







单片机对步进电机的控制(一)
——步进电机的基本原理
步进电机也叫步进器,它利用电磁学的原理,将电能转换为机械能。人们早在20世纪20年代就开始使用这种电机,随着嵌入式系统的日益流行,步进电机的使用也开始暴增,它被应用于各个领域,因此掌握步进电机的组成和使用原理是必须的。在讲解之前先复习一下相关理论知识。

一、相关理论知识点复习
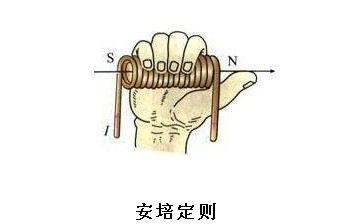
1、安培定则
安培定则,也叫右手螺旋定则,是表示电流和电流激发磁场的磁感线方向间关系的定则。通电直导线中的安培定则(安培定则一):用右手握住通电直导线,让大拇指指向电流的方向,那么四指的指向就是磁感线的环绕方向;通电螺线管中的安培定则(安培定则二):用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端是通电螺线管的N极。
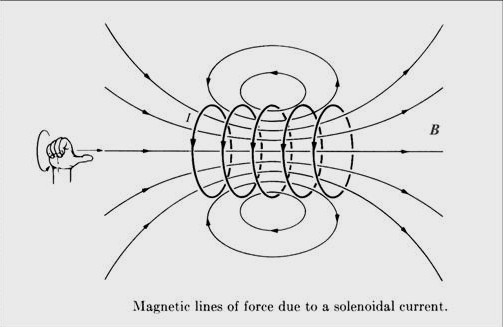
2、通电螺线圈中磁场的分布
通电螺线圈中磁场的分布如下图所示,知道电流的流向以后根据安培定则可以判断出通电螺线圈的两极。当把小磁针放在线圈周围的时候,小磁针会因磁性的不同做出一定的反应。特别的当放入螺线圈内部是,如下图所示的螺线圈,小磁针的北极应指向右侧。
二、步进电机的基本原理
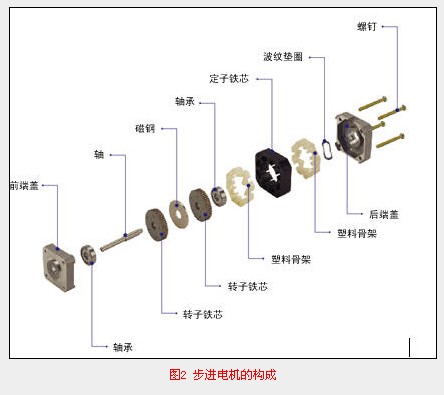
在讲述步进电机的工作原理之前让我们先对步进电机有个感性的认识,常见的步进电机物理器件构成如图2所示:
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机有许多种形状和尺寸,但不论形状和尺寸如何,它们都可以归为两类:可变磁阻步进电机和永磁步进电机。本文主要讲解的是最常用的永磁步进电机。
三:步进电机的工作原理
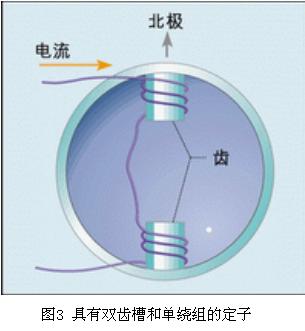
如图3所示,步进电机是由一组缠绕在电机固定部件——定子齿槽上的线圈驱动的。通常情况下,一根绕成圈状的金属丝叫做螺线管,而在电机中,绕在齿上的金属丝则叫做绕组、线圈或相。如果线圈中的电流如图3所示,并且从电机顶部向下看齿槽的顶部,那么电流在绕两个齿槽按逆时针流向流动。根据安培定律和右手准则,这样的电流会产生一个北极向上的磁场。
现在假设我们构造一个定子上缠绕有两个绕组的电机,内置一个能够绕中心任意转动的永久磁铁,这个可旋转部分叫做转子。
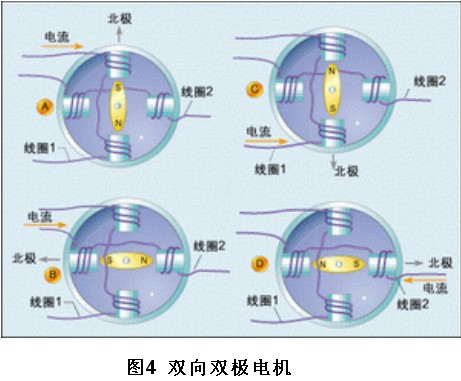
图4给出了一种简单的电机,叫做双相双极电机,因为其定子上有两个绕组,而且其转子有两个磁极。如果我们按图4(a)所示方向给绕组1输送电流,而绕组4中没有电流流过,那么电子转子的南极就会自然地按图中所示,指向定子磁场的北极。接着,我们再将绕组4的电流切断,按照图4(c)的方向给绕组1输送电流,注意:这时绕组1中的电流流向与图4(a)所示方向相反。于是定子的磁场北极就会指向下,从而导致转子旋转,其南极也指向下方。然后我们又切断绕组1中的电流,按照图2(d)所示方向给绕组2输送电流,于是定子磁场又会指向右侧,从而使得转子旋转,其南极也指向右侧。最后,我们再一次切断绕组2中的电流,并给绕组1输送如图2(a)所示的电流,这样,转子又会回到原来的位置。至此,我们对电机绕组完成了一个周期的电激励,电机转子旋转了一整圈。也就是说,电机的电频率等于它转动的机械频率。
如果我们用1秒钟顺利完成了图4所示的这4个步骤,那么电机的电频率就是1HZ。其转子旋转转了一周,因而其机械频率也是1HZ。总之,一个双相步进电机的电频率和机械频率之间的关系可以用下式表示:fe=fm*P/2①。其中,fe代表电机的电频率,fm代表其机械频率,P代表电机转子的等距磁极数。从图4中我们还可以看出,每一步操作都会事转子旋转90°,也就是说,一个双相步进电机每一步操作造成的旋转度数可由下式表示:1step=180°/P②。由等式②可知,一个双极电机每动作一次可以旋转180°/2=90°,这与我们在图②中看到的情形正好相符。此外,该等式还表明,电机的磁极数越多,步进精度就越高。常见的是磁极数在12和200个之间的双相步进电机,这些电机的步进精度在15°和0.9°之间。
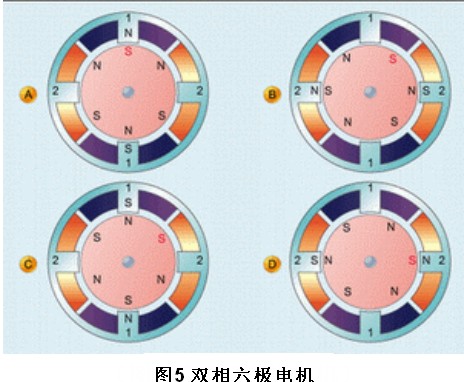
图5给出的是个双相六级步进电机的例子,其中包含3个永久磁铁,因而有6个磁极。其工作原理如下:
第一步:如图5(a)所示,我们给绕组1施加电压,在定子中产生一个北极指向其顶端的磁场,于是,转子的南极(图5(a)中红色的“S”一端)转向了该图的上方。
第二步:在图5(b)中,我们给绕组2施加电压,定子中产生一个北极指向其左侧的磁场。于是,转子的一个距离最近的南极转向了图的作坊,即转子顺时针转动了30°。
第三步:在图5(c)中,我们又向绕组1施加一个电压,在定子中产生一个北极指向下图下方的磁场,从而又使转子顺时针旋转30°到达图5(c)所示的位置。
第四步:在图5(d)中,我们给绕组2施加电压,在定子中产生一个北极指向定子右侧的磁场,再一次使转子顺时针旋转30°,到达图5(d)所示的位置。
第五步:我们再向绕组1施加电压,产生一个如图5(a)所示的北极指向定子上方的磁场,使得转子顺时针旋转30°,结束一个电周期。
我们可以看出,4步激励造成了120°的机械旋转。也就是说,该电机的电频率是机械频率的3倍,这一结果符合等式①。同时,我们从图5和等式②也可得出,该电机的转子每一步旋转30°。
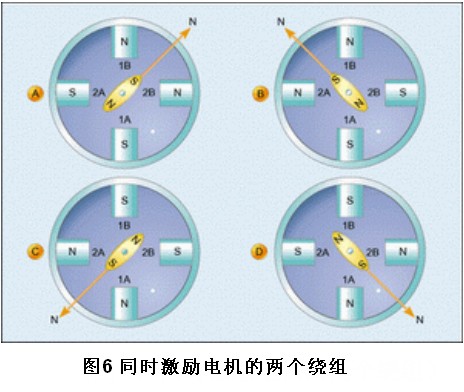
如果同时向两个绕组输送电流,还能增大电机的扭矩,如图6所示。这时,电机定子的磁场是两个绕组各自产生的磁场的矢量和,虽然这一磁场每一次动作仍然只使电机旋转90°,但因为我们同时激励两个电机绕组,所以此时磁场比单独激励一个绕组时更强。由于该磁场是两个垂直的矢量和,因此它等于单独每个场的2×1.414倍,从而电机对其负载施加的扭矩也成正比增大。
四、步进电机动态指标及术语
1、步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值同,四拍运行时应在5%之内,八拍运行时应在15%以内。
2、失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
3、失调角: 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
4、最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
5、最大空载的运行频率: 电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
6、运行矩频特性: 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。
其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电
流越大,电机输出力矩越大,即电机的频率特性越硬。如下图所示:
其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电
机。
整理人:卢阳
时间:2010-03-03
QQ:1341679830














 3834
3834











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









