718











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









