







转至:http://blog.csdn.net/ghostyu/article/details/8094049
预备知识
在阅读本文最好先熟悉一种i2c设备的驱动程序,并且浏览一下i2c-core.c以及芯片提供商的提供的i2c总线驱动(i2c-davinci.c)。标题党请见谅!
其实i2c接口非常的简单,即使用51单片的gpio来模拟i2c,编写一个e2prom或者其他i2c接口的驱动程序,也不是什么难事,几百行代码就能搞定。
但是Linux的i2c驱动体系结构却有相当的复杂度,不管是叫linux i2c驱动还是单片机i2c驱动,其根本还是操作soc芯片内部的i2c模块(也叫i2c adapter)(读写i2c相关的寄存器)来产生start、stop还有ack信号而已。
linux设备驱动到底复杂在什么地方?
假设soc芯片dm368有两个i2c adapter(368内部真正只有一个i2c模块):i2c_adapter1,i2c_adapter1;然后外部有三个i2c接口的设备i2c_device1,i2c_device2,i2c_device3。
现在要求在裸机下写出他们的驱动函数。那么肯定要写出6个不同的驱动函数:
- i2c_adapter1_ReadWrite_i2c_device1();
- i2c_adapter1_ReadWrite_i2c_device2()
- i2c_adapter1_ReadWrite_i2c_device3()
- i2c_adapter2_ReadWrite_i2c_device1()
- i2c_adapter2_ReadWrite_i2c_device2()
- i2c_adapter2_ReadWrite_i2c_device3()
i2c_adapter1_ReadWrite_i2c_device1();
i2c_adapter1_ReadWrite_i2c_device2()
i2c_adapter1_ReadWrite_i2c_device3()
i2c_adapter2_ReadWrite_i2c_device1()
i2c_adapter2_ReadWrite_i2c_device2()
i2c_adapter2_ReadWrite_i2c_device3()如果采用adapter和device分离的思想来写这样的驱动会是怎样呢?

图1
这样分离之后,只需要m+n个驱动,而且Adapter和Device的几乎没有耦合性,增加一个Adapter或者device并不会影响其余的驱动。
这就是分离思想带来的好处。除此之外,linux虽然是C写的,但是大量使用了面向对象的编程方法(可以理解为分层的思想),
仅仅分离细想和分层思想的引入,就大大增加了linux设备驱动的复杂度。
linux驱动中 i2c驱动架构

图2
上图完整的描述了linux i2c驱动架构,虽然I2C硬件体系结构比较简单,但是i2c体系结构在linux中的实现却相当复杂。那么我们如何编写特定i2c接口器件(比如,ov2715,需要i2c来配置寄存器)的驱动程序?就是说上述架构中的那些部分需要我们完成,而哪些是linux内核已经完善的或者是芯片提供商(TI davinci平台已经做好的)已经提供的?
架构层次分类
第一层:提供i2c adapter的硬件驱动,探测、初始化i2c adapter(如申请i2c的io地址和中断号),驱动soc控制的i2c adapter在硬件上产生信号(start、stop、ack)以及处理i2c中断。覆盖图中的硬件实现层
第二层:提供i2c adapter的algorithm,用具体适配器的xxx_xferf()函数来填充i2c_algorithm的master_xfer函数指针,并把赋值后的i2c_algorithm再赋值给i2c_adapter的algo指针。覆盖图中的访问抽象层、i2c核心层
第三层:实现i2c设备驱动中的i2c_driver接口,用具体的i2c device设备的attach_adapter()、detach_adapter()方法赋值给i2c_driver的成员函数指针。实现设备device与总线(或者叫adapter)的挂接。覆盖图中的driver驱动层
第四层:实现i2c设备所对应的具体device的驱动,i2c_driver只是实现设备与总线的挂接,而挂接在总线上的设备则是千差万别的,eeprom和ov2715显然不是同一类的device,所以要实现具体设备device的write()、read()、ioctl()等方法,赋值给file_operations,然后注册字符设备(多数是字符设备)。覆盖图中的driver驱动层
第一层和第二层又叫i2c总线驱动(bus),第三第四属于i2c设备驱动(device driver)。在linux驱动架构中,几乎不需要驱动开发人员再添加bus,因为linux内核几乎集成所有总线bus,如usb、pci、i2c等等。并且总线bus中的【与特定硬件相关的代码】已由芯片提供商编写完成,例如TI davinci平台i2c总线bus与硬件相关的代码在内核目录/drivers/i2c/buses下的i2c-davinci.c源文件中;而三星的s3c-2440平台i2c总线bus为/drivers/i2c/buses/i2c-s3c2410.c
第三第四层又叫设备驱动层与特定device相干的就需要驱动工程师来实现了。
明确了方向后,再来具体分析。
具体分析
i2c_adapter与i2c_client的关系与i2c硬件体系中设配器与设备的关系一致,即i2c_client依附于i2c_adapter,由于一个适配器上可以连接多个i2c设备device,所以相应的,i2c_adapter也可以被多个i2c_client依附,在i2c_adapter中包含i2c_client的链表。同一类的i2c设备device对应一个驱动driver。driver与device的关系是一对多的关系。
现在,我们就来看一下这几个重要的结构体,分别是i2c_driver i2c_client i2c_adapter,也可以先忽略他们,待会回过头来看会更容易理解
1、i2c_driver
- struct i2c_driver {
- int id;
- unsigned int class;
- int (*attach_adapter)(struct i2c_adapter *);
- int (*detach_adapter)(struct i2c_adapter *);
- int (*detach_client)(struct i2c_client *);
- int (*command)(struct i2c_client *client,unsigned int cmd, void *arg);
- struct device_driver driver;
- struct list_head list;
- };
struct i2c_driver {
int id;
unsigned int class;
int (*attach_adapter)(struct i2c_adapter *);
int (*detach_adapter)(struct i2c_adapter *);
int (*detach_client)(struct i2c_client *);
int (*command)(struct i2c_client *client,unsigned int cmd, void *arg);
struct device_driver driver;
struct list_head list;
};2、i2c_client
- struct i2c_client {
- unsigned int flags; /* div., see below */
- unsigned short addr; /* chip address - NOTE: 7bit */
- /* addresses are stored in the */
- /* _LOWER_ 7 bits */
- struct i2c_adapter *adapter; /* the adapter we sit on */
- struct i2c_driver *driver; /* and our access routines */
- int usage_count; /* How many accesses currently */
- /* to the client */
- struct device dev; /* the device structure */
- struct list_head list;
- char name[I2C_NAME_SIZE];
- struct completion released;
- };
struct i2c_client {
unsigned int flags; /* div., see below */
unsigned short addr; /* chip address - NOTE: 7bit */
/* addresses are stored in the */
/* _LOWER_ 7 bits */
struct i2c_adapter *adapter; /* the adapter we sit on */
struct i2c_driver *driver; /* and our access routines */
int usage_count; /* How many accesses currently */
/* to the client */
struct device dev; /* the device structure */
struct list_head list;
char name[I2C_NAME_SIZE];
struct completion released;
};3、i2c_adapter
- struct i2c_adapter {
- struct module *owner;
- unsigned int id;
- unsigned int class;
- struct i2c_algorithm *algo;/* the algorithm to access the bus */
- void *algo_data;
- /* --- administration stuff. */
- int (*client_register)(struct i2c_client *);
- int (*client_unregister)(struct i2c_client *);
- /* data fields that are valid for all devices */
- struct mutex bus_lock;
- struct mutex clist_lock;
- int timeout;
- int retries;
- struct device dev; /* the adapter device */
- struct class_device class_dev; /* the class device */
- int nr;
- struct list_head clients;
- struct list_head list;
- char name[I2C_NAME_SIZE];
- struct completion dev_released;
- struct completion class_dev_released;
- };
struct i2c_adapter {
struct module *owner;
unsigned int id;
unsigned int class;
struct i2c_algorithm *algo;/* the algorithm to access the bus */
void *algo_data;
/* --- administration stuff. */
int (*client_register)(struct i2c_client *);
int (*client_unregister)(struct i2c_client *);
/* data fields that are valid for all devices */
struct mutex bus_lock;
struct mutex clist_lock;
int timeout;
int retries;
struct device dev; /* the adapter device */
struct class_device class_dev; /* the class device */
int nr;
struct list_head clients;
struct list_head list;
char name[I2C_NAME_SIZE];
struct completion dev_released;
struct completion class_dev_released;
};4、i2c_algorithm
- struct i2c_algorithm {
- int (*master_xfer)(struct i2c_adapter *adap,struct i2c_msg *msgs,
- int num);
- int (*slave_send)(struct i2c_adapter *,char*,int);
- int (*slave_recv)(struct i2c_adapter *,char*,int);
- u32 (*functionality) (struct i2c_adapter *);
- };
struct i2c_algorithm {
int (*master_xfer)(struct i2c_adapter *adap,struct i2c_msg *msgs,
int num);
int (*slave_send)(struct i2c_adapter *,char*,int);
int (*slave_recv)(struct i2c_adapter *,char*,int);
u32 (*functionality) (struct i2c_adapter *);
};i2c_adapter对应与物理上的一个适配器,而i2c_algorithm对应一套通信方法,一个i2c适配器需要i2c_algorithm中提供的(i2c_algorithm中的又是更下层与硬件相关的代码提供)通信函数来控制适配器上产生特定的访问周期。缺少i2c_algorithm的i2c_adapter什么也做不了,因此i2c_adapter中包含其使用i2c_algorithm的指针。
i2c_algorithm中的关键函数master_xfer()用于产生i2c访问周期需要的start stop ack信号,以i2c_msg(即i2c消息)为单位发送和接收通信数据。i2c_msg也非常关键,调用驱动中的发送接收函数需要填充该结构体
- /*
- * I2C Message - used for pure i2c transaction, also from /dev interface
- */
- struct i2c_msg {
- __u16 addr; /* slave address */
- __u16 flags;
- __u16 len; /* msg length */
- __u8 *buf; /* pointer to msg data */
- };
/*
* I2C Message - used for pure i2c transaction, also from /dev interface
*/
struct i2c_msg {
__u16 addr; /* slave address */
__u16 flags;
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};i2c_driver对应一套驱动方法,其主要函数是attach_adapter()和detach_client(),i2c_client对应真实的i2c物理设备device,每个i2c设备都需要一个i2c_client来描述,i2c_driver与i2c_client的关系是一对多。一个i2c_driver上可以支持多个同等类型的i2c_client.
【i2c_adapter和i2c_client】
i2c_adapter和i2c_client的关系与i2c硬件体系中适配器和设备的关系一致,即i2c_client依附于i2c_adapter,由于一个适配器上可以连接多个i2c设备,所以i2c_adapter中包含依附于它的i2c_client的链表。
从图1图2中都可以看出,linux内核对i2c架构抽象了一个叫核心层core的中间件,它分离了设备驱动device driver和硬件控制的实现细节(如操作i2c的寄存器),core层不但为上面的设备驱动提供封装后的内核注册函数,而且还为小面的硬件时间提供注册接口(也就是i2c总线注册接口),可以说core层起到了承上启下的作用。
我们先看一下i2c-core为外部提供的核心函数(选取部分),i2c-core对应的源文件为i2c-core.c,位于内核目录/driver/i2c/i2c-core.c
- EXPORT_SYMBOL(i2c_add_adapter);
- EXPORT_SYMBOL(i2c_del_adapter);
- EXPORT_SYMBOL(i2c_del_driver);
- EXPORT_SYMBOL(i2c_attach_client);
- EXPORT_SYMBOL(i2c_detach_client);
- EXPORT_SYMBOL(i2c_transfer);
EXPORT_SYMBOL(i2c_add_adapter);
EXPORT_SYMBOL(i2c_del_adapter);
EXPORT_SYMBOL(i2c_del_driver);
EXPORT_SYMBOL(i2c_attach_client);
EXPORT_SYMBOL(i2c_detach_client);
EXPORT_SYMBOL(i2c_transfer);i2c_transfer()函数,i2c_transfer()函数本身并不具备驱动适配器物理硬件完成消息交互的能力,它只是寻找到i2c_adapter对应的i2c_algorithm,并使用i2c_algorithm的master_xfer()函数真正的驱动硬件流程,代码清单如下,不重要的已删除。
- int i2c_transfer(struct i2c_adapter * adap, struct i2c_msg *msgs, int num)
- {
- int ret;
- if (adap->algo->master_xfer) {//如果master_xfer函数存在,则调用,否则返回错误
- ret = adap->algo->master_xfer(adap,msgs,num);//这个函数在硬件相关的代码中给algorithm赋值
- return ret;
- } else {
- return -ENOSYS;
- }
- }
int i2c_transfer(struct i2c_adapter * adap, struct i2c_msg *msgs, int num)
{
int ret;
if (adap->algo->master_xfer) {//如果master_xfer函数存在,则调用,否则返回错误
ret = adap->algo->master_xfer(adap,msgs,num);//这个函数在硬件相关的代码中给algorithm赋值
return ret;
} else {
return -ENOSYS;
}
}- int i2c_attach_client(struct i2c_client *client)
- {
- ...
- device_register(&client->dev);
- device_create_file(&client->dev, &dev_attr_client_name);
- ...
- return 0;
- }
int i2c_attach_client(struct i2c_client *client)
{
...
device_register(&client->dev);
device_create_file(&client->dev, &dev_attr_client_name);
...
return 0;
}- int i2c_detach_client(struct i2c_client *client)
- {
- ...
- device_remove_file(&client->dev, &dev_attr_client_name);
- device_unregister(&client->dev);
- ...
- return res;
- }
int i2c_detach_client(struct i2c_client *client)
{
...
device_remove_file(&client->dev, &dev_attr_client_name);
device_unregister(&client->dev);
...
return res;
}- /* -----
- * i2c_add_adapter is called from within the algorithm layer,
- * when a new hw adapter registers. A new device is register to be
- * available for clients.
- */
- int i2c_add_adapter(struct i2c_adapter *adap)
- {
- ...
- device_register(&adap->dev);
- device_create_file(&adap->dev, &dev_attr_name);
- ...
- /* inform drivers of new adapters */
- list_for_each(item,&drivers) {
- driver = list_entry(item, struct i2c_driver, list);
- if (driver->attach_adapter)
- /* We ignore the return code; if it fails, too bad */
- driver->attach_adapter(adap);
- }
- ...
- }
/* -----
* i2c_add_adapter is called from within the algorithm layer,
* when a new hw adapter registers. A new device is register to be
* available for clients.
*/
int i2c_add_adapter(struct i2c_adapter *adap)
{
...
device_register(&adap->dev);
device_create_file(&adap->dev, &dev_attr_name);
...
/* inform drivers of new adapters */
list_for_each(item,&drivers) {
driver = list_entry(item, struct i2c_driver, list);
if (driver->attach_adapter)
/* We ignore the return code; if it fails, too bad */
driver->attach_adapter(adap);
}
...
}- int i2c_del_adapter(struct i2c_adapter *adap)
- {
- ...
- list_for_each(item,&drivers) {
- driver = list_entry(item, struct i2c_driver, list);
- if (driver->detach_adapter)
- if ((res = driver->detach_adapter(adap))) {
- }
- }
- ...
- list_for_each_safe(item, _n, &adap->clients) {
- client = list_entry(item, struct i2c_client, list);
- if ((res=client->driver->detach_client(client))) {
- }
- }
- ...
- device_remove_file(&adap->dev, &dev_attr_name);
- device_unregister(&adap->dev);
- }
int i2c_del_adapter(struct i2c_adapter *adap)
{
...
list_for_each(item,&drivers) {
driver = list_entry(item, struct i2c_driver, list);
if (driver->detach_adapter)
if ((res = driver->detach_adapter(adap))) {
}
}
...
list_for_each_safe(item, _n, &adap->clients) {
client = list_entry(item, struct i2c_client, list);
if ((res=client->driver->detach_client(client))) {
}
}
...
device_remove_file(&adap->dev, &dev_attr_name);
device_unregister(&adap->dev);
}- static struct platform_driver davinci_i2c_driver = {
- .probe = davinci_i2c_probe,
- .remove = davinci_i2c_remove,
- .driver = {
- .name = "i2c_davinci",
- .owner = THIS_MODULE,
- },
- };
- /* I2C may be needed to bring up other drivers */
- static int __init davinci_i2c_init_driver(void)
- {
- return platform_driver_register(&davinci_i2c_driver);
- }
- subsys_initcall(davinci_i2c_init_driver);
- static void __exit davinci_i2c_exit_driver(void)
- {
- platform_driver_unregister(&davinci_i2c_driver);
- }
- module_exit(davinci_i2c_exit_driver);
static struct platform_driver davinci_i2c_driver = {
.probe = davinci_i2c_probe,
.remove = davinci_i2c_remove,
.driver = {
.name = "i2c_davinci",
.owner = THIS_MODULE,
},
};
/* I2C may be needed to bring up other drivers */
static int __init davinci_i2c_init_driver(void)
{
return platform_driver_register(&davinci_i2c_driver);
}
subsys_initcall(davinci_i2c_init_driver);
static void __exit davinci_i2c_exit_driver(void)
{
platform_driver_unregister(&davinci_i2c_driver);
}
module_exit(davinci_i2c_exit_driver);- static struct i2c_algorithm i2c_davinci_algo = {
- .master_xfer = i2c_davinci_xfer,
- .functionality = i2c_davinci_func,
- };
static struct i2c_algorithm i2c_davinci_algo = {
.master_xfer = i2c_davinci_xfer,
.functionality = i2c_davinci_func,
};- adap->algo = &i2c_davinci_algo;
adap->algo = &i2c_davinci_algo;梳理图
有时候代码比任何文字描述都来得直接,但是过多的代码展示反而让人觉得枯燥。这个时候,需要一幅图来梳理一下上面的内容,请看图3。

图3
好了,上面这些代码的展示是告诉我们,linux内核和芯片提供商为我们的的驱动程序提供了 i2c驱动的框架,以及框架底层与硬件相关的代码的实现。剩下的就是针对挂载在i2c两线上的i2c设备了device,如at24c02,例如ov2715,而编写的具体设备驱动了,这里的设备就是硬件接口外挂载的设备,而非硬件接口本身(soc硬件接口本身的驱动可以理解为总线驱动)。
在理解了i2c驱动架构后,我们接下来再作两方面的分析工作:一是具体的i2c设备ov2715驱动源码分析,二是davinci平台的i2c总线驱动源码。
ov2715设备i2c驱动源码分析
ov2715为200万的CMOS Sensor,芯片的寄存器控制通过i2c接口完成,i2c设备地址为0x6c,寄存器地址为16位两个字节,寄存器值为8位一个字节,可以理解为一般的字符设备。
该驱动程序并非只能用于ov2715,因此源码中存在支持多个设备地址的机制。
该字符设备的用到的结构体有两个,如下
- typedef struct {
- int devAddr;
- struct i2c_client client; //!< Data structure containing general access routines.
- struct i2c_driver driver; //!< Data structure containing information specific to each client.
- char name[20];
- int nameSize;
- int users;
- } I2C_Obj;
typedef struct {
int devAddr;
struct i2c_client client; //!< Data structure containing general access routines.
struct i2c_driver driver; //!< Data structure containing information specific to each client.
char name[20];
int nameSize;
int users;
} I2C_Obj;
- #define I2C_DEV_MAX_ADDR (0xFF)
- #define I2C_TRANSFER_BUF_SIZE_MAX (256)
- typedef struct {
- struct cdev cdev; /* Char device structure */
- int major;
- struct semaphore semLock;
- I2C_Obj *pObj[I2C_DEV_MAX_ADDR];
- uint8_t reg[I2C_TRANSFER_BUF_SIZE_MAX];
- uint16_t reg16[I2C_TRANSFER_BUF_SIZE_MAX];
- uint8_t buffer[I2C_TRANSFER_BUF_SIZE_MAX*4];
- } I2C_Dev;
#define I2C_DEV_MAX_ADDR (0xFF)
#define I2C_TRANSFER_BUF_SIZE_MAX (256)
typedef struct {
struct cdev cdev; /* Char device structure */
int major;
struct semaphore semLock;
I2C_Obj *pObj[I2C_DEV_MAX_ADDR];
uint8_t reg[I2C_TRANSFER_BUF_SIZE_MAX];
uint16_t reg16[I2C_TRANSFER_BUF_SIZE_MAX];
uint8_t buffer[I2C_TRANSFER_BUF_SIZE_MAX*4];
} I2C_Dev;一个I2C_Obj描述一个设备,devAddr保存该设备的地址,I2C_Obj内嵌到结构体I2C_Dev,I2C_Dev管理该驱动所支持的所有设备,尽管支持多个设备,但i2c适配器只有一个,因此需要一个信号量semLock来保护该共享资源,同时只能向一个设备读写数据。成员变量cdev是我们所熟知的,每个字符设备驱动中几乎总会有一个结构体包含它,major用于保存该驱动的主设备编号,reg数组为寄存器地址为8位的寄存器地址缓冲区,reg16为寄存器地址为16的寄存器地址缓冲区。同时可以读写多个寄存器地址的值。buffer为读写的寄存器值 使用I2C_Dev构建一个全局变量gI2C_dev,在驱动的多个地方均需要它。
下面先从字符设备的基本框架入手,然后深入该驱动的细节部分。
首先是该字符设备的初始化和退出函数
- int I2C_devInit(void)
- {
- int result, i;
- dev_t dev = 0;
- result = alloc_chrdev_region(&dev, 0, 1, I2C_DRV_NAME);//分配字符设备空间
- for(i=0; i<I2C_DEV_MAX_ADDR; i++)
- {
- gI2C_dev.pObj[i]=NULL;
- }
- gI2C_dev.major = MAJOR(dev);//保存设备主编号
- sema_init(&gI2C_dev.semLock, 1);//信号量初始化
- cdev_init(&gI2C_dev.cdev, &gI2C_devFileOps);//使用gI2C_devFileOps初始化该字符设备,gI2C_devFileOps见下文
- gI2C_dev.cdev.owner = THIS_MODULE;//常规赋值
- gI2C_dev.cdev.ops = &gI2C_devFileOps;//常规赋值 result = cdev_add(&gI2C_dev.cdev, dev, 1);//添加设备到字符设备中 return result;}void I2C_devExit(void){ dev_t devno = MKDEV(gI2C_dev.major, 0); cdev_del(&gI2C_dev.cdev);//从字符设备中删除该设备 unregister_chrdev_region(devno, 1);//回收空间}
- gI2c_devFileOps全局变量,驱动初始化会用到该结构体变量
- struct file_operations gI2C_devFileOps = {
- .owner = THIS_MODULE,
- .open = I2C_devOpen,
- .release = I2C_devRelease,
- .ioctl = I2C_devIoctl,
- };
int I2C_devInit(void)
{
int result, i;
dev_t dev = 0;
result = alloc_chrdev_region(&dev, 0, 1, I2C_DRV_NAME);//分配字符设备空间
for(i=0; i<I2C_DEV_MAX_ADDR; i++)
{
gI2C_dev.pObj[i]=NULL;
}
gI2C_dev.major = MAJOR(dev);//保存设备主编号
sema_init(&gI2C_dev.semLock, 1);//信号量初始化
cdev_init(&gI2C_dev.cdev, &gI2C_devFileOps);//使用gI2C_devFileOps初始化该字符设备,gI2C_devFileOps见下文
gI2C_dev.cdev.owner = THIS_MODULE;//常规赋值
gI2C_dev.cdev.ops = &gI2C_devFileOps;//常规赋值 result = cdev_add(&gI2C_dev.cdev, dev, 1);//添加设备到字符设备中 return result;}void I2C_devExit(void){ dev_t devno = MKDEV(gI2C_dev.major, 0); cdev_del(&gI2C_dev.cdev);//从字符设备中删除该设备 unregister_chrdev_region(devno, 1);//回收空间}
gI2c_devFileOps全局变量,驱动初始化会用到该结构体变量
struct file_operations gI2C_devFileOps = {
.owner = THIS_MODULE,
.open = I2C_devOpen,
.release = I2C_devRelease,
.ioctl = I2C_devIoctl,
};在I2C_devOpen和I2C_devOpen中并没有做实际的工作,重要的工作均在I2C_devIoctl这个ioctl中完成。I2C_devIoctl代码展示(将影响结构条理的代码去掉,稍后在做详细分析)
- int I2C_devIoctl(struct inode *inode, struct file *filp, unsigned int cmd, unsigned long arg)
- {
- I2C_Obj *pObj;
- int status=0;
- I2C_TransferPrm transferPrm;
- pObj = (I2C_Obj *)filp->private_data;
- if(!I2C_IOCTL_CMD_IS_VALID(cmd))
- return -1;
- cmd = I2C_IOCTL_CMD_GET(cmd);//cmd命令转换,防止混淆,具体原因参见上一篇文章:ioctl中的cmd
- down_interruptible(&gI2C_dev.semLock); //信号量down
- switch(cmd)
- {
- case I2C_CMD_SET_DEV_ADDR://命令1,设置设备地址
- filp->private_data = I2C_create(arg);
- case I2C_CMD_WRITE: //命令2,写寄存器值
- status = copy_from_user(&transferPrm, (void *)arg, sizeof(transferPrm));
- ...
- break;
- case I2C_CMD_READ: //命令3,读寄存器值
- status = copy_from_user(&transferPrm, (void *)arg, sizeof(transferPrm));
- ...
- break;
- default:
- status = -1;
- break;
- }
- up(&gI2C_dev.semLock); //信号量up
- return status;
- }
int I2C_devIoctl(struct inode *inode, struct file *filp, unsigned int cmd, unsigned long arg)
{
I2C_Obj *pObj;
int status=0;
I2C_TransferPrm transferPrm;
pObj = (I2C_Obj *)filp->private_data;
if(!I2C_IOCTL_CMD_IS_VALID(cmd))
return -1;
cmd = I2C_IOCTL_CMD_GET(cmd);//cmd命令转换,防止混淆,具体原因参见上一篇文章:ioctl中的cmd
down_interruptible(&gI2C_dev.semLock); //信号量down
switch(cmd)
{
case I2C_CMD_SET_DEV_ADDR://命令1,设置设备地址
filp->private_data = I2C_create(arg);
case I2C_CMD_WRITE: //命令2,写寄存器值
status = copy_from_user(&transferPrm, (void *)arg, sizeof(transferPrm));
...
break;
case I2C_CMD_READ: //命令3,读寄存器值
status = copy_from_user(&transferPrm, (void *)arg, sizeof(transferPrm));
...
break;
default:
status = -1;
break;
}
up(&gI2C_dev.semLock); //信号量up
return status;
}- void *I2C_create(int devAddr) {
- int ret;
- struct i2c_driver *driver;
- struct i2c_client *client = client;
- I2C_Obj *pObj;
- devAddr >>= 1;
- if(devAddr>I2C_DEV_MAX_ADDR) //变量合法性判断
- return NULL;
- if(gI2C_dev.pObj[devAddr]!=NULL) { //变量合法性判断,如果该地址的设备已经创建,则调过,防止上层错误调用
- // already allocated, increment user count, and return the allocated handle
- gI2C_dev.pObj[devAddr]->users++;
- return gI2C_dev.pObj[devAddr];
- }
- pObj = (void*)kmalloc( sizeof(I2C_Obj), GFP_KERNEL); //为pObj分配空间
- gI2C_dev.pObj[devAddr] = pObj; //将分配的空间地址保存在全局变量里
- memset(pObj, 0, sizeof(I2C_Obj));
- pObj->client.adapter = NULL;
- pObj->users++; //用户基数,初始化为0,当前设为1
- pObj->devAddr = devAddr; //保存设备地址
- gI2C_curAddr = pObj->devAddr; //gI2C_curAddr为全局的整型变量,用于保存当前的设备地址
- driver = &pObj->driver; //将成员变量driver单独抽取出来,因为线面要使用driver来初始化驱动
- pObj->nameSize=0;//i2c设备名称,注意,这里不是在/dev下面的设备节点名
- pObj->name[pObj->nameSize++] = 'I';
- pObj->name[pObj->nameSize++] = '2';
- pObj->name[pObj->nameSize++] = 'C';
- pObj->name[pObj->nameSize++] = '_';
- pObj->name[pObj->nameSize++] = 'A' + ((pObj->devAddr >> 0) & 0xF);
- pObj->name[pObj->nameSize++] = 'B' + ((pObj->devAddr >> 4) & 0xF);
- pObj->name[pObj->nameSize++] = 0;
- driver->driver.name = pObj->name; //保存刚才设置的name
- driver->id = I2C_DRIVERID_MISC;
- driver->attach_adapter = I2C_attachAdapter; //这个很重要,将驱动连接到i2c适配器上,在后面分析
- driver->detach_client = I2C_detachClient; //这个很重,在后面分析
- if((ret = i2c_add_driver(driver))) //使用i2c-core(i2c_register_driver函数)的接口,注册该驱动,i2c_add_driver实质调用了driver_register()
- {
- printk( KERN_ERR "I2C: ERROR: Driver registration failed (address=%x), module not inserted.\n", pObj->devAddr);
- }
- if(ret<0) {
- gI2C_dev.pObj[pObj->devAddr] = NULL;
- kfree(pObj);
- return NULL;
- }
- return pObj;
- }
void *I2C_create(int devAddr) {
int ret;
struct i2c_driver *driver;
struct i2c_client *client = client;
I2C_Obj *pObj;
devAddr >>= 1;
if(devAddr>I2C_DEV_MAX_ADDR) //变量合法性判断
return NULL;
if(gI2C_dev.pObj[devAddr]!=NULL) { //变量合法性判断,如果该地址的设备已经创建,则调过,防止上层错误调用
// already allocated, increment user count, and return the allocated handle
gI2C_dev.pObj[devAddr]->users++;
return gI2C_dev.pObj[devAddr];
}
pObj = (void*)kmalloc( sizeof(I2C_Obj), GFP_KERNEL); //为pObj分配空间
gI2C_dev.pObj[devAddr] = pObj; //将分配的空间地址保存在全局变量里
memset(pObj, 0, sizeof(I2C_Obj));
pObj->client.adapter = NULL;
pObj->users++; //用户基数,初始化为0,当前设为1
pObj->devAddr = devAddr; //保存设备地址
gI2C_curAddr = pObj->devAddr; //gI2C_curAddr为全局的整型变量,用于保存当前的设备地址
driver = &pObj->driver; //将成员变量driver单独抽取出来,因为线面要使用driver来初始化驱动
pObj->nameSize=0;//i2c设备名称,注意,这里不是在/dev下面的设备节点名
pObj->name[pObj->nameSize++] = 'I';
pObj->name[pObj->nameSize++] = '2';
pObj->name[pObj->nameSize++] = 'C';
pObj->name[pObj->nameSize++] = '_';
pObj->name[pObj->nameSize++] = 'A' + ((pObj->devAddr >> 0) & 0xF);
pObj->name[pObj->nameSize++] = 'B' + ((pObj->devAddr >> 4) & 0xF);
pObj->name[pObj->nameSize++] = 0;
driver->driver.name = pObj->name; //保存刚才设置的name
driver->id = I2C_DRIVERID_MISC;
driver->attach_adapter = I2C_attachAdapter; //这个很重要,将驱动连接到i2c适配器上,在后面分析
driver->detach_client = I2C_detachClient; //这个很重,在后面分析
if((ret = i2c_add_driver(driver))) //使用i2c-core(i2c_register_driver函数)的接口,注册该驱动,i2c_add_driver实质调用了driver_register()
{
printk( KERN_ERR "I2C: ERROR: Driver registration failed (address=%x), module not inserted.\n", pObj->devAddr);
}
if(ret<0) {
gI2C_dev.pObj[pObj->devAddr] = NULL;
kfree(pObj);
return NULL;
}
return pObj;
}其他两个命令是I2C_CMD_WRITE和I2C_CMD_READ,这个比较简单,只需设置寄存器地址的大小以及寄存器值的大小,然后通过i2c-core 提供的i2c_transfer()函数发送即可。例如I2C_wirte()
- int I2C_write(I2C_Obj *pObj, uint8_t *reg, uint8_t *buffer, uint8_t count, uint8_t dataSize)
- {
- uint8_t i;
- int err;
- struct i2c_client *client;
- struct i2c_msg msg[1];
- unsigned char data[8];
- if(pObj==NULL)
- return -ENODEV;
- client = &pObj->client;//得到client信息
- if(!client->adapter)
- return -ENODEV;
- if(dataSize<=0||dataSize>4)
- return -1;
- for(i=0; i<count; i++) {
- msg->addr = client->addr;//设置要写的i2c设备地址
- msg->flags= 0;//一直为0
- msg->buf = data;//date为准备i2c通信的缓冲区,这个缓冲区除了不包含设备地址外,要包括要目标寄存器地址,和要写入该寄存器的值
- data[0] = reg[i];//寄存器地址赋值
- if(dataSize==1) {//寄存器值长度为1
- data[1] = buffer[i];//寄存器值赋值
- msg->len = 2; //设置data长度为2
- } else if(dataSize==2) {//寄存器值长度为2
- data[1] = buffer[2*i+1];
- data[2] = buffer[2*i];
- msg->len = 3;
- }
- err = i2c_transfer(client->adapter, msg, 1);//调用i2c-core中的i2c_transfer发送i2c数据
- if( err < 0 )
- return err;
- }
- return 0;
- }
int I2C_write(I2C_Obj *pObj, uint8_t *reg, uint8_t *buffer, uint8_t count, uint8_t dataSize)
{
uint8_t i;
int err;
struct i2c_client *client;
struct i2c_msg msg[1];
unsigned char data[8];
if(pObj==NULL)
return -ENODEV;
client = &pObj->client;//得到client信息
if(!client->adapter)
return -ENODEV;
if(dataSize<=0||dataSize>4)
return -1;
for(i=0; i<count; i++) {
msg->addr = client->addr;//设置要写的i2c设备地址
msg->flags= 0;//一直为0
msg->buf = data;//date为准备i2c通信的缓冲区,这个缓冲区除了不包含设备地址外,要包括要目标寄存器地址,和要写入该寄存器的值
data[0] = reg[i];//寄存器地址赋值
if(dataSize==1) {//寄存器值长度为1
data[1] = buffer[i];//寄存器值赋值
msg->len = 2; //设置data长度为2
} else if(dataSize==2) {//寄存器值长度为2
data[1] = buffer[2*i+1];
data[2] = buffer[2*i];
msg->len = 3;
}
err = i2c_transfer(client->adapter, msg, 1);//调用i2c-core中的i2c_transfer发送i2c数据
if( err < 0 )
return err;
}
return 0;
}现在,我们重点分析上一段代码void *I2C_create(int devAddr)函数中的i2c_driver结构体部分的代码,下面的代码是从上面I2C_create抽取出来的
- driver->driver.name = pObj->name;
- driver->id = I2C_DRIVERID_MISC;
- driver->attach_adapter = I2C_attachAdapter;
- driver->detach_client = I2C_detachClient;
driver->driver.name = pObj->name;
driver->id = I2C_DRIVERID_MISC;
driver->attach_adapter = I2C_attachAdapter;
driver->detach_client = I2C_detachClient;- /* Notifies the driver that a new bus has appeared. This routine
- * can be used by the driver to test if the bus meets its conditions
- * & seek for the presence of the chip(s) it supports. If found, it
- * registers the client(s) that are on the bus to the i2c admin. via
- * i2c_attach_client.
- */
/* Notifies the driver that a new bus has appeared. This routine
* can be used by the driver to test if the bus meets its conditions
* & seek for the presence of the chip(s) it supports. If found, it
* registers the client(s) that are on the bus to the i2c admin. via
* i2c_attach_client.
*/- int I2C_attachAdapter(struct i2c_adapter *adapter)
- {
- return I2C_detectClient(adapter, gI2C_curAddr);
- }
- int I2C_detectClient(struct i2c_adapter *adapter, int address)
- {
- I2C_Obj *pObj;
- struct i2c_client *client;
- int err = 0;
- if(address > I2C_DEV_MAX_ADDR) {
- printk( KERN_ERR "I2C: ERROR: Invalid device address %x\n", address);
- return -1;
- }
- pObj = gI2C_dev.pObj[address];
- if(pObj==NULL) {
- printk( KERN_ERR "I2C: ERROR: Object not found for address %x\n", address);
- return -1;
- }
- client = &pObj->client;
- if(client->adapter)
- return -EBUSY; /* our client is already attached */
- memset(client, 0x00, sizeof(struct i2c_client));
- client->addr = pObj->devAddr;
- client->adapter = adapter;
- client->driver = &pObj->driver;
- if((err = i2c_attach_client(client)))
- {
- printk( KERN_ERR "I2C: ERROR: Couldn't attach %s (address=%x)\n", pObj->name, pObj->devAddr);
- client->adapter = NULL;
- return err;
- }
- return 0;
- }
int I2C_attachAdapter(struct i2c_adapter *adapter)
{
return I2C_detectClient(adapter, gI2C_curAddr);
}
int I2C_detectClient(struct i2c_adapter *adapter, int address)
{
I2C_Obj *pObj;
struct i2c_client *client;
int err = 0;
if(address > I2C_DEV_MAX_ADDR) {
printk( KERN_ERR "I2C: ERROR: Invalid device address %x\n", address);
return -1;
}
pObj = gI2C_dev.pObj[address];
if(pObj==NULL) {
printk( KERN_ERR "I2C: ERROR: Object not found for address %x\n", address);
return -1;
}
client = &pObj->client;
if(client->adapter)
return -EBUSY; /* our client is already attached */
memset(client, 0x00, sizeof(struct i2c_client));
client->addr = pObj->devAddr;
client->adapter = adapter;
client->driver = &pObj->driver;
if((err = i2c_attach_client(client)))
{
printk( KERN_ERR "I2C: ERROR: Couldn't attach %s (address=%x)\n", pObj->name, pObj->devAddr);
client->adapter = NULL;
return err;
}
return 0;
}
当内核驱动准备删除该驱动时会自动调用i2c_driver的成员函数:detech_client,因此我们需要实现删除client设备的函数然后赋值给改函数指针,detech_client的说明如下:
- /* tells the driver that a client is about to be deleted & gives it
- * the chance to remove its private data. Also, if the client struct
- * has been dynamically allocated by the driver in the function above,
- * it must be freed here.
- */
/* tells the driver that a client is about to be deleted & gives it
* the chance to remove its private data. Also, if the client struct
* has been dynamically allocated by the driver in the function above,
* it must be freed here.
*/- int I2C_detachClient(struct i2c_client *client)
- {
- int err;
- if(!client->adapter)
- return -ENODEV; /* our client isn't attached */
- if((err = i2c_detach_client(client))) {
- printk( KERN_ERR "Client deregistration failed (address=%x), client not detached.\n", client->addr);
- return err;
- }
- client->adapter = NULL;
- return 0;
- }
int I2C_detachClient(struct i2c_client *client)
{
int err;
if(!client->adapter)
return -ENODEV; /* our client isn't attached */
if((err = i2c_detach_client(client))) {
printk( KERN_ERR "Client deregistration failed (address=%x), client not detached.\n", client->addr);
return err;
}
client->adapter = NULL;
return 0;
}ov2715设备的i2c驱动源码的分析就到这里,至于平台相关的i2c总线驱动分析就放到下一篇文章里分析,因为这部分多数情况下并不需要我们亲自去实现。但是对于理解i2c驱动架构来说,还是有很大帮助的。
其他文章:
Linux 设备驱动篇之I2c设备驱动
fulinux
一、I2C驱动体系
虽然I2C硬件体系结构和协议都很容易理解,但是Linux I2C驱动体系结构却有相当的复杂度,它主要由3部分组成,即I2C设备驱动、I2C总线驱动和I2C核心。
1.I2C核心
I2C核心是I2c总线和I2c设备驱动的中间枢纽,它以通用的、与平台无关的接口实现了I2C中设备与适配器的沟通,提供了I2C总线驱动和设备驱动的注册、注销方法,I2C通信方法(即“algorithm”)上层的、与具体适配器无关的代码以及探测设备、检测设备的地址的上层代码等。I2c总线驱动填充I2c_adapter和I2c_algorithm结构体,I2c设备驱动填充I2c_driver和i2c_client结构体并实现其本身所对应设备类型的驱动。
2.I2C总线驱动
I2C总线驱动是对I2C硬件体系结构中适配器的实现,适配器可由CPU控制,甚至可以直接集成在CPU内部。
I2C总线驱动主要包含了I2C适配器数据结构i2c_adapter、I2C适配器的algorithm数据结构i2c_algorithm和控制I2C适配器产生通信信号的函数。
经由I2C总线驱动的代码,我们可以控制I2C适配器以主控制方式产生开始、停止位、读写周期,以及以从设备方式读写、产生ACK等。
3.I2C设备驱动
I2C设备驱动(也称为客户端驱动)是对I2C硬件体系结构中设备端的实现,设备一般挂接在受CPU控制的I2C适配器上,通过I2C适配器与CPU交换数据。
I2C设备驱动主要包含了数据结构体i2c_driver和i2c_client,我们需要具体设备实现其中的成员函数。
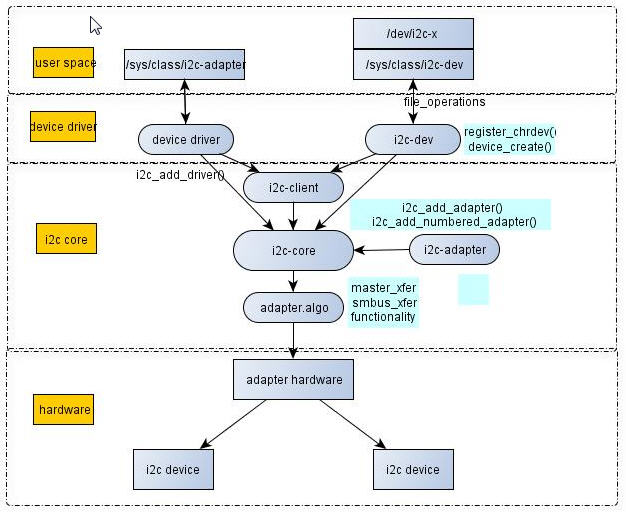
图1 I2C驱动体系结构图1
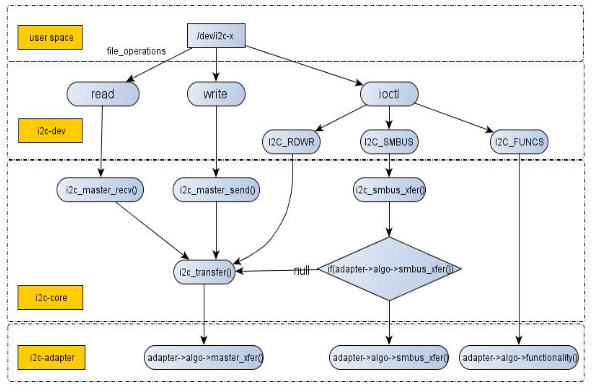
图2 I2C驱动体系结构图2
另外,系统中i2c-dev.c文件定义的主设备号为89的设备可以方便地给应用程序提供读写I2c设备寄存器的能力,使得工程师大多数时候并不需要为具体的I2c设备驱动定义文件操作接口。
如何理解adapter和client呢?它在s3c2440中对应的是什么?Adapter和client都是linux驱动软件抽象出来的东西,Linux I2C框架搞那么复杂是为了通用性及为了符合Linux内核驱动模式而制定的。简单的说,你的开发板上有几个I2C接口,就有几个adapter , 也就是有几条I2C bus , I2C client对应的就是你的外围I2C 设备,有几个就有几个client , 把这些设备插入开发板, 对应其中的一条bus, 那么相应的就对应了其中的一个adapter , 接下来的就是I2c核心部分使client与 adapter匹配成对。
在linux内核中,所有的I2C设备都在sysfs文件系统中显示,存在于/sys/bus/i2c/目录下,适配器地址和芯片地址的形式列出,例如:
1. [fulinux@ubuntu linux-3.0]$ tree /sys/bus/i2c/
2. /sys/bus/i2c/
3. |-- devices
4. | |-- i2c-0 -> ../../../devices/pci0000:00/0000:00:02.0/i2c-0
5. | |-- i2c-1 -> ../../../devices/pci0000:00/0000:00:02.0/i2c-1
6. | |-- i2c-2 -> ../../../devices/pci0000:00/0000:00:02.0/i2c-2
7. | |-- i2c-3 -> ../../../devices/pci0000:00/0000:00:02.0/i2c-3
8. | |-- i2c-4 -> ../../../devices/pci0000:00/0000:00:02.0/i2c-4
9. | |-- i2c-5 -> ../../../devices/pci0000:00/0000:00:02.0/i2c-5
10. | |-- i2c-6 -> ../../../devices/pci0000:00/0000:00:02.0/drm/card0/card0-DP-1/i2c-6
11. | `-- i2c-7 -> ../../../devices/pci0000:00/0000:00:02.0/drm/card0/card0-DP-2/i2c-7
12. |-- drivers
13. | |-- 88PM860x
14. | | |-- bind
15. | | |-- uevent
16. | | `-- unbind
17. | |-- aat2870
18. | | |-- bind
19. | | |-- uevent
20. | | `-- unbind
21. | |-- ab3100
22. | | |-- bind
23. | | |-- uevent
24. | | `-- unbind
25. | |-- adp5520
下面我以s3c2440开发板及其之上的EEPROM芯片AT24C02和linux-3.0内核平台讲解I2c的三个部分。
********************************************************************************************
转载声明:希望大家能转载此文谢谢 原文链接
********************************************************************************************
4.s3c2440和at24c02硬件特性
请看s3c2440.pdf
芯片AT24C02的电气特性:
• Low-voltage and Standard-voltage Operation
– 2.7 (VCC= 2.7V to 5.5V)
– 1.8 (VCC= 1.8V to 5.5V)
• Internally Organized 128 x 8 (1K), 256 x 8 (2K), 512 x 8 (4K),
1024 x 8 (8K) or 2048 x 8 (16K)
• Two-wire Serial Interface
• Schmitt Trigger, Filtered Inputs for Noise Suppression
• Bidirectional Data Transfer Protocol
• 100 kHz (1.8V) and 400 kHz (2.7V, 5V) Compatibility
• Write Protect Pin for Hardware Data Protection
• 8-byte Page (1K, 2K), 16-byte Page (4K, 8K, 16K) Write Modes
• Partial Page Writes Allowed
• Self-timed Write Cycle (5 ms max)
• High-reliability
– Endurance: 1 Million Write Cycles
– Data Retention: 100 Years
• Automotive Grade and Lead-free/Halogen-free Devices Available
• 8-lead PDIP, 8-lead JEDEC SOIC, 8-lead MAP, 5-lead SOT23,
8-lead TSSOP and 8-ball dBGA2 Packages
• Die Sales: Wafer Form, Waffle Pack and Bumped Wafers
主要是看AT24C02.pdf
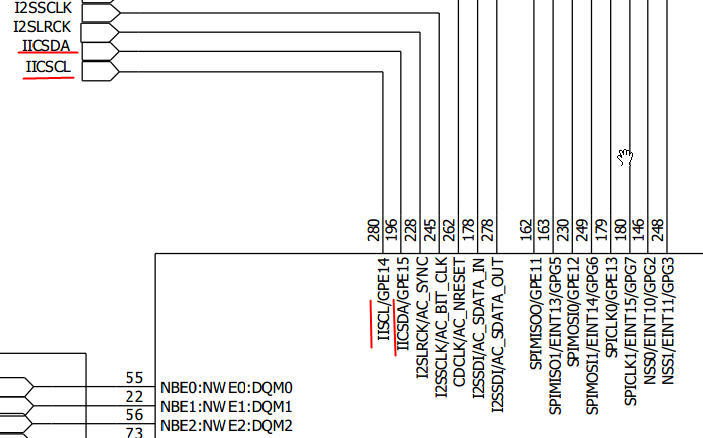
图3 S3c244开发板核心板电路图
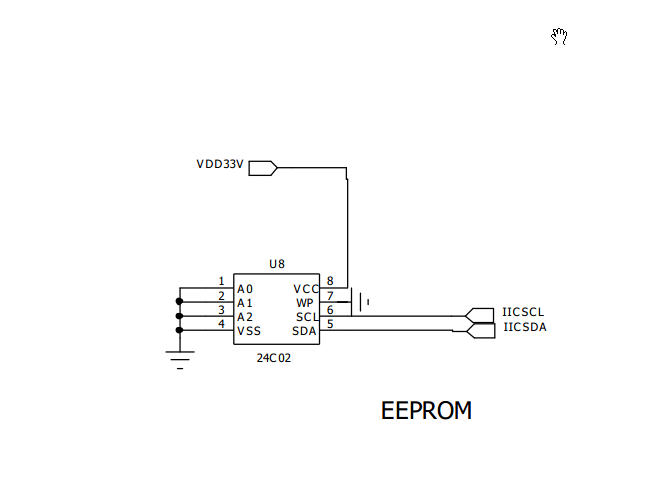
图4 AT24C02电路图
5.i2c.h头文件
内核中i2c.h这个头文件对i2c_driver、i2c_client、i2c_adapter和i2c_algorithm着4个数据结构进行了定义。理解这4个结构的作用十分关键,代码清单1、2、3、4分别给出了它们的定义。
代码清单1 i2c_adapter结构体
1. /*
2. * i2c_adapter is the structure used to identify a physical i2c bus along
3. * with the access algorithms necessary to access it.
4. */
5. struct i2c_adapter {
6. struct module *owner;
7. unsigned int class; /* classes to allow probing for */
8. const struct i2c_algorithm *algo; /* the algorithm to access the bus */
9. void *algo_data;
10. /* data fields that are valid for all devices */
11. struct rt_mutex bus_lock;
12. int timeout; /* in jiffies */
13. int retries;
14. struct device dev; /* the adapter device */
15. int nr;
16. char name[48];
17. struct completion dev_released;
18. struct mutex userspace_clients_lock;
19. struct list_head userspace_clients;
20. };
代码清单2 i2c_algorithm结构体
1. /*
2. * The following structs are for those who like to implement new bus drivers:
3. * i2c_algorithm is the interface to a class of hardware solutions which can
4. * be addressed using the same bus algorithms - i.e. bit-banging or the PCF8584
5. * to name two of the most common.
6. */
7. struct i2c_algorithm {
8. /* If an adapter algorithm can't do I2C-level access, set master_xfer
9. to NULL. If an adapter algorithm can do SMBus access, set
10. smbus_xfer. If set to NULL, the SMBus protocol is simulated
11. using common I2C messages */
12. /* master_xfer should return the number of messages successfully
13. processed, or a negative value on error */
14. int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs,
15. int num);
16. int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr,
17. unsigned short flags, char read_write,
18. u8 command, int size, union i2c_smbus_data *data);
19. /* To determine what the adapter supports */
20. u32 (*functionality) (struct i2c_adapter *);
21. };
上述代码第4行对应为SMBus传输函数指针,SMBus大部分基于I2C总线规范,SMBus不需要增加额外引脚。与I2C总线相比,SMBus增加了一些新的功能特性,在访问时序也有一定的差异。
代码清单3 i2c_driver结构体
1. /*
2. * struct i2c_driver - represent an I2C device driver
3. * @class: What kind of i2c device we instantiate (for detect)
4. * @attach_adapter: Callback for bus addition (deprecated)
5. * @detach_adapter: Callback for bus removal (deprecated)
6. * @probe: Callback for device binding
7. * @remove: Callback for device unbinding
8. * @shutdown: Callback for device shutdown
9. * @suspend: Callback for device suspend
10. * @resume: Callback for device resume
11. * @alert: Alert callback, for example for the SMBus alert protocol
12. * @command: Callback for bus-wide signaling (optional)
13. * @driver: Device driver model driver
14. * @id_table: List of I2C devices supported by this driver
15. * @detect: Callback for device detection
16. * @address_list: The I2C addresses to probe (for detect)
17. * @clients: List of detected clients we created (for i2c-core use only)
18. *
19. * The driver.owner field should be set to the module owner of this driver.
20. * The driver.name field should be set to the name of this driver.
21. *
22. * For automatic device detection, both @detect and @address_data must
23. * be defined. @class should also be set, otherwise only devices forced
24. * with module parameters will be created. The detect function must
25. * fill at least the name field of the i2c_board_info structure it is
26. * handed upon successful detection, and possibly also the flags field.
27. *
28. * If @detect is missing, the driver will still work fine for enumerated
29. * devices. Detected devices simply won't be supported. This is expected
30. * for the many I2C/SMBus devices which can't be detected reliably, and
31. * the ones which can always be enumerated in practice.
32. *
33. * The i2c_client structure which is handed to the @detect callback is
34. * not a real i2c_client. It is initialized just enough so that you can
35. * call i2c_smbus_read_byte_data and friends on it. Don't do anything
36. * else with it. In particular, calling dev_dbg and friends on it is
37. * not allowed.
38. */
39. struct i2c_driver {
40. unsigned int class;
41. /* Notifies the driver that a new bus has appeared or is about to be
42. * removed. You should avoid using this, it will be removed in a
43. * near future.
44. */
45. int (*attach_adapter)(struct i2c_adapter *) __deprecated;
46. int (*detach_adapter)(struct i2c_adapter *) __deprecated;
47. /* Standard driver model interfaces */
48. int (*probe)(struct i2c_client *, const struct i2c_device_id *);
49. int (*remove)(struct i2c_client *);
50. /* driver model interfaces that don't relate to enumeration */
51. void (*shutdown)(struct i2c_client *);
52. int (*suspend)(struct i2c_client *, pm_message_t mesg);
53. int (*resume)(struct i2c_client *);
54. /* Alert callback, for example for the SMBus alert protocol.
55. * The format and meaning of the data value depends on the protocol.
56. * For the SMBus alert protocol, there is a single bit of data passed
57. * as the alert response's low bit ("event flag").
58. */
59. void (*alert)(struct i2c_client *, unsigned int data);
60. /* a ioctl like command that can be used to perform specific functions
61. * with the device.
62. */
63. int (*command)(struct i2c_client *client, unsigned int cmd, void *arg);
64. struct device_driver driver;
65. const struct i2c_device_id *id_table;
66. /* Device detection callback for automatic device creation */
67. int (*detect)(struct i2c_client *, struct i2c_board_info *);
68. const unsigned short *address_list;
69. struct list_head clients;
70. };
代码清单4 i2c_client结构体
1. /*
2. * struct i2c_client - represent an I2C slave device
3. * @flags: I2C_CLIENT_TEN indicates the device uses a ten bit chip address;
4. * I2C_CLIENT_PEC indicates it uses SMBus Packet Error Checking
5. * @addr: Address used on the I2C bus connected to the parent adapter.
6. * @name: Indicates the type of the device, usually a chip name that's
7. * generic enough to hide second-sourcing and compatible revisions.
8. * @adapter: manages the bus segment hosting this I2C device
9. * @driver: device's driver, hence pointer to access routines
10. * @dev: Driver model device node for the slave.
11. * @irq: indicates the IRQ generated by this device (if any)
12. * @detected: member of an i2c_driver.clients list or i2c-core's
13. * userspace_devices list
14. *
15. * An i2c_client identifies a single device (i.e. chip) connected to an
16. * i2c bus. The behaviour exposed to Linux is defined by the driver
17. * managing the device.
18. */
19. struct i2c_client {
20. unsigned short flags; /* div., see below */
21. unsigned short addr; /* chip address - NOTE: 7bit */
22. /* addresses are stored in the */
23. /* _LOWER_ 7 bits */
24. char name[I2C_NAME_SIZE];
25. struct i2c_adapter *adapter; /* the adapter we sit on */
26. struct i2c_driver *driver; /* and our access routines */
27. struct device dev; /* the device structure */
28. int irq; /* irq issued by device */
29. struct list_head detected;
30. };
下面分析i2c_driver、i2c_client、i2c_adapter和i2c_algorithm这4个数据结构的作用及盘根错节的关系。
(1)2c_adapter与i2c_algorithm
i2c_adapter对应于物理上的一个适配器,而i2c_algorithm对应一套通信方法。一个I2C适配器需要i2c_algorithm中提供的通信函数来控制适配器上产生特定的访问周期。缺少i2c_algorithm的i2c_adapter什么也做不了,因此i2c_adapter中包含其使用的i2c_algorithm的指针。
I2c_algorithm中关键函数master_xfer用于产生I2C访问周期需要的信号,以i2c_msg(即I2C消息)为单位。I2c_msg结构体非常关键,代码清单5给出了它的定义。
代码清单5 i2c_msg结构体
/**
* struct i2c_msg - an I2C transaction segment beginning with START
* @addr: Slave address, either seven or ten bits. When this is a ten
* bit address, I2C_M_TEN must be set in @flags and the adapter
* must support I2C_FUNC_10BIT_ADDR.
* @flags: I2C_M_RD is handled by all adapters. No other flags may be
* provided unless the adapter exported the relevant I2C_FUNC_*
* flags through i2c_check_functionality().
* @len: Number of data bytes in @buf being read from or written to the
* I2C slave address. For read transactions where I2C_M_RECV_LEN
* is set, the caller guarantees that this buffer can hold up to
* 32 bytes in addition to the initial length byte sent by the
* slave (plus, if used, the SMBus PEC); and this value will be
* incremented by the number of block data bytes received.
* @buf: The buffer into which data is read, or from which it's written.
*
* An i2c_msg is the low level representation of one segment of an I2C
* transaction. It is visible to drivers in the @i2c_transfer() procedure,
* to userspace from i2c-dev, and to I2C adapter drivers through the
* @i2c_adapter.@master_xfer() method.
*
* Except when I2C "protocol mangling" is used, all I2C adapters implement
* the standard rules for I2C transactions. Each transaction begins with a
* START. That is followed by the slave address, and a bit encoding read
* versus write. Then follow all the data bytes, possibly including a byte
* with SMBus PEC. The transfer terminates with a NAK, or when all those
* bytes have been transferred and ACKed. If this is the last message in a
* group, it is followed by a STOP. Otherwise it is followed by the next
* @i2c_msg transaction segment, beginning with a (repeated) START.
*
* Alternatively, when the adapter supports I2C_FUNC_PROTOCOL_MANGLING then
* passing certain @flags may have changed those standard protocol behaviors.
* Those flags are only for use with broken/nonconforming slaves, and with
* adapters which are known to support the specific mangling options they
* need (one or more of IGNORE_NAK, NO_RD_ACK, NOSTART, and REV_DIR_ADDR).
*/
struct i2c_msg {
__u16 addr; /* slave address */
__u16 flags;
#define I2C_M_TEN 0x0010 /* this is a ten bit chip address */
#define I2C_M_RD 0x0001 /* read data, from slave to master */
#define I2C_M_NOSTART 0x4000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_REV_DIR_ADDR 0x2000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_IGNORE_NAK 0x1000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_NO_RD_ACK 0x0800 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_RECV_LEN 0x0400 /* length will be first received byte */
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};
(2)i2c_driver与i2c_client
i2c_driver对应一套驱动方法,其主要成员函数是probe()、remove()、suspend()、resume()等,另外id_table是该驱动所支持的I2C设备的ID表。i2c_client对应于真实的物理设备,每个I2C设备都需要一个i2c_client来描述。I2c_driver和i2c_client的关系是一对多,一个i2c_driver上可以支持多个同类型的i2c_client。
I2c_client信息通常在BSP的板文件中通过i2c_board_info填充,如下面代码就定义了一个I2C设备ID为“24c02”、地址为0x50的i2c_client:
代码清单6 i2c_board_info结构体定义
1. static struct i2c_board_info __initdata smdk2440_i2c_devs[] = {
2. {
3. I2C_BOARD_INFO("24c02", 0x50),
4. .platform_data = &at24c02,
5. },
6. /* more devices can be added using expansion connectors */
7. };
在I2C总线驱动i2c_bus_type的match()函数i2c_device_match()中,会调用i2c_match_id()函数匹配板文件中定义的ID和i2c_driver所支持的ID表。
代码清单7 i2c_device_match函数在linux-3.0/drivers/i2c/i2c-core.c
1. static int i2c_device_match(struct device *dev, struct device_driver *drv)
2. {
3. struct i2c_client *client = i2c_verify_client(dev);
4. struct i2c_driver *driver;
5. if (!client)
6. return 0;
7. /* Attempt an OF style match */
8. if (of_driver_match_device(dev, drv))
9. return 1;
10. driver = to_i2c_driver(drv);
11. /* match on an id table if there is one */
12. if (driver->id_table)
13. return i2c_match_id(driver->id_table, client) != NULL;
14. return 0;
15. }
(3)i2c_adpater与i2c_client
i2c_adapter与i2c_client的关系与I2C硬件体系中适配器和设备的关系一致,即i2c_client依附于i2c_adapter。由于一个适配器上可以连接多个I2C设备,所以一个i2c_adapter也可以被多个i2c_client依附,i2c_adapter中包含依附于它的i2c_client的链表。
代码清单8 i2c_client的链表
1. struct list_head userspace_clients;
假设I2C总线适配器xxx上有两个使用相同驱动程序的yyyI2C设备,在打开I2C总线的设备节点后相关数据结构之间的逻辑组织关系将如下图所示:
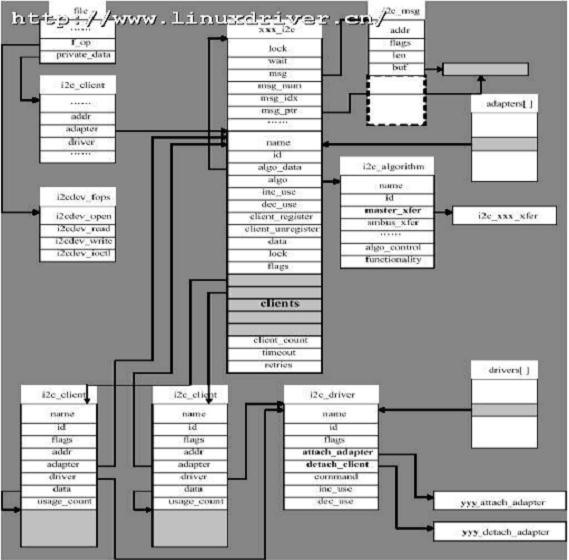
图5 I2C总线的设备节点后相关数据结构之间的逻辑组织关系图
从上面的分析可知,虽然I2C硬件体系结构简单,但是I2C体系结构在linux中的实现却相当复杂。当工程师拿到实际的电路板,面对复杂的linux I2C子系统,应该如何下手写驱动呢?究竟要哪些是需要亲自做的,哪些是内核已经提供的呢?理清这个问题非常有意义,可以使我们面对具体问题时迅速地抓住重点。
一方面,适配器驱动可能是linux内核本身还不包含的;另一方面,挂接在适配器上的就提设备可能也是linux内核还不包含的。因此,工程师要实现的主要工作如下。
提供I2C适配器的硬件驱动,探测、初始化I2C适配器(如申请I2C的I/O地址和中断号)、驱动CPU控制的I2C适配器从硬件上产生各种信号以及处理I2C中断等。
提供I2C适配器的algorithm,具体适配器的xxx_xfer()函数填充i2c_algorithm的master_xfer指针,并把i2c_algorithm指针赋值给i2c_adapter的algo指针。
实现I2C设备驱动中的i2c_driver接口,具体设备yyy_probe()、yyy_remove()、yyy_suspend()、yyy_resume()函数指针和i2c_device_id设备ID表赋值给i2c_driver的probe、remove、suspend、resume和id_table指针。
实现I2C设备所对应类型的具体驱动,i2c_driver只是实现设备与总线的挂接,而挂接在总线上的设备则是千差万别的。例如,如果字符设备,就实现文件操作接口,即实现具体yyy的yyy_read()、yyy_write()和yyy_ioctl()函数等;如果是声卡,就实现ALSA驱动。
二、I2C的第一部分
1.Linux I2C核心
I2C核心(driver/i2c/i2c-core.c)文件中提供了一组不依赖与硬件平台的接口函数,这个文件一般不需要被工程师修改,但是理解其中的主要函数非常关键,因为I2C总线驱动和设备驱动之间依赖于I2C核心作为纽带I2C核心中的主要函数如下。
2.增加/删除i2c_adapter
代码清单9 i2c_add_adapter函数:
1. /**
2. * i2c_add_adapter - declare i2c adapter, use dynamic bus number
3. * @adapter: the adapter to add
4. * Context: can sleep
5. *
6. * This routine is used to declare an I2C adapter when its bus number
7. * doesn't matter. Examples: for I2C adapters dynamically added by
8. * USB links or PCI plugin cards.
9. *
10. * When this returns zero, a new bus number was allocated and stored
11. * in adap->nr, and the specified adapter became available for clients.
12. * Otherwise, a negative errno value is returned.
13. */
14. int i2c_add_adapter(struct i2c_adapter *adapter)
15. {
16. int id, res = 0;
17. retry:
18. if (idr_pre_get(&i2c_adapter_idr, GFP_KERNEL) == 0)
19. return -ENOMEM;
20. mutex_lock(&core_lock);
21. /* "above" here means "above or equal to", sigh */
22. res = idr_get_new_above(&i2c_adapter_idr, adapter,
23. __i2c_first_dynamic_bus_num, &id);
24. mutex_unlock(&core_lock);
25. if (res < 0) {
26. if (res == -EAGAIN)
27. goto retry;
28. return res;
29. }
30. adapter->nr = id;
31. return i2c_register_adapter(adapter);
32. }
33. EXPORT_SYMBOL(i2c_add_adapter);
代码清单10 I2c_del_adapter函数:
1. /**
2. * i2c_del_adapter - unregister I2C adapter
3. * @adap: the adapter being unregistered
4. * Context: can sleep
5. *
6. * This unregisters an I2C adapter which was previously registered
7. * by @i2c_add_adapter or @i2c_add_numbered_adapter.
8. */
9. int i2c_del_adapter(struct i2c_adapter *adap)
10. {
11. int res = 0;
12. struct i2c_adapter *found;
13. struct i2c_client *client, *next;
14. /* First make sure that this adapter was ever added */
15. mutex_lock(&core_lock);
16. found = idr_find(&i2c_adapter_idr, adap->nr);
17. mutex_unlock(&core_lock);
18. if (found != adap) {
19. pr_debug("i2c-core: attempting to delete unregistered "
20. "adapter [%s]\n", adap->name);
21. return -EINVAL;
22. }
23. /* Tell drivers about this removal */
24. mutex_lock(&core_lock);
25. res = bus_for_each_drv(&i2c_bus_type, NULL, adap,
26. __process_removed_adapter);
27. mutex_unlock(&core_lock);
28. if (res)
29. return res;
30. /* Remove devices instantiated from sysfs */
31. mutex_lock(&adap->userspace_clients_lock);
32. list_for_each_entry_safe(client, next, &adap->userspace_clients,
33. detected) {
34. dev_dbg(&adap->dev, "Removing %s at 0x%x\n", client->name,
35. client->addr);
36. list_del(&client->detected);
37. i2c_unregister_device(client);
38. }
39. mutex_unlock(&adap->userspace_clients_lock);
40.
41. /* Detach any active clients. This can't fail, thus we do not
42. * check the returned value. This is a two-pass process, because
43. * we can't remove the dummy devices during the first pass: they
44. * could have been instantiated by real devices wishing to clean
45. * them up properly, so we give them a chance to do that first. */
46. res = device_for_each_child(&adap->dev, NULL, __unregister_client);
47. res = device_for_each_child(&adap->dev, NULL, __unregister_dummy);
48.
49. #ifdef CONFIG_I2C_COMPAT
50. class_compat_remove_link(i2c_adapter_compat_class, &adap->dev,
51. adap->dev.parent);
52. #endif
53.
54. /* device name is gone after device_unregister */
55. dev_dbg(&adap->dev, "adapter [%s] unregistered\n", adap->name);
56.
57. /* clean up the sysfs representation */
58. init_completion(&adap->dev_released);
59. device_unregister(&adap->dev);
60.
61. /* wait for sysfs to drop all references */
62. wait_for_completion(&adap->dev_released);
63.
64. /* free bus id */
65. mutex_lock(&core_lock);
66. idr_remove(&i2c_adapter_idr, adap->nr);
67. mutex_unlock(&core_lock);
68.
69. /* Clear the device structure in case this adapter is ever going to be
70. added again */
71. memset(&adap->dev, 0, sizeof(adap->dev));
72.
73. return 0;
74. }
75. EXPORT_SYMBOL(i2c_del_adapter);
3.增加/删除i2c_driver
代码清单11 I2c_register_driver函数:
1. static int i2c_register_adapter(struct i2c_adapter *adap)
2. {
3. int res = 0;
4.
5. /* Can't register until after driver model init */
6. if (unlikely(WARN_ON(!i2c_bus_type.p))) {
7. res = -EAGAIN;
8. goto out_list;
9. }
10.
11. /* Sanity checks */
12. if (unlikely(adap->name[0] == '\0')) {
13. pr_err("i2c-core: Attempt to register an adapter with "
14. "no name!\n");
15. return -EINVAL;
16. }
17. if (unlikely(!adap->algo)) {
18. pr_err("i2c-core: Attempt to register adapter '%s' with "
19. "no algo!\n", adap->name);
20. return -EINVAL;
21. }
22.
23. rt_mutex_init(&adap->bus_lock);
24. mutex_init(&adap->userspace_clients_lock);
25. INIT_LIST_HEAD(&adap->userspace_clients);
26.
27. /* Set default timeout to 1 second if not already set */
28. if (adap->timeout == 0)
29. adap->timeout = HZ;
30.
31. dev_set_name(&adap->dev, "i2c-%d", adap->nr);
32. adap->dev.bus = &i2c_bus_type;
33. adap->dev.type = &i2c_adapter_type;
34. res = device_register(&adap->dev);
35. if (res)
36. goto out_list;
37.
38. dev_dbg(&adap->dev, "adapter [%s] registered\n", adap->name);
39.
40. #ifdef CONFIG_I2C_COMPAT
41. res = class_compat_create_link(i2c_adapter_compat_class, &adap->dev,
42. adap->dev.parent);
43. if (res)
44. dev_warn(&adap->dev,
45. "Failed to create compatibility class link\n");
46. #endif
47.
48. /* create pre-declared device nodes */
49. if (adap->nr < __i2c_first_dynamic_bus_num)
50. i2c_scan_static_board_info(adap);
51.
52. /* Notify drivers */
53. mutex_lock(&core_lock);
54. bus_for_each_drv(&i2c_bus_type, NULL, adap, __process_new_adapter);
55. mutex_unlock(&core_lock);
56.
57. return 0;
58.
59. out_list:
60. mutex_lock(&core_lock);
61. idr_remove(&i2c_adapter_idr, adap->nr);
62. mutex_unlock(&core_lock);
63. return res;
64. }
代码清单12 i2c_del_driver函数:
1. /*
2. * i2c_del_driver - unregister I2C driver
3. * @driver: the driver being unregistered
4. * Context: can sleep
5. */
6. void i2c_del_driver(struct i2c_driver *driver)
7. {
8. i2c_for_each_dev(driver, __process_removed_driver);
9.
10. driver_unregister(&driver->driver);
11. pr_debug("i2c-core: driver [%s] unregistered\n", driver->driver.name);
12. }
13. EXPORT_SYMBOL(i2c_del_driver);
4.i2c_client依附/脱离
当一个具体的client被侦测到并被关联的时候,设备和使用爽肤水文件件被注册。相反地,在client杯取消关联的时候,sysfs文件和设备也被注销。如下代码清单13。
代码清单13 i2c_new_device函数:
1. /**
2. * i2c_new_device - instantiate an i2c device
3. * @adap: the adapter managing the device
4. * @info: describes one I2C device; bus_num is ignored
5. * Context: can sleep
6. *
7. * Create an i2c device. Binding is handled through driver model
8. * probe()/remove() methods. A driver may be bound to this device when we
9. * return from this function, or any later moment (e.g. maybe hotplugging will
10. * load the driver module). This call is not appropriate for use by mainboard
11. * initialization logic, which usually runs during an arch_initcall() long
12. * before any i2c_adapter could exist.
13. *
14. * This returns the new i2c client, which may be saved for later use with
15. * i2c_unregister_device(); or NULL to indicate an error.
16. */
17. struct i2c_client *
18. i2c_new_device(struct i2c_adapter *adap, struct i2c_board_info const *info)
19. {
20. struct i2c_client *client;
21. int status;
22.
23. client = kzalloc(sizeof *client, GFP_KERNEL);
24. if (!client)
25. return NULL;
26.
27. client->adapter = adap;
28.
29. client->dev.platform_data = info->platform_data;
30.
31. if (info->archdata)
32. client->dev.archdata = *info->archdata;
33.
34. client->flags = info->flags;
35. client->addr = info->addr;
36. client->irq = info->irq;
37.
38. strlcpy(client->name, info->type, sizeof(client->name));
39.
40. /* Check for address validity */
41. status = i2c_check_client_addr_validity(client);
42. if (status) {
43. dev_err(&adap->dev, "Invalid %d-bit I2C address 0x%02hx\n",
44. client->flags & I2C_CLIENT_TEN ? 10 : 7, client->addr);
45. goto out_err_silent;
46. }
47.
48. /* Check for address business */
49. status = i2c_check_addr_busy(adap, client->addr);
50. if (status)
51. goto out_err;
52.
53. client->dev.parent = &client->adapter->dev;
54. client->dev.bus = &i2c_bus_type;
55. client->dev.type = &i2c_client_type;
56. client->dev.of_node = info->of_node;
57.
58. dev_set_name(&client->dev, "%d-%04x", i2c_adapter_id(adap),
59. client->addr);
60. status = device_register(&client->dev);
61. if (status)
62. goto out_err;
63.
64. dev_dbg(&adap->dev, "client [%s] registered with bus id %s\n",
65. client->name, dev_name(&client->dev));
66.
67. return client;
68.
69. out_err:
70. dev_err(&adap->dev, "Failed to register i2c client %s at 0x%02x "
71. "(%d)\n", client->name, client->addr, status);
72. out_err_silent:
73. kfree(client);
74. return NULL;
75. }
76. EXPORT_SYMBOL_GPL(i2c_new_device);
77.
78. 代码清单14 i2c_unregister_device函数
79. /**
80. * i2c_unregister_device - reverse effect of i2c_new_device()
81. * @client: value returned from i2c_new_device()
82. * Context: can sleep
83. */
84. void i2c_unregister_device(struct i2c_client *client)
85. {
86. device_unregister(&client->dev);
87. }
88. EXPORT_SYMBOL_GPL(i2c_unregister_device);
5.I2C传输、发送和接收
I2c_transfer()函数本身不具备驱动适配器物理硬件完成消息交互的能力,它只是寻找到i2c_adapter对应的i2c_algorithm,并使用i2c_algorithm的master_xfer()函数真正驱动硬件流程。
代码清单15 i2c_transfer函数
1. /* ----------------------------------------------------
2. * the functional interface to the i2c busses.
3. * ----------------------------------------------------
4. */
5.
6. /**
7. * i2c_transfer - execute a single or combined I2C message
8. * @adap: Handle to I2C bus
9. * @msgs: One or more messages to execute before STOP is issued to
10. * terminate the operation; each message begins with a START.
11. * @num: Number of messages to be executed.
12. *
13. * Returns negative errno, else the number of messages executed.
14. *
15. * Note that there is no requirement that each message be sent to
16. * the same slave address, although that is the most common model.
17. */
18. int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num)
19. {
20. unsigned long orig_jiffies;
21. int ret, try;
22.
23. /* REVISIT the fault reporting model here is weak:
24. *
25. * - When we get an error after receiving N bytes from a slave,
26. * there is no way to report "N".
27. *
28. * - When we get a NAK after transmitting N bytes to a slave,
29. * there is no way to report "N" ... or to let the master
30. * continue executing the rest of this combined message, if
31. * that's the appropriate response.
32. *
33. * - When for example "num" is two and we successfully complete
34. * the first message but get an error part way through the
35. * second, it's unclear whether that should be reported as
36. * one (discarding status on the second message) or errno
37. * (discarding status on the first one).
38. */
39.
40. if (adap->algo->master_xfer) {
41. #ifdef DEBUG
42. for (ret = 0; ret < num; ret++) {
43. dev_dbg(&adap->dev, "master_xfer[%d] %c, addr=0x%02x, "
44. "len=%d%s\n", ret, (msgs[ret].flags & I2C_M_RD)
45. ? 'R' : 'W', msgs[ret].addr, msgs[ret].len,
46. (msgs[ret].flags & I2C_M_RECV_LEN) ? "+" : "");
47. }
48. #endif
49.
50. if (in_atomic() || irqs_disabled()) {
51. ret = i2c_trylock_adapter(adap);
52. if (!ret)
53. /* I2C activity is ongoing. */
54. return -EAGAIN;
55. } else {
56. i2c_lock_adapter(adap);
57. }
58.
59. /* Retry automatically on arbitration loss */
60. orig_jiffies = jiffies;
61. for (ret = 0, try = 0; try <= adap->retries; try++) {
62. ret = adap->algo->master_xfer(adap, msgs, num);
63. if (ret != -EAGAIN)
64. break;
65. if (time_after(jiffies, orig_jiffies + adap->timeout))
66. break;
67. }
68. i2c_unlock_adapter(adap);
69.
70. return ret;
71. } else {
72. dev_dbg(&adap->dev, "I2C level transfers not supported\n");
73. return -EOPNOTSUPP;
74. }
75. }
76. EXPORT_SYMBOL(i2c_transfer);
代码清单16 i2c_master_send函数
1. /**
2. * i2c_master_send - issue a single I2C message in master transmit mode
3. * @client: Handle to slave device
4. * @buf: Data that will be written to the slave
5. * @count: How many bytes to write, must be less than 64k since msg.len is u16
6. *
7. * Returns negative errno, or else the number of bytes written.
8. */
9. int i2c_master_send(const struct i2c_client *client, const char *buf, int count)
10. {
11. int ret;
12. struct i2c_adapter *adap = client->adapter;
13. struct i2c_msg msg;
14.
15. msg.addr = client->addr;
16. msg.flags = client->flags & I2C_M_TEN;
17. msg.len = count;
18. msg.buf = (char *)buf;
19.
20. ret = i2c_transfer(adap, &msg, 1);
21.
22. /* If everything went ok (i.e. 1 msg transmitted), return #bytes
23. transmitted, else error code. */
24. return (ret == 1) ? count : ret;
25. }
26. EXPORT_SYMBOL(i2c_master_send);
代码清单17 i2c_master_recv函数
1. /**
2. * i2c_master_recv - issue a single I2C message in master receive mode
3. * @client: Handle to slave device
4. * @buf: Where to store data read from slave
5. * @count: How many bytes to read, must be less than 64k since msg.len is u16
6. *
7. * Returns negative errno, or else the number of bytes read.
8. */
9. int i2c_master_recv(const struct i2c_client *client, char *buf, int count)
10. {
11. struct i2c_adapter *adap = client->adapter;
12. struct i2c_msg msg;
13. int ret;
14.
15. msg.addr = client->addr;
16. msg.flags = client->flags & I2C_M_TEN;
17. msg.flags |= I2C_M_RD;
18. msg.len = count;
19. msg.buf = buf;
20.
21. ret = i2c_transfer(adap, &msg, 1);
22.
23. /* If everything went ok (i.e. 1 msg transmitted), return #bytes
24. transmitted, else error code. */
25. return (ret == 1) ? count : ret;
26. }
27. EXPORT_SYMBOL(i2c_master_recv);
i2c_transfer()函数用于进行I2C适配器和I2C设备之间的一组消息交互,i2c_master_send()函数和i2c_master_recv()函数内部会调用i2c_transfer函数分别完成一条写消息和一条读消息。
三、I2c的第二部分
1.2C总线驱动
(1)I2c总线驱动模块的加载函数要完成两个工作。
l 第一个是初始化i2c适配器所使用的硬件资源,如申请I/O地址、中断号等。
l 第二个是通过i2c_add_adapter()添加i2c_adapter的数据结构,当然这个i2c_adapter数据结构的成员已经被xxx适配器的相应的函数指针所初始化。
(2)I2C总线驱动模块的卸载函数要完成的工作与加载函数相反。
l 释放I2C适配器所使用的硬件资源,如释放I/O地址,中断号等。
l 通过i2c_del_adapter()删除i2c_adapter的函数数据结构。
代码清单18所示为I2C适配器驱动的模块加载和卸载函数的模板。
代码清单18 I2C总线驱动的模板加载和卸载函数模板
1. static int __init i2c_adap_xxx_init(void)
2. {
3. xxx_adapter_hw_init();
4. I2c_add_adapter(&xxx_adapter);
5. }
6. subsys_initcall(i2c_adap_xxx_init);
7.
8. static void __exit i2c_adap_xxx_exit(void)
9. {
10. xxx_adapter_hw_free();
11. i2c_del_adapter(&xxx_adapter);
12. }
13. module_exit(i2c_adap_xxx_exit);
上述代码中xxx_adapter_hw_init()和xxx_adapter_hw_free()函数的实现都与具体的CPU和I2C适配器硬件直接相关。
2.I2C总线通信方法
我们需要为特定的I2C适配器实现其通信方法,主要实现i2c_algorithm的master_xfer()函数和functionality()函数。
Functionality()函数非常简单,用于返回algorithm所支持的通信协议,如I2C_FUNC_I2C、I2C_FUNC_10BIT_ADDR、I2C_FUNC_SMBUS_READ_BYTE、I2C_FUNC_SUMBUS_WRITE_BYTE等。
Master_xfer()函数在I2C适配器上完成传递给它的i2c_msg数组中每个I2C消息,代码清单19所示为xxx设备的master_xfer()函数模板。
代码清单19 I2C总线驱动master_xfer()函数模板
1. static int i2c_adapter_xxx_xfer(structi2c_adapter *adap, struct i2c_msg *msgs, int num)
2. {
3. ......
4. for (i = 0; i < num; i++) {
5. i2c_adapter_xxx_start(); /*产生起始位*/
6. if (msgs[i]->flags & I2C_M_RD) { /*读取*/
7. i2c_adapter_xxx_setaddr((msg->addr << 1) | 1); /*发送从设备地址*/
8. i2c_adapter_xxx_wait_ack(); /*获得从设备的ACK*/
9. i2c_adapter_xxx_readbytes(msgs[i]->buf,msgs[i]->len); /*读取len长度的数据到buf中*/
10. } else {
11. i2c_adapter_xxx_setaddr(msg->addr << 1);
12. i2c_adapter_xxx_wait_ack();
13. i2c_adapter_xxx_writebytes(msgs[i]->buf, msgs[i]->len);
14. }
15. }
16. i2c_adapter_xxx_stop(); /*产生停止位*/
17. }
上述代码实际上给出了一个master_xfer()函数处理I2C消息数组的流程,对于数组中的每个消息,判断消息类型,若为读消息,则赋从设备地址为(msg->addr<<1)|1,否则为msg->addr<<1,对每个消息产生一个开始位,紧接着传送从设备的地址,然后开始数据的发送或接收,队最后的消息还需产生一个停止位。
master_xfer()函数模板中i2c_adapter_xxx_start()、i2c_adapter_xxx_setaddr()、i2c_adapter_xxx_wait_ack()、i2c_adapter_xxx_readbytes()、i2c_adapter_xxx_stop()函数用于完成适配器底层硬件操作,与I2C适配器和CPU的具体硬件直接相关,需要由工程师根据芯片的数据手册来实现。
I2c_adapter_xxx_readbytes()用于从设备上接收一串数据,i2c_adapter_xxx_writebytes()用于向从设备写入一串数据,这两个函数的内部也会涉及I2C总线协议中的ACK应答。
master_xfer()函数的实现在形式上会有很多样,即便是linux内核源代码中已经给出了一些I2C总线驱动的master_xfer()函数,由于由不同的组织或个人完成,风格上的差别也非常大,不一定能与模板完全对应,如master_xfer()函数模板给出的消息处理顺序进行的,而有的驱动以中断方式来完成这个流程。不管具体怎么实施,流程的本质都是不变的。因为这个流程不以驱动工程师的意志为转移,最终由I2C总线硬件上的通信协议决定。
多数I2C总线驱动会定义一个xxx_i2c结构体,作为i2c_adapter的algo_data(类似“是有数据”),其中包含I2C消息数组指针、数组索引及I2C适配器algorithm访问控制用的自旋锁、等待队列等,而master_xfer()函数完成消息数组中消息的处理也可通过对xxx_i2c结构体相关成员的访问来控制。代码清单20所示为xxx_i2c结构体的定义。
代码清单20 xxx_i2c结构体模板
1. struct xxx_i2c {
2. spinlock_t lock;
3. wait_queue_head_t wait;
4. struct i2c_msg *msg;
5. unsigned int msg_num;
6. unsigned int msg_idx;
7. unsigned int msg_ptr;
8. struct i2c_adapter adap;
9. };
对于s3c2440的i2c模块而言内核中做了如下的工作:
S3c2440处理器内部集成了一个I2C控制器,通过4个寄存器就可以方便地对其进行控制,这4个寄存器如下:
l IICCON:I2C控制寄存器。
l IICSTAT:I2C状态寄存器。
l IICDS:I2C收发数据移位寄存器。
l IICADD:I2C地址寄存器。
S3c2440处理器内部集成的I2C控制器可支持主、从两种模式,我们主要使用其主模式。通过对IICCON、IICDS和IICADD寄存器的操作,可
在I2C总线上产生开始位、停止位、数据和地址,而传输的状态则通过IICSTAT寄存器获取。
3.s3c2440 I2C 总线驱动总体分析
s3c_2440的I2C总线驱动driver/i2c/busses/i2c-s3c2410.c支持s3c24xx、s3c64xx、s5pc1xx和s5p64xx处理器,在我们使用的3.0内核版本中,其名称任然叫2410,显然是历史原因引起的。它主要完成以下工作。
设计对应于i2c_adapter_xxx_init()模板的s3c_2440的模块加载函数和对应于i2c_adapter_xxx_exit()函数模板的模块卸载函数。
设计对应于i2c_adapter_xxx_xfer()模板的s3c_2440适配器的通信方法函数。
针对s3c24xx、s3c64xx、s5pc1xx和s5p64xx处理器,functionality()函数s3c24xx_i2c_func()只需要简单地返回I2C_FUNC_I2C|I2C_FUNC_SUMBUS_EMUL|I2C_FUNU_PROTOCOL_MANGLING表明其支持的功能。
下图给出了s3c2440驱动中的主要函数与总线模板函数的对应关系,由于实现通信方法的方式不一样,模板的一个函数可能对应于s3c2440 I2C总线驱动的多个函数。

图6 i2c总线驱动模板于s3c2440 I2C总线驱动的映射
4.S3c2440 I2C适配器驱动的模板加载于卸载
I2C适配器驱动被作为一个单独的模块加载进内核,在模块的加载和卸载函数中,只需注册和注销一个platform——driver结构体,如代码清单21所示。
代码清单21 S3c2440 I2C
1. static int __init i2c_adap_s3c_init(void)
2. {
3. return platform_driver_register(&s3c24xx_i2c_driver);
4. }
5. subsys_initcall(i2c_adap_s3c_init);
6.
7. static void __exit i2c_adap_s3c_exit(void)
8. {
9. platform_driver_unregister(&s3c24xx_i2c_driver);
10. }
11. module_exit(i2c_adap_s3c_exit);
代码清单22 platfrom_driver_register()和platfrom_driver_unregister()函数
1. /**
2. * platform_driver_register - register a driver for platform-level devices
3. * @drv: platform driver structure
4. */
5. int platform_driver_register(struct platform_driver *drv)
6. {
7. drv->driver.bus = &platform_bus_type;
8. if (drv->probe)
9. drv->driver.probe = platform_drv_probe;
10. if (drv->remove)
11. drv->driver.remove = platform_drv_remove;
12. if (drv->shutdown)
13. drv->driver.shutdown = platform_drv_shutdown;
14.
15. return driver_register(&drv->driver);
16. }
17. EXPORT_SYMBOL_GPL(platform_driver_register);
18.
19. /**
20. * platform_driver_unregister - unregister a driver for platform-level devices
21. * @drv: platform driver structure
22. */
23. void platform_driver_unregister(struct platform_driver *drv)
24. {
25. driver_unregister(&drv->driver);
26. }
27. EXPORT_SYMBOL_GPL(platform_driver_unregister);
Platfrom_driver结构体包含了具体适配器的probe()函数、remove()函数、resume()函数指针等信息,它需要被定义和赋值,如代码清单23所示。
代码清单23 platfrom_driver结构体
1. static struct platform_driver s3c24xx_i2c_driver = {
2. .probe = s3c24xx_i2c_probe,
3. .remove = s3c24xx_i2c_remove,
4. .id_table = s3c24xx_driver_ids,
5. .driver = {
6. .owner = THIS_MODULE,
7. .name = "s3c-i2c",
8. .pm = S3C24XX_DEV_PM_OPS,
9. },
10. };
当通过linux内核源代码/drivers/base/platform.c文件中定义platform_driver_register()函数注册platfrom_driver结构体时,其中probe指针指向s3c24xx_i2c_probe()函数将被调用,以初始化适配器硬件。s3c24xx_i2c_init()函数会调用函数。
代码清单24 s3c24xx_i2c_init()函数
1. /* s3c24xx_i2c_init
2. *
3. * initialise the controller, set the IO lines and frequency
4. */
5.
6. static int s3c24xx_i2c_init(struct s3c24xx_i2c *i2c)
7. {
8. unsigned long iicon = S3C2410_IICCON_IRQEN | S3C2410_IICCON_ACKEN;
9. struct s3c2410_platform_i2c *pdata;
10. unsigned int freq;
11.
12. /* get the plafrom data */
13.
14. pdata = i2c->dev->platform_data;
15.
16. /* inititalise the gpio */
17.
18. if (pdata->cfg_gpio)
19. pdata->cfg_gpio(to_platform_device(i2c->dev));
20.
21. /* write slave address */
22.
23. writeb(pdata->slave_addr, i2c->regs + S3C2410_IICADD);
24.
25. dev_info(i2c->dev, "slave address 0x%02x\n", pdata->slave_addr);
26.
27. writel(iicon, i2c->regs + S3C2410_IICCON);
28.
29. /* we need to work out the divisors for the clock... */
30.
31. if (s3c24xx_i2c_clockrate(i2c, &freq) != 0) {
32. writel(0, i2c->regs + S3C2410_IICCON);
33. dev_err(i2c->dev, "cannot meet bus frequency required\n");
34. return -EINVAL;
35. }
36.
37. /* todo - check that the i2c lines aren't being dragged anywhere */
38.
39. dev_info(i2c->dev, "bus frequency set to %d KHz\n", freq);
40. dev_dbg(i2c->dev, "S3C2410_IICCON=0x%02lx\n", iicon);
41.
42. return 0;
43. }
44.
代码清单25 s3c24xx_i2c_probe()函数
1. /* s3c24xx_i2c_probe
2. *
3. * called by the bus driver when a suitable device is found
4. */
5.
6. static int s3c24xx_i2c_probe(struct platform_device *pdev)
7. {
8. struct s3c24xx_i2c *i2c;
9. struct s3c2410_platform_i2c *pdata;
10. struct resource *res;
11. int ret;
12.
13. pdata = pdev->dev.platform_data;
14. if (!pdata) {
15. dev_err(&pdev->dev, "no platform data\n");
16. return -EINVAL;
17. }
18.
19. i2c = kzalloc(sizeof(struct s3c24xx_i2c), GFP_KERNEL);
20. if (!i2c) {
21. dev_err(&pdev->dev, "no memory for state\n");
22. return -ENOMEM;
23. }
24.
25. strlcpy(i2c->adap.name, "s3c2410-i2c", sizeof(i2c->adap.name));
26. i2c->adap.owner = THIS_MODULE;
27. i2c->adap.algo = &s3c24xx_i2c_algorithm;
28. i2c->adap.retries = 2;
29. i2c->adap.class = I2C_CLASS_HWMON | I2C_CLASS_SPD;
30. i2c->tx_setup = 50;
31.
32. spin_lock_init(&i2c->lock);
33. init_waitqueue_head(&i2c->wait);
34.
35. /* find the clock and enable it */
36.
37. i2c->dev = &pdev->dev;
38. i2c->clk = clk_get(&pdev->dev, "i2c");
39. if (IS_ERR(i2c->clk)) {
40. dev_err(&pdev->dev, "cannot get clock\n");
41. ret = -ENOENT;
42. goto err_noclk;
43. }
44.
45. dev_dbg(&pdev->dev, "clock source %p\n", i2c->clk);
46.
47. clk_enable(i2c->clk);
48.
49. /* map the registers */
50.
51. res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
52. if (res == NULL) {
53. dev_err(&pdev->dev, "cannot find IO resource\n");
54. ret = -ENOENT;
55. goto err_clk;
56. }
57.
58. i2c->ioarea = request_mem_region(res->start, resource_size(res),
59. pdev->name);
60.
61. if (i2c->ioarea == NULL) {
62. dev_err(&pdev->dev, "cannot request IO\n");
63. ret = -ENXIO;
64. goto err_clk;
65. }
66.
67. i2c->regs = ioremap(res->start, resource_size(res));
68.
69. if (i2c->regs == NULL) {
70. dev_err(&pdev->dev, "cannot map IO\n");
71. ret = -ENXIO;
72. goto err_ioarea;
73. }
74.
75. dev_dbg(&pdev->dev, "registers %p (%p, %p)\n",
76. i2c->regs, i2c->ioarea, res);
77.
78. /* setup info block for the i2c core */
79.
80. i2c->adap.algo_data = i2c;
81. i2c->adap.dev.parent = &pdev->dev;
82.
83. /* initialise the i2c controller */
84.
85. ret = s3c24xx_i2c_init(i2c);
86. if (ret != 0)
87. goto err_iomap;
88.
89. /* find the IRQ for this unit (note, this relies on the init call to
90. * ensure no current IRQs pending
91. */
92.
93. i2c->irq = ret = platform_get_irq(pdev, 0);
94. if (ret <= 0) {
95. dev_err(&pdev->dev, "cannot find IRQ\n");
96. goto err_iomap;
97. }
98.
99. ret = request_irq(i2c->irq, s3c24xx_i2c_irq, IRQF_DISABLED,
100. dev_name(&pdev->dev), i2c);
101.
102. if (ret != 0) {
103. dev_err(&pdev->dev, "cannot claim IRQ %d\n", i2c->irq);
104. goto err_iomap;
105. }
106.
107. ret = s3c24xx_i2c_register_cpufreq(i2c);
108. if (ret < 0) {
109. dev_err(&pdev->dev, "failed to register cpufreq notifier\n");
110. goto err_irq;
111. }
112.
113. /* Note, previous versions of the driver used i2c_add_adapter()
114. * to add the bus at any number. We now pass the bus number via
115. * the platform data, so if unset it will now default to always
116. * being bus 0.
117. */
118.
119. i2c->adap.nr = pdata->bus_num;
120.
121. ret = i2c_add_numbered_adapter(&i2c->adap);
122. if (ret < 0) {
123. dev_err(&pdev->dev, "failed to add bus to i2c core\n");
124. goto err_cpufreq;
125. }
126.
127. platform_set_drvdata(pdev, i2c);
128.
129. dev_info(&pdev->dev, "%s: S3C I2C adapter\n", dev_name(&i2c->adap.dev));
130. clk_disable(i2c->clk);
131. return 0;
132.
133. err_cpufreq:
134. s3c24xx_i2c_deregister_cpufreq(i2c);
135.
136. err_irq:
137. free_irq(i2c->irq, i2c);
138.
139. err_iomap:
140. iounmap(i2c->regs);
141.
142. err_ioarea:
143. release_resource(i2c->ioarea);
144. kfree(i2c->ioarea);
145.
146. err_clk:
147. clk_disable(i2c->clk);
148. clk_put(i2c->clk);
149.
150. err_noclk:
151. kfree(i2c);
152. return ret;
153. }
上述代码中的主体工作是使能硬件并且申请I2C适配器使用I/O地址、中断号等,在这些工作都完成无误后,通过I2C核心提供i2c_add_adapter函数添加这个适配器。当处理器包含多个I2C控制器时,我们通过板文件定义的platform数据中bus_num进行区分。
与s3c24xx_i2c_probe()函数完全相反的功能的函数是s3c24xx_i2c_remove()函数,它在适配器模块函数调用platform_driver_unregister函数是通过platfrom_driver的remove指针方式被调用。Xxx_i2c_remove()的设计模块如代码清单26所示。
********************************************************************************************
转载声明:希望大家能转载此文谢谢 原文链接
********************************************************************************************
代码清单26 s3c2440 I2C总线驱动中的s3c24xx_i2c_remove函数
1. /* s3c24xx_i2c_remove
2. *
3. * called when device is removed from the bus
4. */
5.
6. static int s3c24xx_i2c_remove(struct platform_device *pdev)
7. {
8. struct s3c24xx_i2c *i2c = platform_get_drvdata(pdev);
9.
10. s3c24xx_i2c_deregister_cpufreq(i2c);
11.
12. i2c_del_adapter(&i2c->adap);
13. free_irq(i2c->irq, i2c);
14.
15. clk_disable(i2c->clk);
16. clk_put(i2c->clk);
17.
18. iounmap(i2c->regs);
19.
20. release_resource(i2c->ioarea);
21. kfree(i2c->ioarea);
22. kfree(i2c);
23.
24. return 0;
25. }
上面的代码清单26中用到了s3c24xx_i2c结构体进行适配器所有信息的封装。类似于私有信息结构体,它与代码清单20所示的xxx_i2c结构体模板对应,代码清单27所示为s3c24xx_i2c结构体的定义。
代码清单27 s3c24xx_i2c结构体
1. struct s3c24xx_i2c {
2. spinlock_t lock;
3. wait_queue_head_t wait;
4. unsigned int suspended:1;
5.
6. struct i2c_msg *msg;
7. unsigned int msg_num;
8. unsigned int msg_idx;
9. unsigned int msg_ptr;
10.
11. unsigned int tx_setup;
12. unsigned int irq;
13.
14. enum s3c24xx_i2c_state state;
15. unsigned long clkrate;
16.
17. void __iomem *regs;
18. struct clk *clk;
19. struct device *dev;
20. struct resource *ioarea;
21. struct i2c_adapter adap;
22.
23. #ifdef CONFIG_CPU_FREQ
24. struct notifier_block freq_transition;
25. #endif
26. };
5.s3c2440 I2C 总线通信方法
由代码清单25的23行可以看出,I2C适配器对应的i2c_algorithm结构体实例为s3c24xx_i2c_algorithm,代码清单28所示为s3c24xx_i2c_algorithm的定义。
代码清单28 s3c2440的i2c_algorithm结构体
1. /* i2c bus registration info */
2.
3. static const struct i2c_algorithm s3c24xx_i2c_algorithm = {
4. .master_xfer = s3c24xx_i2c_xfer,
5. .functionality = s3c24xx_i2c_func,
6. };
上述代码第一行指定了s3c2440 I2C总线通信传输函数s3c24xx_i2c_xfer(),这个函数非常关键,所有I2C总线上对设备的访问最终应该由它来完成,代码清单29所示为这个重要函数以及其依赖的s3c24xx_i2c_doxfer()函数和s3c24xx_i2c_message_start()函数的源代码。
代码清单29 s3c2440 I2C总线驱动的master_xfer函数
1. /* s3c24xx_i2c_xfer
2. *
3. * first port of call from the i2c bus code when an message needs
4. * transferring across the i2c bus.
5. */
6.
7. static int s3c24xx_i2c_xfer(struct i2c_adapter *adap,
8. struct i2c_msg *msgs, int num)
9. {
10. struct s3c24xx_i2c *i2c = (struct s3c24xx_i2c *)adap->algo_data;
11. int retry;
12. int ret;
13.
14. clk_enable(i2c->clk);
15.
16. for (retry = 0; retry < adap->retries; retry++) {
17.
18. ret = s3c24xx_i2c_doxfer(i2c, msgs, num);
19.
20. if (ret != -EAGAIN) {
21. clk_disable(i2c->clk);
22. return ret;
23. }
24.
25. dev_dbg(i2c->dev, "Retrying transmission (%d)\n", retry);
26.
27. udelay(100);
28. }
29.
30. clk_disable(i2c->clk);
31. return -EREMOTEIO;
32. }
s3c24xx_i2c_xfer()函数调用s3c24xx_i2c_doxfer()函数传输I2C消息,第13行的循环意味着最多可以重试adap->retres次。
代码清单30 s3c24xx_i2c_doxfer()函数
1. /* s3c24xx_i2c_doxfer
2. *
3. * this starts an i2c transfer
4. */
5.
6. static int s3c24xx_i2c_doxfer(struct s3c24xx_i2c *i2c,
7. struct i2c_msg *msgs, int num)
8. {
9. unsigned long iicstat, timeout;
10. int spins = 20;
11. int ret;
12.
13. if (i2c->suspended)
14. return -EIO;
15.
16. ret = s3c24xx_i2c_set_master(i2c);
17. if (ret != 0) {
18. dev_err(i2c->dev, "cannot get bus (error %d)\n", ret);
19. ret = -EAGAIN;
20. goto out;
21. }
22.
23. spin_lock_irq(&i2c->lock);
24.
25. i2c->msg = msgs;
26. i2c->msg_num = num;
27. i2c->msg_ptr = 0;
28. i2c->msg_idx = 0;
29. i2c->state = STATE_START;
30.
31. s3c24xx_i2c_enable_irq(i2c);
32. s3c24xx_i2c_message_start(i2c, msgs);
33. spin_unlock_irq(&i2c->lock);
34.
35. timeout = wait_event_timeout(i2c->wait, i2c->msg_num == 0, HZ * 5);
36.
37. ret = i2c->msg_idx;
38.
39. /* having these next two as dev_err() makes life very
40. * noisy when doing an i2cdetect */
41.
42. if (timeout == 0)
43. dev_dbg(i2c->dev, "timeout\n");
44. else if (ret != num)
45. dev_dbg(i2c->dev, "incomplete xfer (%d)\n", ret);
46.
47. /* ensure the stop has been through the bus */
48.
49. dev_dbg(i2c->dev, "waiting for bus idle\n");
50.
51. /* first, try busy waiting briefly */
52. do {
53. iicstat = readl(i2c->regs + S3C2410_IICSTAT);
54. } while ((iicstat & S3C2410_IICSTAT_START) && --spins);
55.
56. /* if that timed out sleep */
57. if (!spins) {
58. msleep(1);
59. iicstat = readl(i2c->regs + S3C2410_IICSTAT);
60. }
61.
62. if (iicstat & S3C2410_IICSTAT_START)
63. dev_warn(i2c->dev, "timeout waiting for bus idle\n");
64.
65. out:
66. return ret;
67. }
s3c24xx_i2c_doxfer()首先将s3c2440的I2C适配器设置为I2C主设备,其后初始化s3c24xx_i2c结构体,使能I2C中断,并调用s3c24xx_i2c_message_start()函数启动I2C消息的传输。
代码清单31 s3c24xx_i2c_message_start()函数
1. /* s3c24xx_i2c_message_start
2. *
3. * put the start of a message onto the bus
4. */
5.
6. static void s3c24xx_i2c_message_start(struct s3c24xx_i2c *i2c,
7. struct i2c_msg *msg)
8. {
9. unsigned int addr = (msg->addr & 0x7f) << 1;
10. unsigned long stat;
11. unsigned long iiccon;
12.
13. stat = 0;
14. stat |= S3C2410_IICSTAT_TXRXEN;
15.
16. if (msg->flags & I2C_M_RD) {
17. stat |= S3C2410_IICSTAT_MASTER_RX;
18. addr |= 1;
19. } else
20. stat |= S3C2410_IICSTAT_MASTER_TX;
21.
22. if (msg->flags & I2C_M_REV_DIR_ADDR)
23. addr ^= 1;
24.
25. /* todo - check for wether ack wanted or not */
26. s3c24xx_i2c_enable_ack(i2c);
27.
28. iiccon = readl(i2c->regs + S3C2410_IICCON);
29. writel(stat, i2c->regs + S3C2410_IICSTAT);
30.
31. dev_dbg(i2c->dev, "START: %08lx to IICSTAT, %02x to DS\n", stat, addr);
32. writeb(addr, i2c->regs + S3C2410_IICDS);
33.
34. /* delay here to ensure the data byte has gotten onto the bus
35. * before the transaction is started */
36.
37. ndelay(i2c->tx_setup);
38. dev_dbg(i2c->dev, "iiccon, %08lx\n", iiccon);
39. writel(iiccon, i2c->regs + S3C2410_IICCON);
40.
41. stat |= S3C2410_IICSTAT_START;
42. writel(stat, i2c->regs + S3C2410_IICSTAT);
43. }
s3c24xx_i2c_message_start()函数写s3c2440适配器对应的控制寄存器,向I2C从设备传递开始位和从设备地址。
上述代码只是启动了I2C消息数组的传输周期,并没有完整实现algorithm master_xfer时序的流程。这个流程的完整实现需要借助I2C适配器上的中断来步步推进。代码清单32所示为s3c2440 I2C适配器中断处理函数以及其依赖的i2c_s3c_irq_nextbyte()函数的源码。
代码清单32 s3c2440 I2C适配器中断处理函数
1. /* i2c_s3c_irq_nextbyte
2. *
3. * process an interrupt and work out what to do
4. */
5.
6. static int i2c_s3c_irq_nextbyte(struct s3c24xx_i2c *i2c, unsigned long iicstat)
7. {
8. unsigned long tmp;
9. unsigned char byte;
10. int ret = 0;
11.
12. switch (i2c->state) {
13.
14. case STATE_IDLE:
15. dev_err(i2c->dev, "%s: called in STATE_IDLE\n", __func__);
16. goto out;
17.
18. case STATE_STOP:
19. dev_err(i2c->dev, "%s: called in STATE_STOP\n", __func__);
20. s3c24xx_i2c_disable_irq(i2c);
21. goto out_ack;
22.
23. case STATE_START:
24. /* last thing we did was send a start condition on the
25. * bus, or started a new i2c message
26. */
27.
28. if (iicstat & S3C2410_IICSTAT_LASTBIT &&
29. !(i2c->msg->flags & I2C_M_IGNORE_NAK)) {
30. /* ack was not received... */
31.
32. dev_dbg(i2c->dev, "ack was not received\n");
33. s3c24xx_i2c_stop(i2c, -ENXIO);
34. goto out_ack;
35. }
36.
37. if (i2c->msg->flags & I2C_M_RD)
38. i2c->state = STATE_READ;
39. else
40. i2c->state = STATE_WRITE;
41.
42. /* terminate the transfer if there is nothing to do
43. * as this is used by the i2c probe to find devices. */
44.
45. if (is_lastmsg(i2c) && i2c->msg->len == 0) {
46. s3c24xx_i2c_stop(i2c, 0);
47. goto out_ack;
48. }
49.
50. if (i2c->state == STATE_READ)
51. goto prepare_read;
52.
53. /* fall through to the write state, as we will need to
54. * send a byte as well */
55.
56. case STATE_WRITE:
57. /* we are writing data to the device... check for the
58. * end of the message, and if so, work out what to do
59. */
60.
61. if (!(i2c->msg->flags & I2C_M_IGNORE_NAK)) {
62. if (iicstat & S3C2410_IICSTAT_LASTBIT) {
63. dev_dbg(i2c->dev, "WRITE: No Ack\n");
64.
65. s3c24xx_i2c_stop(i2c, -ECONNREFUSED);
66. goto out_ack;
67. }
68. }
69.
70. retry_write:
71.
72. if (!is_msgend(i2c)) {
73. byte = i2c->msg->buf[i2c->msg_ptr++];
74. writeb(byte, i2c->regs + S3C2410_IICDS);
75.
76. /* delay after writing the byte to allow the
77. * data setup time on the bus, as writing the
78. * data to the register causes the first bit
79. * to appear on SDA, and SCL will change as
80. * soon as the interrupt is acknowledged */
81.
82. ndelay(i2c->tx_setup);
83.
84. } else if (!is_lastmsg(i2c)) {
85. /* we need to go to the next i2c message */
86.
87. dev_dbg(i2c->dev, "WRITE: Next Message\n");
88.
89. i2c->msg_ptr = 0;
90. i2c->msg_idx++;
91. i2c->msg++;
92.
93. /* check to see if we need to do another message */
94. if (i2c->msg->flags & I2C_M_NOSTART) {
95.
96. if (i2c->msg->flags & I2C_M_RD) {
97. /* cannot do this, the controller
98. * forces us to send a new START
99. * when we change direction */
100.
101. s3c24xx_i2c_stop(i2c, -EINVAL);
102. }
103.
104. goto retry_write;
105. } else {
106. /* send the new start */
107. s3c24xx_i2c_message_start(i2c, i2c->msg);
108. i2c->state = STATE_START;
109. }
110.
111. } else {
112. /* send stop */
113.
114. s3c24xx_i2c_stop(i2c, 0);
115. }
116. break;
117.
118. case STATE_READ:
119. /* we have a byte of data in the data register, do
120. * something with it, and then work out wether we are
121. * going to do any more read/write
122. */
123.
124. byte = readb(i2c->regs + S3C2410_IICDS);
125. i2c->msg->buf[i2c->msg_ptr++] = byte;
126.
127. prepare_read:
128. if (is_msglast(i2c)) {
129. /* last byte of buffer */
130.
131. if (is_lastmsg(i2c))
132. s3c24xx_i2c_disable_ack(i2c);
133.
134. } else if (is_msgend(i2c)) {
135. /* ok, we've read the entire buffer, see if there
136. * is anything else we need to do */
137.
138. if (is_lastmsg(i2c)) {
139. /* last message, send stop and complete */
140. dev_dbg(i2c->dev, "READ: Send Stop\n");
141.
142. s3c24xx_i2c_stop(i2c, 0);
143. } else {
144. /* go to the next transfer */
145. dev_dbg(i2c->dev, "READ: Next Transfer\n");
146.
147. i2c->msg_ptr = 0;
148. i2c->msg_idx++;
149. i2c->msg++;
150. }
151. }
152.
153. break;
154. }
155.
156. /* acknowlegde the IRQ and get back on with the work */
157.
158. out_ack:
159. tmp = readl(i2c->regs + S3C2410_IICCON);
160. tmp &= ~S3C2410_IICCON_IRQPEND;
161. writel(tmp, i2c->regs + S3C2410_IICCON);
162. out:
163. return ret;
164. }
中断处理函数s3c24xx_i2c_irq()主要通过调用i2c_s3c_irq_nextbyte()函数进行传输工作的进一步推进。I2c_s3c_irq_nextbyte()函数通过switch(i2c->state)的不同状态进行处理,在每种状态下,先检查i2c->state的状态与硬件寄存器应该处于的状态是否一致,如果不一致,则证明有误,直接返回。当I2C处于读状态STATE_READ或是写状态STATE_WRITE时,通过is_lastmsg()函数判断是否传输的最后一条I2C消息,如果是,则产生停止位,否则通过i2c->msg_idx++、i2c->msg++推进到下一条消息。
四、I2C的第三部分
1.Linux I2C 设备驱动
I2C设备驱动要使用i2c_driver和i2c_client数据结构并填充i2c_driver中的成员函数。I2c_client一般被包含在设备的私有信息结构体yyy_data中,而i2c_driver则适合被定义为全局变量并初始化,代码清单33所示为已被初始化的i2c_driver。
代码清单33 已被初始化的i2c_driver
1. static struct i2c_driver yyy_driver= {
2. .driver = {
3. .name = “yyy”,
4. },
5. .probe = yyy_probe,
6. .remove = yyy_remove,
7. .id_table = yyy_id,
8. };
2.Linux I2C 设备驱动的模块加载与卸载
I2C设备驱动的模块加载函数通用的方法是在I2C设备驱动模块加载函数进行通过I2C核心的i2c_add_driver()函数添加i2c_driver的工作,而在模块卸载函数中需要做相反的工作:通过I2C核心的i2c_del_driver()函数删除i2c_driver。代码清单34所示为I2C设备驱动的加载与卸载函数模板
代码清单34 I2C设备驱动的加载与卸载函数模板
1. Static int __init yyy_init(void)
2. {
3. return i2c_add_driver(&yyy_driver);
4. };
5. void __exit yyy_exit(void)
6. {
7. i2c_del_driver(&yyy_driver);
8. }
3.Linux I2C设备驱动的数据传输
在I2C设备上读写数据的时序和数据通常通过i2c_msg数组组织,最后i2c_transfer()函数完成,代码清单35所示为一个读取指定偏移offs寄存器的例子。
代码清单35 I2C设备驱动数据传输范例
1. struct i2c_msg msg[2];
2. /*第一条消息是写消息*/
3. msg[0].addr = client->addr;
4. msg[0].flags = 0;
5. msg[0].len = 1;
6. msg[0].buf = &offs;
7. /*第二条消息是读消息*/
8. msg[1].addr = client->addr;
9. msg[1].flags = I2C_M_RD;
10. msg[1].len = sizeof(buf);
11. msg[1].buf = &buf[0];
i2c_transfer(client->adapter, msg, 2);
4.Linux的i2c-dev.c文件分析
I2c_dev.c文件完全可以被看作一个I2C设备驱动,不过,它实现的一个i2c_client是虚拟、临时的、随着设备文件的打开而产生,并随着设备文件的关闭而撤销,并没有被添加到i2c_adapter的client链表中。i2c-dev.c针对每个I2C适配器生成一个主设备号为89的设备文件,实现了i2c_driver的成员函数以及文件操作接口,所以i2c-dev.c的主体是“i2c_driver成员函数+字符设备驱动”。
i2c-dev.c中提供i2cdev_read()、i2cdev_write()函数来对应用户空间要使用的read()和write()文件操作接口,这两个函数分别调用I2C核心的i2c_master_recv()和i2c_master_send()函数来构造一条I2C消息并引发适配器algorithm通信函数的调用,完成消息的传输,对应于图所示的时序。但是很遗憾,大多数稍微复杂一点I2C设备的读写流程并不对应于一条消息,往往需要两条甚至跟多的消息来进行一次读写周期(即如图所示的重复开始位RepStart模式),这种情况下,在应用层仍然调用read()、write()文件API来读写I2C设备,将不能正确地读写。许多工程师碰到过类似的问题,往往经过相当长时间的调试都没法解决I2C设备的读写,连错误的原因也无法找到,显然是对i2cdev_read()和i2cdev_write()函数的作用有所误解。

图7 i2cdev_read()和i2cdev_write()函数对应的时序

图8 RepStart模式
鉴于上述的原因,i2c-dev.c中i2cdev_read()和i2cdev_write()函数不具备太强的通用性,没有太大的实用价值,只能实用于非RepStart模式的情况。对于两条以上消息组成的读写,在用户空间需要组织i2c_msg消息数组并调用I2C_RDWRIOCTL命令。代码清单36所示i2cdev_ioctl()函数的框架。
代码清单36 i2c-dev.c中的i2cdev_ioctl函数
1. static long i2cdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
2. {
3. struct i2c_client *client = file->private_data;
4. unsigned long funcs;
5. dev_dbg(&client->adapter->dev, "ioctl, cmd=0x%02x, arg=0x%02lx\n",
6. cmd, arg);
7. switch (cmd) {
8. case I2C_SLAVE:
9. case I2C_SLAVE_FORCE:
10. /* NOTE: devices set up to work with "new style" drivers
11. * can't use I2C_SLAVE, even when the device node is not
12. * bound to a driver. Only I2C_SLAVE_FORCE will work.
13. *
14. * Setting the PEC flag here won't affect kernel drivers,
15. * which will be using the i2c_client node registered with
16. * the driver model core. Likewise, when that client has
17. * the PEC flag already set, the i2c-dev driver won't see
18. * (or use) this setting.
19. */
20. if ((arg > 0x3ff) ||
21. (((client->flags & I2C_M_TEN) == 0) && arg > 0x7f))
22. return -EINVAL;
23. if (cmd == I2C_SLAVE && i2cdev_check_addr(client->adapter, arg))
24. return -EBUSY;
25. /* REVISIT: address could become busy later */
26. client->addr = arg;
27. return 0;
28. case I2C_TENBIT:
29. if (arg)
30. client->flags |= I2C_M_TEN;
31. else
32. client->flags &= ~I2C_M_TEN;
33. return 0;
34. case I2C_PEC:
35. if (arg)
36. client->flags |= I2C_CLIENT_PEC;
37. else
38. client->flags &= ~I2C_CLIENT_PEC;
39. return 0;
40. case I2C_FUNCS:
41. funcs = i2c_get_functionality(client->adapter);
42. return put_user(funcs, (unsigned long __user *)arg);
43. case I2C_RDWR:
44. return i2cdev_ioctl_rdrw(client, arg);
45. case I2C_SMBUS:
46. return i2cdev_ioctl_smbus(client, arg);
47. case I2C_RETRIES:
48. client->adapter->retries = arg;
49. break;
50. case I2C_TIMEOUT:
51. /* For historical reasons, user-space sets the timeout
52. * value in units of 10 ms.
53. */
54. client->adapter->timeout = msecs_to_jiffies(arg * 10);
55. break;
56. default:
57. /* NOTE: returning a fault code here could cause trouble
58. * in buggy userspace code. Some old kernel bugs returned
59. * zero in this case, and userspace code might accidentally
60. * have depended on that bug.
61. */
62. return -ENOTTY;
63. }
64. return 0;
65. }
常用的IOCTL包含I2C_SLAVE(设备从设备地址)、I2C_RETRIES(没有收到设备ACK情况下的重试次数,默认为1)、I2C_TIMEOUT以及I2C_RDWR。
5.AT24C02 EEPROM的I2C设备驱动实例
I2c设备驱动(也称为客户驱动)是对I2c硬件体系结构中设备端的实现,我们这里是AT24C02的I2c设备驱动,设备一般挂接在受CPU控制的I2c适配器上,通过I2c适配器与CPU交换数据。
drivers/misc/eeprom/at24.c文件支持大多数I2C接口的EEPROM,正如我们前面所述,一个具体的I2C设备驱动有两部分组成,一部分是i2c_driver,用于将设备挂接于I2C总线,一部分是设备本身的驱动。对于EEPROM而言,设备本身的驱动以bin_attribute二进制sysfs结点形式呈现。代码清单37给出了该驱动的框架。
代码清单37 at24_bin_read()函数
1. static ssize_t at24_bin_read(struct file *filp, struct kobject *kobj,
2. struct bin_attribute *attr,
3. char *buf, loff_t off, size_t count)
4. {
5. struct at24_data *at24;
6.
7. at24 = dev_get_drvdata(container_of(kobj, struct device, kobj));
8. return at24_read(at24, buf, off, count);
9. }
代码清单38 at24_bin_write()函数
1. /*
2. * Note that if the hardware write-protect pin is pulled high, the whole
3. * chip is normally write protected. But there are plenty of product
4. * variants here, including OTP fuses and partial chip protect.
5. *
6. * We only use page mode writes; the alternative is sloooow. This routine
7. * writes at most one page.
8. */
9. static ssize_t at24_eeprom_write(struct at24_data *at24, const char *buf,
10. unsigned offset, size_t count)
11. {
12. struct i2c_client *client;
13. struct i2c_msg msg;
14. ssize_t status;
15. unsigned long timeout, write_time;
16. unsigned next_page;
17.
18. /* Get corresponding I2C address and adjust offset */
19. client = at24_translate_offset(at24, &offset);
20.
21. /* write_max is at most a page */
22. if (count > at24->write_max)
23. count = at24->write_max;
24.
25. /* Never roll over backwards, to the start of this page */
26. next_page = roundup(offset + 1, at24->chip.page_size);
27. if (offset + count > next_page)
28. count = next_page - offset;
29.
30. /* If we'll use I2C calls for I/O, set up the message */
31. if (!at24->use_smbus) {
32. int i = 0;
33.
34. msg.addr = client->addr;
35. msg.flags = 0;
36.
37. /* msg.buf is u8 and casts will mask the values */
38. msg.buf = at24->writebuf;
39. if (at24->chip.flags & AT24_FLAG_ADDR16)
40. msg.buf[i++] = offset >> 8;
41.
42. msg.buf[i++] = offset;
43. memcpy(&msg.buf[i], buf, count);
44. msg.len = i + count;
45. }
46.
47. /*
48. * Writes fail if the previous one didn't complete yet. We may
49. * loop a few times until this one succeeds, waiting at least
50. * long enough for one entire page write to work.
51. */
52. timeout = jiffies + msecs_to_jiffies(write_timeout);
53. do {
54. write_time = jiffies;
55. if (at24->use_smbus) {
56. status = i2c_smbus_write_i2c_block_data(client,
57. offset, count, buf);
58. if (status == 0)
59. status = count;
60. } else {
61. status = i2c_transfer(client->adapter, &msg, 1);
62. if (status == 1)
63. status = count;
64. }
65. dev_dbg(&client->dev, "write %zu@%d --> %zd (%ld)\n",
66. count, offset, status, jiffies);
67.
68. if (status == count)
69. return count;
70.
71. /* REVISIT: at HZ=100, this is sloooow */
72. msleep(1);
73. } while (time_before(write_time, timeout));
74.
75. return -ETIMEDOUT;
76. }
代码清单39 i2c_device_id结构体
1. static const struct i2c_device_id at24_ids[] = {
2. /* needs 8 addresses as A0-A2 are ignored */
3. { "24c00", AT24_DEVICE_MAGIC(128 / 8, AT24_FLAG_TAKE8ADDR) },
4. /* old variants can't be handled with this generic entry! */
5. { "24c01", AT24_DEVICE_MAGIC(1024 / 8, 0) },
6. { "24c02", AT24_DEVICE_MAGIC(2048 / 8, 0) },
7. /* spd is a 24c02 in memory DIMMs */
8. { "spd", AT24_DEVICE_MAGIC(2048 / 8,
9. AT24_FLAG_READONLY | AT24_FLAG_IRUGO) },
10. { "24c04", AT24_DEVICE_MAGIC(4096 / 8, 0) },
11. /* 24rf08 quirk is handled at i2c-core */
12. { "24c08", AT24_DEVICE_MAGIC(8192 / 8, 0) },
13. { "24c16", AT24_DEVICE_MAGIC(16384 / 8, 0) },
14. { "24c32", AT24_DEVICE_MAGIC(32768 / 8, AT24_FLAG_ADDR16) },
15. { "24c64", AT24_DEVICE_MAGIC(65536 / 8, AT24_FLAG_ADDR16) },
16. { "24c128", AT24_DEVICE_MAGIC(131072 / 8, AT24_FLAG_ADDR16) },
17. { "24c256", AT24_DEVICE_MAGIC(262144 / 8, AT24_FLAG_ADDR16) },
18. { "24c512", AT24_DEVICE_MAGIC(524288 / 8, AT24_FLAG_ADDR16) },
19. { "24c1024", AT24_DEVICE_MAGIC(1048576 / 8, AT24_FLAG_ADDR16) },
20. { "at24", 0 },
21. { /* END OF LIST */ }
22. };
23. MODULE_DEVICE_TABLE(i2c, at24_ids);
代码清单40 初始化at24xx设备的i2c_driver结构体
1. /*-------------------------------------------------------------------------*/
2.
3. static struct i2c_driver at24_driver = {
4. .driver = {
5. .name = "at24",
6. .owner = THIS_MODULE,
7. },
8. .probe = at24_probe,
9. .remove = __devexit_p(at24_remove),
10. .id_table = at24_ids,
11. };
代码清单41 at24_probe函数
1. static int at24_probe(struct i2c_client *client, const struct i2c_device_id *id)
2. {
3. struct at24_platform_data chip;
4. bool writable;
5. int use_smbus = 0;
6. struct at24_data *at24;
7. int err;
8. unsigned i, num_addresses;
9. kernel_ulong_t magic;
10.
11. if (client->dev.platform_data) {
12. chip = *(struct at24_platform_data *)client->dev.platform_data;
13. } else {
14. if (!id->driver_data) {
15. err = -ENODEV;
16. goto err_out;
17. }
18. magic = id->driver_data;
19. chip.byte_len = BIT(magic & AT24_BITMASK(AT24_SIZE_BYTELEN));
20. magic >>= AT24_SIZE_BYTELEN;
21. chip.flags = magic & AT24_BITMASK(AT24_SIZE_FLAGS);
22. /*
23. * This is slow, but we can't know all eeproms, so we better
24. * play safe. Specifying custom eeprom-types via platform_data
25. * is recommended anyhow.
26. */
27. chip.page_size = 1;
28.
29. /* update chipdata if OF is present */
30. at24_get_ofdata(client, &chip);
31.
32. chip.setup = NULL;
33. chip.context = NULL;
34. }
35.
36. if (!is_power_of_2(chip.byte_len))
37. dev_warn(&client->dev,
38. "byte_len looks suspicious (no power of 2)!\n");
39. if (!chip.page_size) {
40. dev_err(&client->dev, "page_size must not be 0!\n");
41. err = -EINVAL;
42. goto err_out;
43. }
44. if (!is_power_of_2(chip.page_size))
45. dev_warn(&client->dev,
46. "page_size looks suspicious (no power of 2)!\n");
47.
48. /* Use I2C operations unless we're stuck with SMBus extensions. */
49. if (!i2c_check_functionality(client->adapter, I2C_FUNC_I2C)) {
50. if (chip.flags & AT24_FLAG_ADDR16) {
51. err = -EPFNOSUPPORT;
52. goto err_out;
53. }
54. if (i2c_check_functionality(client->adapter,
55. I2C_FUNC_SMBUS_READ_I2C_BLOCK)) {
56. use_smbus = I2C_SMBUS_I2C_BLOCK_DATA;
57. } else if (i2c_check_functionality(client->adapter,
58. I2C_FUNC_SMBUS_READ_WORD_DATA)) {
59. use_smbus = I2C_SMBUS_WORD_DATA;
60. } else if (i2c_check_functionality(client->adapter,
61. I2C_FUNC_SMBUS_READ_BYTE_DATA)) {
62. use_smbus = I2C_SMBUS_BYTE_DATA;
63. } else {
64. err = -EPFNOSUPPORT;
65. goto err_out;
66. }
67. }
68.
69. if (chip.flags & AT24_FLAG_TAKE8ADDR)
70. num_addresses = 8;
71. else
72. num_addresses = DIV_ROUND_UP(chip.byte_len,
73. (chip.flags & AT24_FLAG_ADDR16) ? 65536 : 256);
74.
75. at24 = kzalloc(sizeof(struct at24_data) +
76. num_addresses * sizeof(struct i2c_client *), GFP_KERNEL);
77. if (!at24) {
78. err = -ENOMEM;
79. goto err_out;
80. }
81.
82. mutex_init(&at24->lock);
83. at24->use_smbus = use_smbus;
84. at24->chip = chip;
85. at24->num_addresses = num_addresses;
86.
87. /*
88. * Export the EEPROM bytes through sysfs, since that's convenient.
89. * By default, only root should see the data (maybe passwords etc)
90. */
91. sysfs_bin_attr_init(&at24->bin);
92. at24->bin.attr.name = "eeprom";
93. at24->bin.attr.mode = chip.flags & AT24_FLAG_IRUGO ? S_IRUGO : S_IRUSR;
94. at24->bin.read = at24_bin_read;
95. at24->bin.size = chip.byte_len;
96.
97. at24->macc.read = at24_macc_read;
98.
99. writable = !(chip.flags & AT24_FLAG_READONLY);
100. if (writable) {
101. if (!use_smbus || i2c_check_functionality(client->adapter,
102. I2C_FUNC_SMBUS_WRITE_I2C_BLOCK)) {
103.
104. unsigned write_max = chip.page_size;
105.
106. at24->macc.write = at24_macc_write;
107.
108. at24->bin.write = at24_bin_write;
109. at24->bin.attr.mode |= S_IWUSR;
110.
111. if (write_max > io_limit)
112. write_max = io_limit;
113. if (use_smbus && write_max > I2C_SMBUS_BLOCK_MAX)
114. write_max = I2C_SMBUS_BLOCK_MAX;
115. at24->write_max = write_max;
116.
117. /* buffer (data + address at the beginning) */
118. at24->writebuf = kmalloc(write_max + 2, GFP_KERNEL);
119. if (!at24->writebuf) {
120. err = -ENOMEM;
121. goto err_struct;
122. }
123. } else {
124. dev_warn(&client->dev,
125. "cannot write due to controller restrictions.");
126. }
127. }
128.
129. at24->client[0] = client;
130.
131. /* use dummy devices for multiple-address chips */
132. for (i = 1; i < num_addresses; i++) {
133. at24->client[i] = i2c_new_dummy(client->adapter,
134. client->addr + i);
135. if (!at24->client[i]) {
136. dev_err(&client->dev, "address 0x%02x unavailable\n",
137. client->addr + i);
138. err = -EADDRINUSE;
139. goto err_clients;
140. }
141. }
142. err = sysfs_create_bin_file(&client->dev.kobj, &at24->bin);
143. if (err)
144. goto err_clients;
145.
146. i2c_set_clientdata(client, at24);
147.
148. dev_info(&client->dev, "%zu byte %s EEPROM, %s, %u bytes/write\n",
149. at24->bin.size, client->name,
150. writable ? "writable" : "read-only", at24->write_max);
151. if (use_smbus == I2C_SMBUS_WORD_DATA ||
152. use_smbus == I2C_SMBUS_BYTE_DATA) {
153. dev_notice(&client->dev, "Falling back to %s reads, "
154. "performance will suffer\n", use_smbus ==
155. I2C_SMBUS_WORD_DATA ? "word" : "byte");
156. }
157.
158. /* export data to kernel code */
159. if (chip.setup)
160. chip.setup(&at24->macc, chip.context);
161.
162. return 0;
163.
164. err_clients:
165. for (i = 1; i < num_addresses; i++)
166. if (at24->client[i])
167. i2c_unregister_device(at24->client[i]);
168.
169. kfree(at24->writebuf);
170. err_struct:
171. kfree(at24);
172. err_out:
173. dev_dbg(&client->dev, "probe error %d\n", err);
174. return err;
175. }
176.
177. 代码清单42 at24_remove函数
178. static int __devexit at24_remove(struct i2c_client *client)
179. {
180. struct at24_data *at24;
181. int i;
182.
183. at24 = i2c_get_clientdata(client);
184. sysfs_remove_bin_file(&client->dev.kobj, &at24->bin);
185.
186. for (i = 1; i < at24->num_addresses; i++)
187. i2c_unregister_device(at24->client[i]);
188.
189. kfree(at24->writebuf);
190. kfree(at24);
191. return 0;
192. }
代码清单43 at24xx设备驱动模块的加载和卸载函数
1. static int __init at24_init(void)
2. {
3. if (!io_limit) {
4. pr_err("at24: io_limit must not be 0!\n");
5. return -EINVAL;
6. }
7.
8. io_limit = rounddown_pow_of_two(io_limit);
9. return i2c_add_driver(&at24_driver);
10. }
11. module_init(at24_init);
12.
13. static void __exit at24_exit(void)
14. {
15. i2c_del_driver(&at24_driver);
16. }
17. module_exit(at24_exit);
18.
19. MODULE_DESCRIPTION("Driver for most I2C EEPROMs");
20. MODULE_AUTHOR("David Brownell and Wolfram Sang");
21. MODULE_LICENSE("GPL");
At24_bin_read()和at24_bin_write()俩个函数是EEPROM驱动本身的读写实现即bin_attribute驱动,之后一部分是i2c_driver,两者在i2c_driver的probe()、remove函数中建立关联。I2c_driver的probe()函数中的初始化并通过sysfs_create_bin_file()注册了二进制sysfs结点,而remove()函数则通过sysfs_remove_bin_file()注销了sysfs结点。
6.添加板级信息
drivers/misc/eeprom/at24.c不依赖于具体的CPU和I2C控制寄存器硬件特性,因此,如果某一电路板包含该外设,只需要在板文件中添加对应的i2c_board_info,如对于s3c2440要使其支持at24c02 eeprom只需要作如下工作:
首先是要在内核中注册板级信息,因为设备和驱动需要匹配,它们是通过设备名和驱动名进行匹配的。因为AT24C02芯片是由2048bits构成,所以有2048 / 8 = 256byte,并将其分成32页每页有8byte大小,是8bits寻址,如果AT24C02芯片的A0,A1,A2,这三个引脚接地,着AT24C02芯片从地址是01010000b(即0x50),如果AT24C02芯片的A0结高电平,A1,A2两个引脚接地,着AT24C02芯片从地址是01010001b(即0x51),这些都是AT24C02的datasheet上有的,不同芯片不同情况。下面在linux-3.0/arch/arm/mach-s3c2440/mach-smdk2440.c添加AT24C02设备的板级信息如下:
1. [fulinux@ubuntu linux-3.0]$ vim arch/arm/mach-s3c2440/mach-smdk2440.c
2. #include <linux/i2c.h>
3. #include <linux/i2c/at24.h>
4.
5. static struct at24_platform_data at24c02= {
6. .byte_len = SZ_2K / 8,
7. .page_size = 8,
8. .flags = AT24_FLAG_ADDR8,
9. };
10.
11. static struct i2c_board_info __initdata smdk2440_i2c_devs[] = {
12. {
13. I2C_BOARD_INFO("24c02", 0x50),
14. .platform_data = &at24c02,
15. },
16. /* more devices can be added using expansion connectors */
17. };
********************************************************************************************
装载声明:希望大家能转载此文谢谢:原文链接















 472
472

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









