









转载:http://blog.csdn.net/shoreman/article/details/11018191
RANSAC范例的正式描述如下:
首先,要给定:
1一个模型,该模型需要最少n个数据点去实例化它的自由参数;
2一组数据点P,P中包含数据点的数量#(P)大于n。
然后,
从P中随机地选择n个点(组成P的一个子集S1)并实例化这个模型(构造成M1)。
接下来,
利用实例化的模型M1去测定P中点的某个子集S1*,这些点相对于M1的错误被限制在一个给定的阈值下,其中S1*被称作S1的一致性集合。
或者:
利用实例化的模型M1去逐个测定P中的其它点,舍掉那些偏离M1较大的点,保留那些偏离M1较小的点并组成一个集合S1*,该集合被称作S1的一致性集合。
接下来的步骤要对S1*中点的数量#(S1*)进行条件判定:
if( #(S1*) >= t ) // t是一个阈值,是P中离群点(相对于M1)数量的估计函数
{
利用S1*(+S1)去计算一个新的模型M1*;// 例如用最小二乘法
}
if( #(S1*) < t )
{
随机地选择一个新的子集S2,并重复以上过程;
如果,
在几次预定义的实验次数之后,找到的一致性集合含有点的数量总是小于t;
那么,
要么使用已经找到的最大的一致性集合去解决这个模型;
要么以失败来终结掉这个算法。
}
代码
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
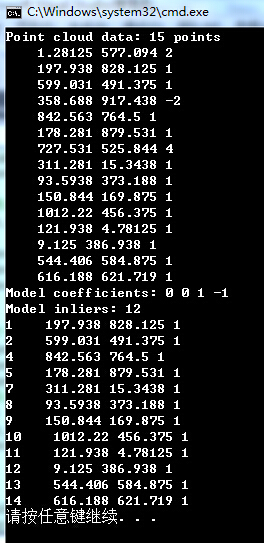
运行结果















 182
182

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









