










OpenCV实现影像畸变矫正GPU
OpenCV实现影像矫正使用的是
initUndistortRectifyMap()计算畸变的映射
remap()计算映射,其详解见:OpenCV函数remap详解
注:k1,k2,p1,p2,k3的顺序
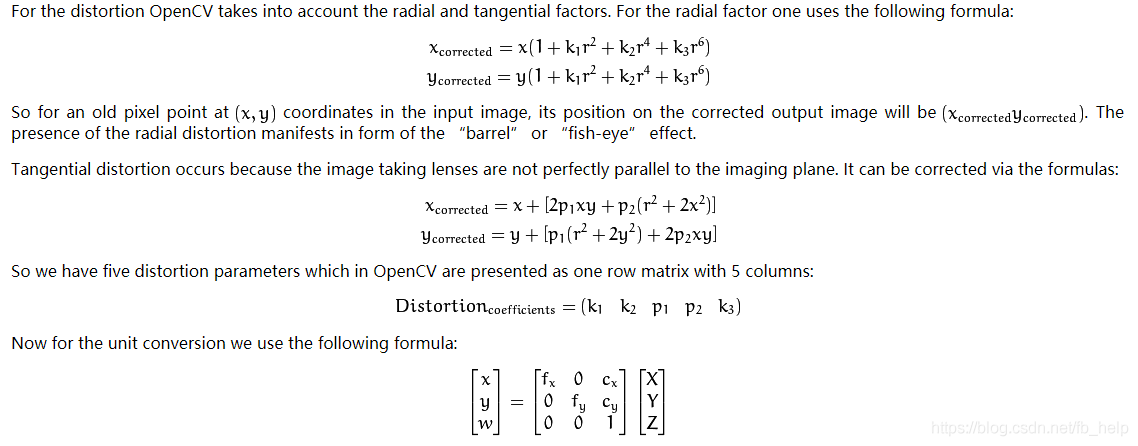
只能纠正不考虑skew扭曲参数的情况。
Mat src_cpu = imread(in_filename);
cv::cuda::GpuMat src(src_cpu);
cv::cuda::GpuMat distortion(src.size(),src.type());
cv::Mat result;
//Mat src = imread(in_filename);
//Mat distortion = src.clone();
Mat camera_matrix = Mat::zeros(3, 3, CV_64FC1);
Mat distortion_coefficients = Mat::zeros(1,5,CV_64FC1);
cv::Size imageSize = src.size();
camera_matrix.at<double>(0, 0) = f;
camera_matrix.at<double>(0, 2) = x0;
camera_matrix.at<double>(1, 1) = f;
camera_matrix.at<double>(1, 2) = y0;
camera_matrix.at<double>(2, 2) = 1;
//std::cout << camera_matrix << std::endl;
distortion_coefficients.at<double>(0, 0) = K1;
distortion_coefficients.at<double>(0, 1) = K2;
distortion_coefficients.at<double>(0, 2) = P1;
distortion_coefficients.at<double>(0, 3) = P2;
distortion_coefficients.at<double>(0, 4) = K3;
//矫正
//undistort(src, distortion, camera_matrix, distortion_coefficients);
cv::Mat map1, map2;
initUndistortRectifyMap(
camera_matrix, distortion_coefficients, Mat(),
camera_matrix, imageSize,
CV_32FC1, map1, map2);
::cv::cuda::GpuMat m_mapx;
::cv::cuda::GpuMat m_mapy;
m_mapx = ::cv::cuda::GpuMat(map1);
m_mapy = ::cv::cuda::GpuMat(map2);
::cv::cuda::remap(src, distortion, m_mapx, m_mapy, INTER_LINEAR);
distortion.download(result);
//imshow("img", src);
//imshow("undistort", distortion);
//imwrite("undistort.jpg", distortion);
//imshow("img", src_cpu);
//
//imshow("undistort", result);
//waitKey(0);
imwrite(out_filename, result);














 1599
1599











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









