









简介
Dlib库是一个基于C++开发的机器学习算法的工具库,广泛应用在机器人、嵌入式设备、移动手机和高性能计算设备中,以用于解决实际问题。
下面给出Dlib库的官网连接:
由于最近打算在VS平台上实现fhog特征,发现该库含有该特征,故打算安装试试效果。
安装步骤
1.解压Dlib
1.首先将Dlib-19.2下载到D盘中(其他盘亦可)。
2.解压放置在D盘目录下。
2.使用CMake制作Dlib.lib
解压得到的文件不包含lib文件,需要用CMake制作出来,建立一个空的build文件夹作为输出文件夹。
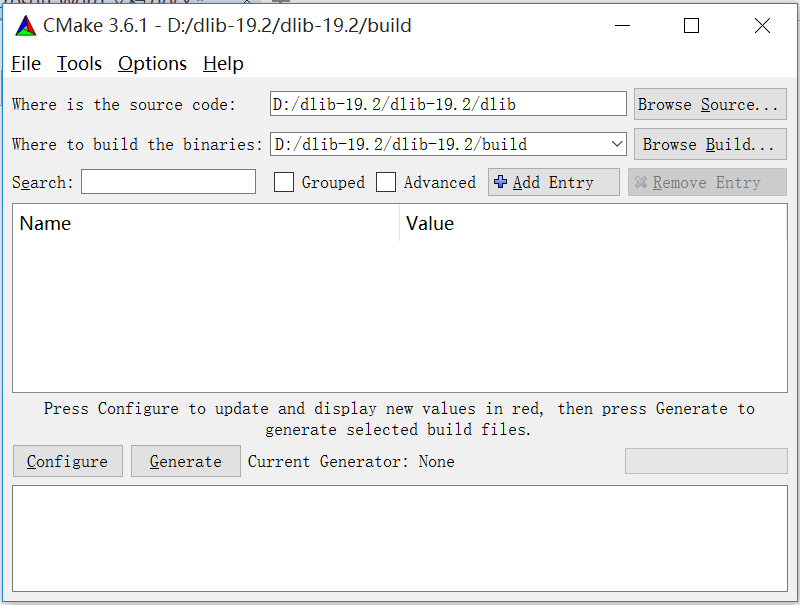
点击Generate,选择对应的VS版本,19.2只支持VS2015,故选择VS2015 ,使用默认Compliers。
点击finish,最后编译完成
提醒:它会报一个跟CUDA相关的错误,不用管它,我猜测是关于深度学习的应用,我电脑没有安装深度学习相关的东西所以就没理这个错误,最后结果表明确实这个错误不影响使用。
3.VS2015添加DLib库
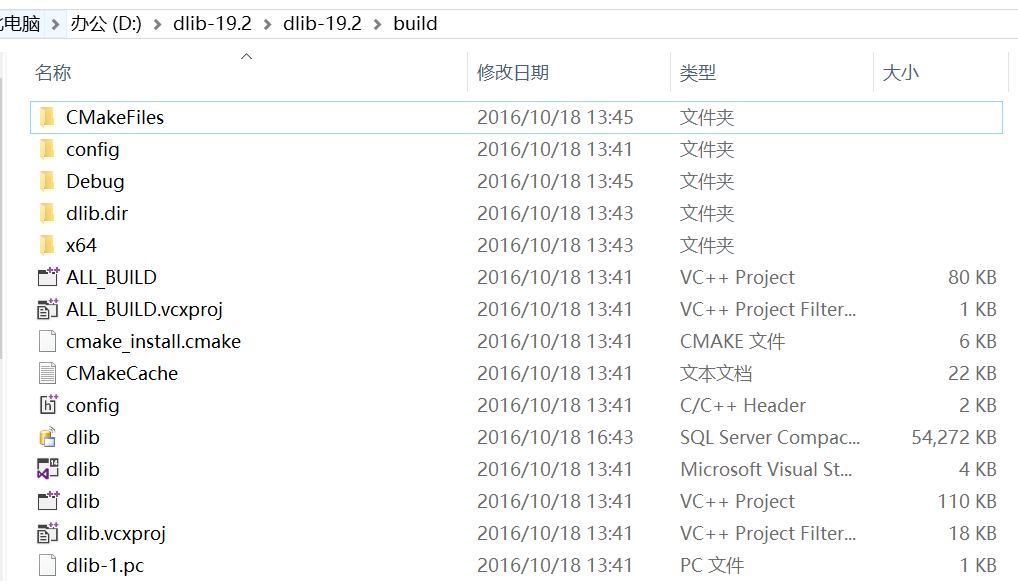
编译完成后在build里出现一个dlib工程项目,用VS2015打开dlib.sln。
生成解决方案得到debug文件夹,里面既是所需要的dlib。
Note:dlib中加入DLIB_JPEG _SUPPORT方可读入jpg格式的图像
项目:
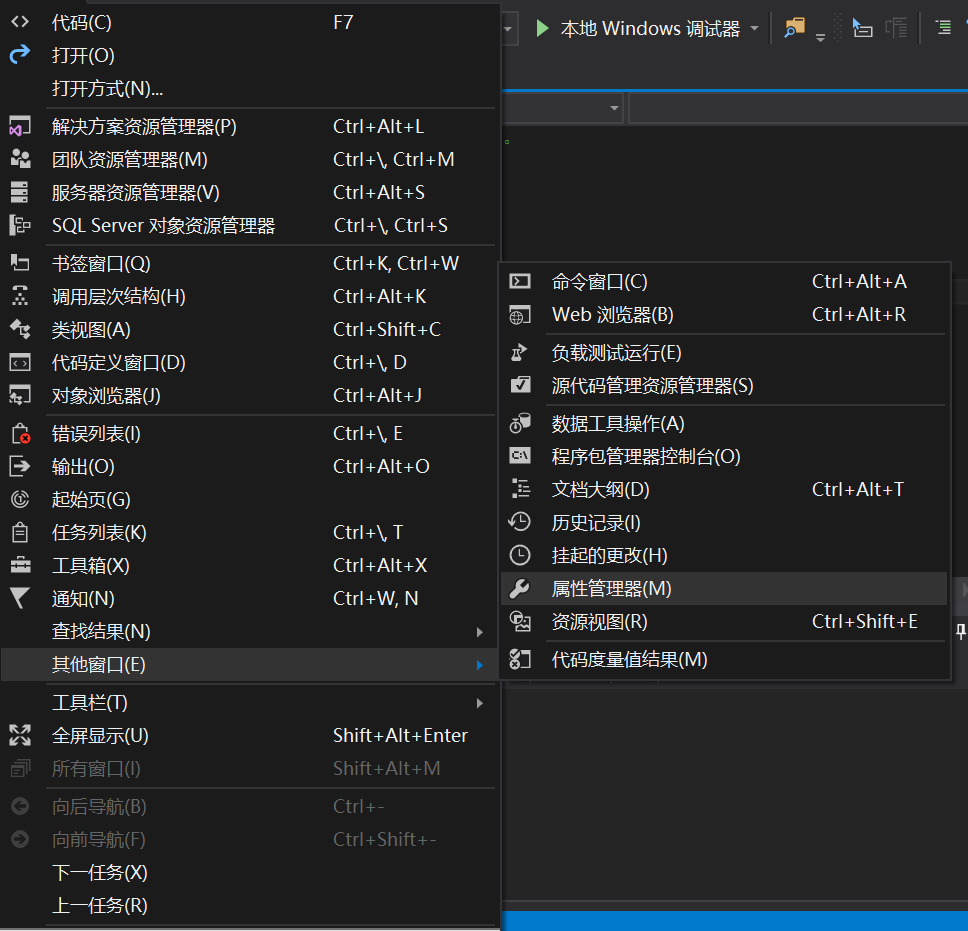
接着在VS2015中添加DLib附加库,随便新建一个Win32控制台程序,为保证对所有工程都有效,在属性管理器里进行全局更改。
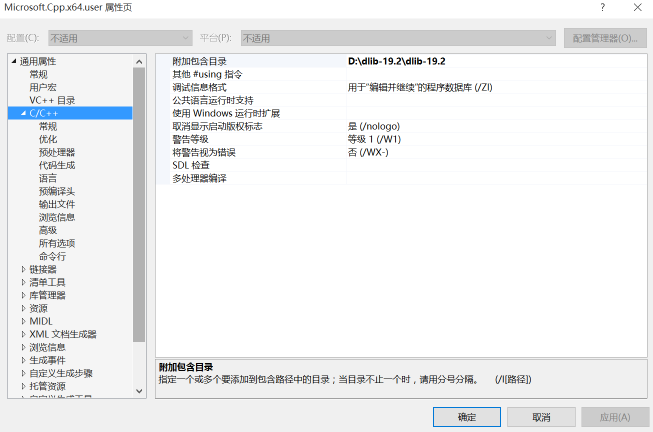
双击Microsoft.Cpp.x64.user弹出属性页,在链接器-常规里添加附加包含目录(注意路径名字)
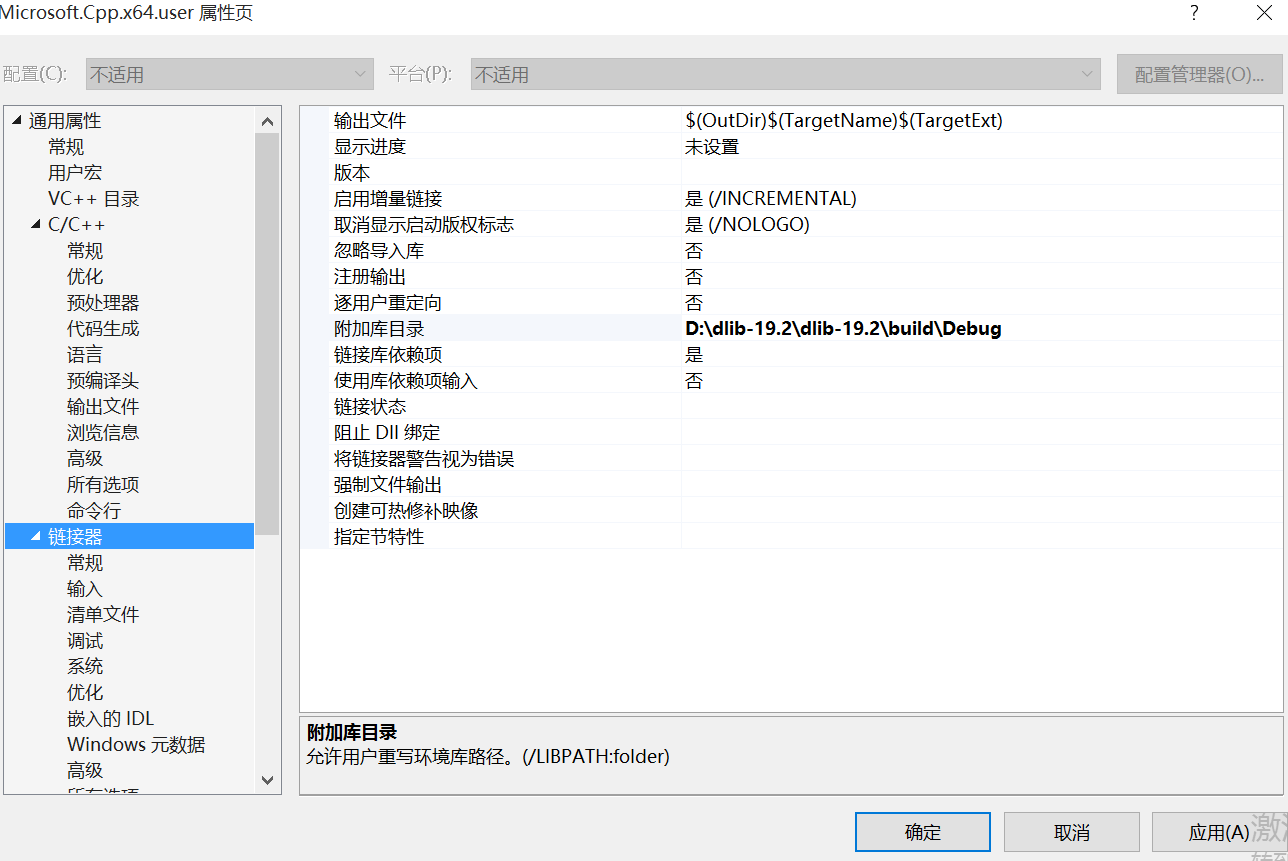
然后附加库目录
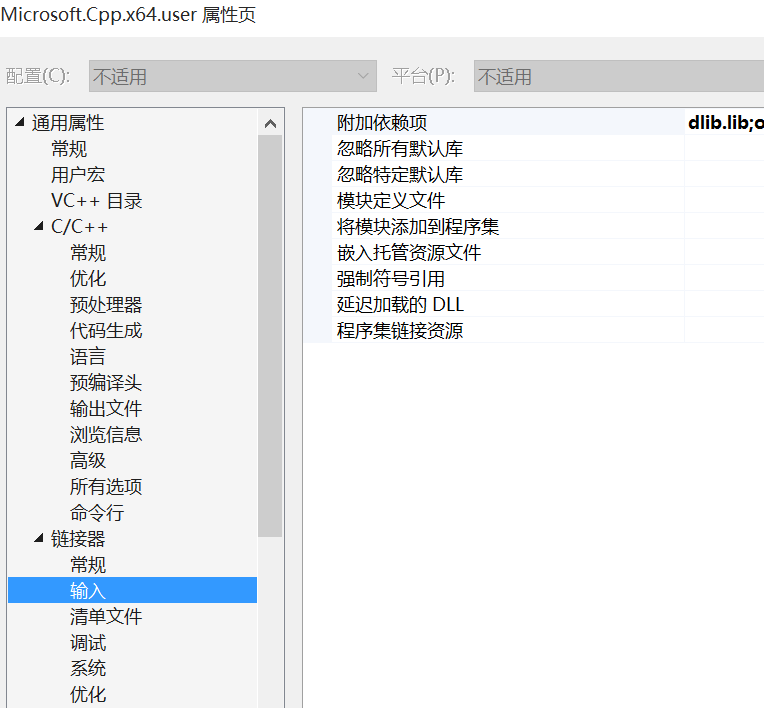
以及附加依赖项
以上就是dlib的库添加过程。上述包含目录和附加库目录添加过程也可在VC++目录完成。
自己的项目时还需在包括头文件前加上#define DLIB_JPEG_SUPPORT 或 在该项目的预处理器中加入DLIB_JPEG_SUPPORT
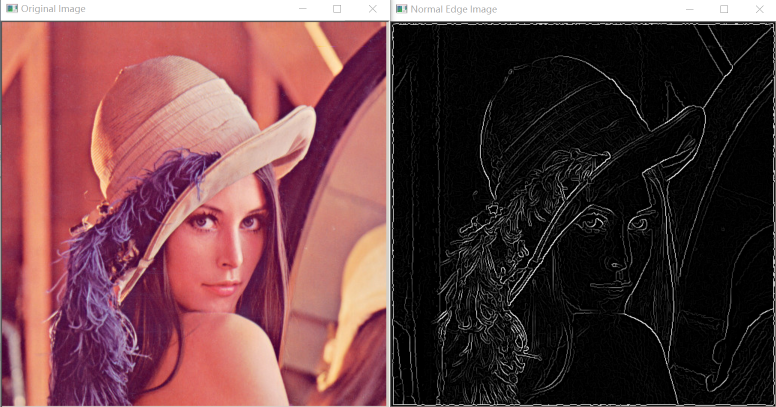
4.示例测试
最后写个程序来测试是否成功,程序为一个简单的Canny边缘检测示例程序,是examples里的示例程序。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80















 3365
3365











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









