







ABB机器人的多任务,最多支持10个任务。
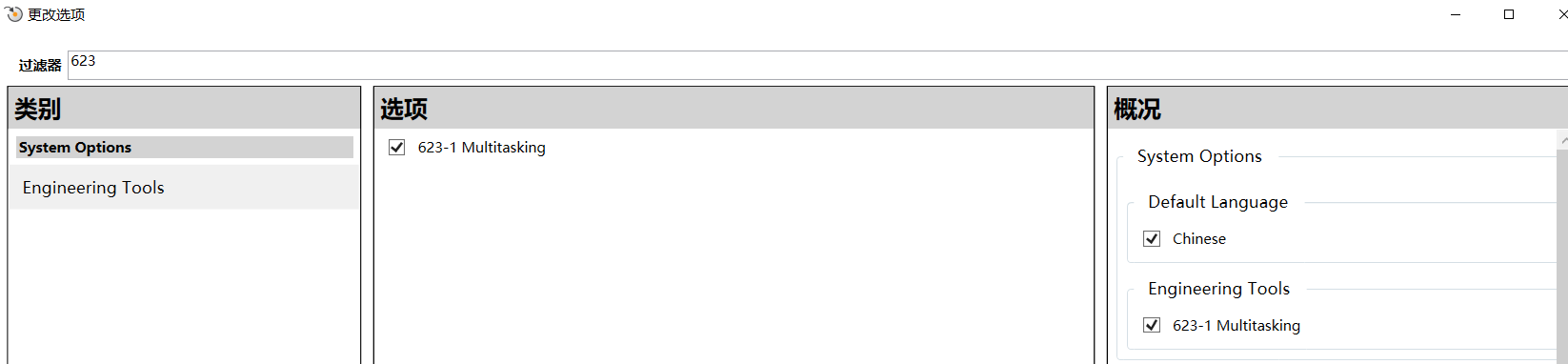
1、要实现多任务编程,首先在配置中必须要增加多任务组件
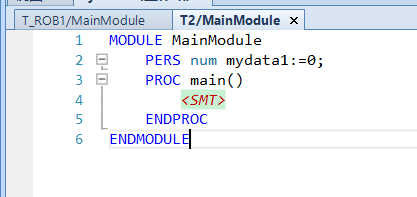
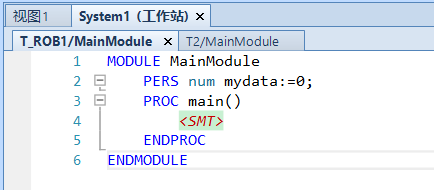
2、多任务之间的通讯,数据交换,在定义变量时,只能是PERS类型。两个任务定义的变量一样。
3、多任务工程建立:
1)、示教器----控制面板-----配置-------主题-----controller

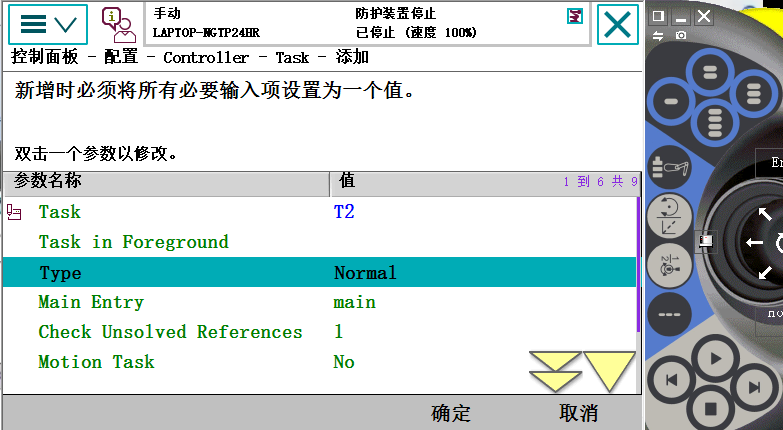
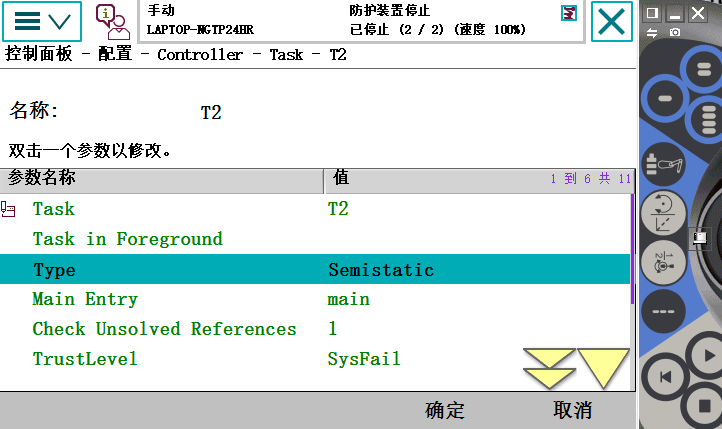
2)、打开Task,看到已经有一个主任务了,不要改动,点击“添加”,新增加一个任务。

定义一个任务名称,如T2,类型一定要先改为Normal。这个任务也有一个main函数,并且不是运动控制任务。
(选择Normal,上电后不会执行T2任务程序,可以进行程序修改,如果选其他2个,上电就开始执行T2任务,无法进行程序修改。)
注意:配置中需要有623-1 Multitasking,否则不能添加
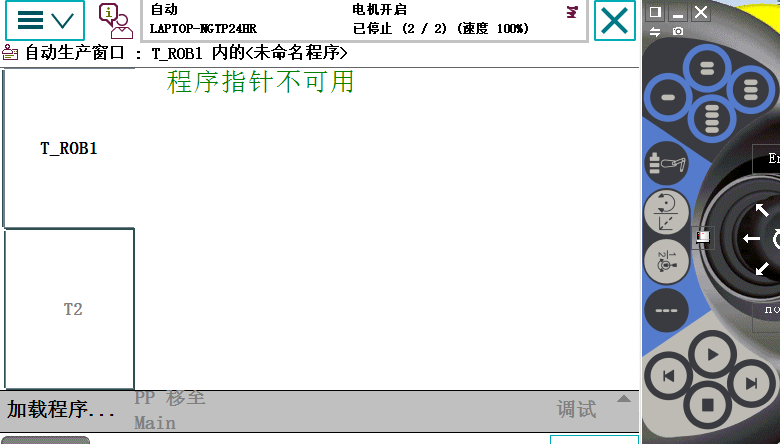
此时重启后就可以看到有2个任务了。
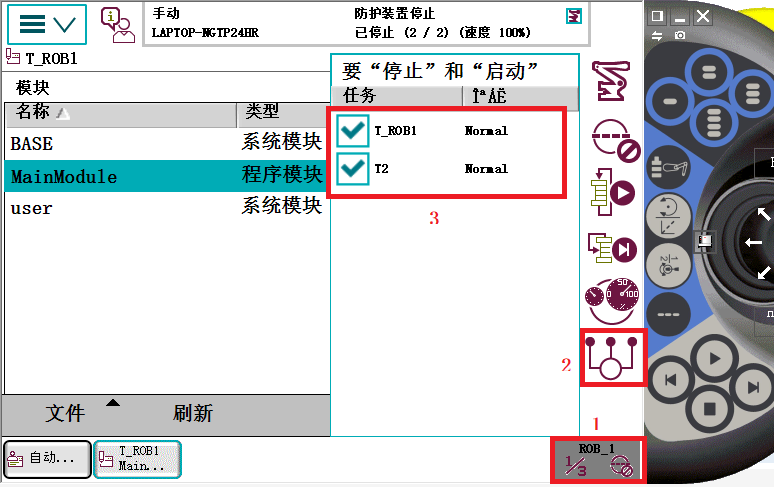
点击示教器配置,可以看到两个任务,勾选哪个,哪个就执行。
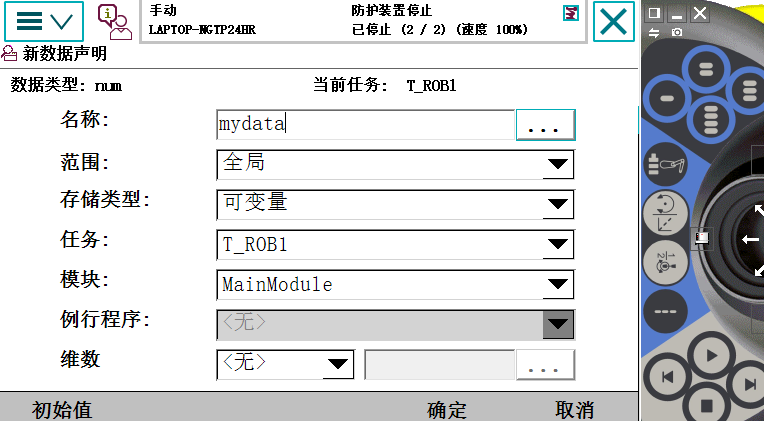
3)创建变量(需要创建2份一样的,分别对应2个任务,变量类型为可变量)
程序数据-------新建

5)、将任务重新设置为上电运行
当其他任务的代码编写好了以后,就可以将任务配置为上电运行状态

















 3672
3672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









