







一. 概述
ALSA是Advanced Linux Sound Architecture 的缩写,目前已经成为了linux的主流音频体系结构,想了解更多的关于ALSA的这一开源项目的信息和知识,请查看以下网址:http://www.alsa-project.org/。
在内核设备驱动层,ALSA提供了alsa-driver,同时在应用层,ALSA为我们提供了alsa-lib,应用程序只要调用alsa-lib提供的API,即可以完成对底层音频硬件的控制。
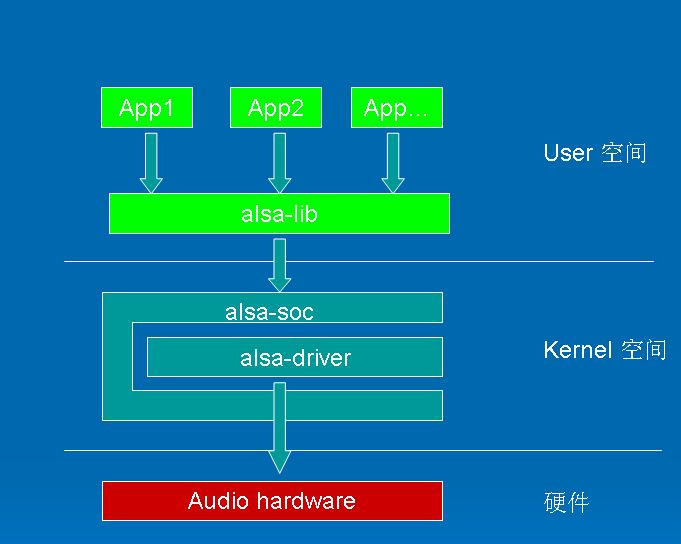
图 1.1 alsa的软件体系结构
由图1.1可以看出,用户空间的alsa-lib对应用程序提供统一的API接口,这样可以隐藏了驱动层的实现细节,简化了应用程序的实现难度。内核空间中,alsa-soc其实是对alsa-driver的进一步封装,他针对嵌入式设备提供了一些列增强的功能。本系列博文仅对嵌入式系统中的alsa-driver和alsa-soc进行讨论。
二. ALSA设备文件结构
我们从alsa在linux中的设备文件结构开始我们的alsa之旅. 看看我的电脑中的alsa驱动的设备文件结构:
$ cd /dev/snd
$ ls -l
crw-rw----+ 1 root audio 116, 8 2011-02-23 21:38 controlC0
crw-rw----+ 1 root audio 116, 4 2011-02-23 21:38 midiC0D0
crw-rw----+ 1 root audio 116, 7 2011-02-23 21:39 pcmC0D0c
crw-rw----+ 1 root audio 116, 6 2011-02-23 21:56 pcmC0D0p
crw-rw----+ 1 root audio 116, 5 2011-02-23 21:38 pcmC0D1p
crw-rw----+ 1 root audio 116, 3 2011-02-23 21:38 seq
crw-rw----+ 1 root audio 116, 2 2011-02-23 21:38 timer
$
我们可以看到以下设备文件:
- controlC0 --> 用于声卡的控制,例如通道选择,混音,麦克风的控制等
- midiC0D0 --> 用于播放midi音频
- pcmC0D0c --〉 用于录音的pcm设备
- pcmC0D0p --〉 用于播放的pcm设备
- seq --〉 音序器
- timer --〉 定时器
其中,C0D0代表的是声卡0中的设备0,pcmC0D0c最后一个c代表capture,pcmC0D0p最后一个p代表playback,这些都是alsa-driver中的命名规则。从上面的列表可以看出,我的声卡下挂了6个设备,根据声卡的实际能力,驱动实际上可以挂上更多种类的设备,在include/sound/core.h中,定义了以下设备类型:
- #define SNDRV_DEV_TOPLEVEL ((__force snd_device_type_t) 0)
- #define SNDRV_DEV_CONTROL ((__force snd_device_type_t) 1)
- #define SNDRV_DEV_LOWLEVEL_PRE ((__force snd_device_type_t) 2)
- #define SNDRV_DEV_LOWLEVEL_NORMAL ((__force snd_device_type_t) 0x1000)
- #define SNDRV_DEV_PCM ((__force snd_device_type_t) 0x1001)
- #define SNDRV_DEV_RAWMIDI ((__force snd_device_type_t) 0x1002)
- #define SNDRV_DEV_TIMER ((__force snd_device_type_t) 0x1003)
- #define SNDRV_DEV_SEQUENCER ((__force snd_device_type_t) 0x1004)
- #define SNDRV_DEV_HWDEP ((__force snd_device_type_t) 0x1005)
- #define SNDRV_DEV_INFO ((__force snd_device_type_t) 0x1006)
- #define SNDRV_DEV_BUS ((__force snd_device_type_t) 0x1007)
- #define SNDRV_DEV_CODEC ((__force snd_device_type_t) 0x1008)
- #define SNDRV_DEV_JACK ((__force snd_device_type_t) 0x1009)
- #define SNDRV_DEV_LOWLEVEL ((__force snd_device_type_t) 0x2000)
- #define SNDRV_DEV_TOPLEVEL ((__force snd_device_type_t) 0)
- #define SNDRV_DEV_CONTROL ((__force snd_device_type_t) 1)
- #define SNDRV_DEV_LOWLEVEL_PRE ((__force snd_device_type_t) 2)
- #define SNDRV_DEV_LOWLEVEL_NORMAL ((__force snd_device_type_t) 0x1000)
- #define SNDRV_DEV_PCM ((__force snd_device_type_t) 0x1001)
- #define SNDRV_DEV_RAWMIDI ((__force snd_device_type_t) 0x1002)
- #define SNDRV_DEV_TIMER ((__force snd_device_type_t) 0x1003)
- #define SNDRV_DEV_SEQUENCER ((__force snd_device_type_t) 0x1004)
- #define SNDRV_DEV_HWDEP ((__force snd_device_type_t) 0x1005)
- #define SNDRV_DEV_INFO ((__force snd_device_type_t) 0x1006)
- #define SNDRV_DEV_BUS ((__force snd_device_type_t) 0x1007)
- #define SNDRV_DEV_CODEC ((__force snd_device_type_t) 0x1008)
- #define SNDRV_DEV_JACK ((__force snd_device_type_t) 0x1009)
- #define SNDRV_DEV_LOWLEVEL ((__force snd_device_type_t) 0x2000)
通常,我们更关心的是pcm和control这两种设备。
三. 驱动的代码文件结构
在Linux2.6代码树中,Alsa的代码文件结构如下:
sound
/core
/oss
/seq
/ioctl32
/include
/drivers
/i2c
/synth
/emux
/pci
/(cards)
/isa
/(cards)
/arm
/ppc
/sparc
/usb
/pcmcia /(cards)
/oss
/soc
/codecs
- core 该目录包含了ALSA驱动的中间层,它是整个ALSA驱动的核心部分
- core/oss 包含模拟旧的OSS架构的PCM和Mixer模块
- core/seq 有关音序器相关的代码
- include ALSA驱动的公共头文件目录,该目录的头文件需要导出给用户空间的应用程序使用,通常,驱动模块私有的头文件不应放置在这里
- drivers 放置一些与CPU、BUS架构无关的公用代码
- i2c ALSA自己的I2C控制代码
- pci pci声卡的顶层目录,子目录包含各种pci声卡的代码
- isa isa声卡的顶层目录,子目录包含各种isa声卡的代码
- soc 针对system-on-chip体系的中间层代码
- soc/codecs 针对soc体系的各种codec的代码,与平台无关
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!
1. struct snd_card
1.1. snd_card是什么
snd_card可以说是整个ALSA音频驱动最顶层的一个结构,整个声卡的软件逻辑结构开始于该结构,几乎所有与声音相关的逻辑设备都是在snd_card的管理之下,声卡驱动的第一个动作通常就是创建一个snd_card结构体。正因为如此,本节中,我们也从 struct cnd_card开始吧。
1.2. snd_card的定义
snd_card的定义位于改头文件中:include/sound/core.h
- /* main structure for soundcard */
- struct snd_card {
- int number; /* number of soundcard (index to
- snd_cards) */
- char id[16]; /* id string of this card */
- char driver[16]; /* driver name */
- char shortname[32]; /* short name of this soundcard */
- char longname[80]; /* name of this soundcard */
- char mixername[80]; /* mixer name */
- char components[128]; /* card components delimited with
- space */
- struct module *module; /* top-level module */
- void *private_data; /* private data for soundcard */
- void (*private_free) (struct snd_card *card); /* callback for freeing of
- private data */
- struct list_head devices; /* devices */
- unsigned int last_numid; /* last used numeric ID */
- struct rw_semaphore controls_rwsem; /* controls list lock */
- rwlock_t ctl_files_rwlock; /* ctl_files list lock */
- int controls_count; /* count of all controls */
- int user_ctl_count; /* count of all user controls */
- struct list_head controls; /* all controls for this card */
- struct list_head ctl_files; /* active control files */
- struct snd_info_entry *proc_root; /* root for soundcard specific files */
- struct snd_info_entry *proc_id; /* the card id */
- struct proc_dir_entry *proc_root_link; /* number link to real id */
- struct list_head files_list; /* all files associated to this card */
- struct snd_shutdown_f_ops *s_f_ops; /* file operations in the shutdown
- state */
- spinlock_t files_lock; /* lock the files for this card */
- int shutdown; /* this card is going down */
- int free_on_last_close; /* free in context of file_release */
- wait_queue_head_t shutdown_sleep;
- struct device *dev; /* device assigned to this card */
- #ifndef CONFIG_SYSFS_DEPRECATED
- struct device *card_dev; /* cardX object for sysfs */
- #endif
- #ifdef CONFIG_PM
- unsigned int power_state; /* power state */
- struct mutex power_lock; /* power lock */
- wait_queue_head_t power_sleep;
- #endif
- #if defined(CONFIG_SND_MIXER_OSS) || defined(CONFIG_SND_MIXER_OSS_MODULE)
- struct snd_mixer_oss *mixer_oss;
- int mixer_oss_change_count;
- #endif
- };
- /* main structure for soundcard */
- struct snd_card {
- int number; /* number of soundcard (index to
- snd_cards) */
- char id[16]; /* id string of this card */
- char driver[16]; /* driver name */
- char shortname[32]; /* short name of this soundcard */
- char longname[80]; /* name of this soundcard */
- char mixername[80]; /* mixer name */
- char components[128]; /* card components delimited with
- space */
- struct module *module; /* top-level module */
- void *private_data; /* private data for soundcard */
- void (*private_free) (struct snd_card *card); /* callback for freeing of
- private data */
- struct list_head devices; /* devices */
- unsigned int last_numid; /* last used numeric ID */
- struct rw_semaphore controls_rwsem; /* controls list lock */
- rwlock_t ctl_files_rwlock; /* ctl_files list lock */
- int controls_count; /* count of all controls */
- int user_ctl_count; /* count of all user controls */
- struct list_head controls; /* all controls for this card */
- struct list_head ctl_files; /* active control files */
- struct snd_info_entry *proc_root; /* root for soundcard specific files */
- struct snd_info_entry *proc_id; /* the card id */
- struct proc_dir_entry *proc_root_link; /* number link to real id */
- struct list_head files_list; /* all files associated to this card */
- struct snd_shutdown_f_ops *s_f_ops; /* file operations in the shutdown
- state */
- spinlock_t files_lock; /* lock the files for this card */
- int shutdown; /* this card is going down */
- int free_on_last_close; /* free in context of file_release */
- wait_queue_head_t shutdown_sleep;
- struct device *dev; /* device assigned to this card */
- #ifndef CONFIG_SYSFS_DEPRECATED
- struct device *card_dev; /* cardX object for sysfs */
- #endif
- #ifdef CONFIG_PM
- unsigned int power_state; /* power state */
- struct mutex power_lock; /* power lock */
- wait_queue_head_t power_sleep;
- #endif
- #if defined(CONFIG_SND_MIXER_OSS) || defined(CONFIG_SND_MIXER_OSS_MODULE)
- struct snd_mixer_oss *mixer_oss;
- int mixer_oss_change_count;
- #endif
- };
- struct list_head devices 记录该声卡下所有逻辑设备的链表
- struct list_head controls 记录该声卡下所有的控制单元的链表
- void *private_data 声卡的私有数据,可以在创建声卡时通过参数指定数据的大小
2. 声卡的建立流程
2.1.1. 第一步,创建snd_card的一个实例
- struct snd_card *card;
- int err;
- ....
- err = snd_card_create(index, id, THIS_MODULE, 0, &card);
- struct snd_card *card;
- int err;
- ....
- err = snd_card_create(index, id, THIS_MODULE, 0, &card);
- index 一个整数值,该声卡的编号
- id 字符串,声卡的标识符
- 第四个参数 该参数决定在创建snd_card实例时,需要同时额外分配的私有数据的大小,该数据的指针最终会赋值给snd_card的private_data数据成员
- card 返回所创建的snd_card实例的指针
2.1.2. 第二步,创建声卡的芯片专用数据
声卡的专用数据主要用于存放该声卡的一些资源信息,例如中断资源、io资源、dma资源等。可以有两种创建方法:
- 通过上一步中snd_card_create()中的第四个参数,让snd_card_create自己创建
- // struct mychip 用于保存专用数据
- err = snd_card_create(index, id, THIS_MODULE,
- sizeof(struct mychip), &card);
- // 从private_data中取出
- struct mychip *chip = card->private_data;
- // struct mychip 用于保存专用数据
- err = snd_card_create(index, id, THIS_MODULE,
- sizeof(struct mychip), &card);
- // 从private_data中取出
- struct mychip *chip = card->private_data;
- 自己创建:
- struct mychip {
- struct snd_card *card;
- ....
- };
- struct snd_card *card;
- struct mychip *chip;
- err = snd_card_create(index[dev], id[dev], THIS_MODULE, 0, &card);
- // 专用数据记录snd_card实例
- chip->card = card;
- .....
- chip = kzalloc(sizeof(*chip), GFP_KERNEL);
- struct mychip {
- struct snd_card *card;
- ....
- };
- struct snd_card *card;
- struct mychip *chip;
- err = snd_card_create(index[dev], id[dev], THIS_MODULE, 0, &card);
- // 专用数据记录snd_card实例
- chip->card = card;
- .....
- chip = kzalloc(sizeof(*chip), GFP_KERNEL);
然后,把芯片的专有数据注册为声卡的一个低阶设备:
- static int snd_mychip_dev_free(struct snd_device *device)
- {
- return snd_mychip_free(device->device_data);
- }
- static struct snd_device_ops ops = {
- .dev_free = snd_mychip_dev_free,
- };
- ....
- snd_device_new(card, SNDRV_DEV_LOWLEVEL, chip, &ops);
- static int snd_mychip_dev_free(struct snd_device *device)
- {
- return snd_mychip_free(device->device_data);
- }
- static struct snd_device_ops ops = {
- .dev_free = snd_mychip_dev_free,
- };
- ....
- snd_device_new(card, SNDRV_DEV_LOWLEVEL, chip, &ops);
2.1.3. 第三步,设置Driver的ID和名字
- strcpy(card->driver, "My Chip");
- strcpy(card->shortname, "My Own Chip 123");
- sprintf(card->longname, "%s at 0x%lx irq %i",
- card->shortname, chip->ioport, chip->irq);
- strcpy(card->driver, "My Chip");
- strcpy(card->shortname, "My Own Chip 123");
- sprintf(card->longname, "%s at 0x%lx irq %i",
- card->shortname, chip->ioport, chip->irq);
snd_card的driver字段保存着芯片的ID字符串,user空间的alsa-lib会使用到该字符串,所以必须要保证该ID的唯一性。shortname字段更多地用于打印信息,longname字段则会出现在/proc/asound/cards中。
2.1.4. 第四步,创建声卡的功能部件(逻辑设备),例如PCM,Mixer,MIDI等
这时候可以创建声卡的各种功能部件了,还记得开头的snd_card结构体的devices字段吗?每一种部件的创建最终会调用snd_device_new()来生成一个snd_device实例,并把该实例链接到snd_card的devices链表中。
通常,alsa-driver的已经提供了一些常用的部件的创建函数,而不必直接调用snd_device_new(),比如:
PCM ---- snd_pcm_new()
RAWMIDI -- snd_rawmidi_new()
CONTROL -- snd_ctl_create()
TIMER -- snd_timer_new()
INFO -- snd_card_proc_new()
JACK -- snd_jack_new()
2.1.5. 第五步,注册声卡
- err = snd_card_register(card);
- if (err < 0) {
- snd_card_free(card);
- return err;
- }
- err = snd_card_register(card);
- if (err < 0) {
- snd_card_free(card);
- return err;
- }
2.2. 一个实际的例子
我把/sound/arm/pxa2xx-ac97.c的部分代码贴上来:
- static int __devinit pxa2xx_ac97_probe(struct platform_device *dev)
- {
- struct snd_card *card;
- struct snd_ac97_bus *ac97_bus;
- struct snd_ac97_template ac97_template;
- int ret;
- pxa2xx_audio_ops_t *pdata = dev->dev.platform_data;
- if (dev->id >= 0) {
- dev_err(&dev->dev, "PXA2xx has only one AC97 port./n");
- ret = -ENXIO;
- goto err_dev;
- }
- (1)
- ret = snd_card_create(SNDRV_DEFAULT_IDX1, SNDRV_DEFAULT_STR1,
- THIS_MODULE, 0, &card);
- if (ret < 0)
- goto err;
- card->dev = &dev->dev;
- (3)
- strncpy(card->driver, dev->dev.driver->name, sizeof(card->driver));
- (4)
- ret = pxa2xx_pcm_new(card, &pxa2xx_ac97_pcm_client, &pxa2xx_ac97_pcm);
- if (ret)
- goto err;
- (2)
- ret = pxa2xx_ac97_hw_probe(dev);
- if (ret)
- goto err;
- (4)
- ret = snd_ac97_bus(card, 0, &pxa2xx_ac97_ops, NULL, &ac97_bus);
- if (ret)
- goto err_remove;
- memset(&ac97_template, 0, sizeof(ac97_template));
- ret = snd_ac97_mixer(ac97_bus, &ac97_template, &pxa2xx_ac97_ac97);
- if (ret)
- goto err_remove;
- (3)
- snprintf(card->shortname, sizeof(card->shortname),
- "%s", snd_ac97_get_short_name(pxa2xx_ac97_ac97));
- snprintf(card->longname, sizeof(card->longname),
- "%s (%s)", dev->dev.driver->name, card->mixername);
- if (pdata && pdata->codec_pdata[0])
- snd_ac97_dev_add_pdata(ac97_bus->codec[0], pdata->codec_pdata[0]);
- snd_card_set_dev(card, &dev->dev);
- (5)
- ret = snd_card_register(card);
- if (ret == 0) {
- platform_set_drvdata(dev, card);
- return 0;
- }
- err_remove:
- pxa2xx_ac97_hw_remove(dev);
- err:
- if (card)
- snd_card_free(card);
- err_dev:
- return ret;
- }
- static int __devexit pxa2xx_ac97_remove(struct platform_device *dev)
- {
- struct snd_card *card = platform_get_drvdata(dev);
- if (card) {
- snd_card_free(card);
- platform_set_drvdata(dev, NULL);
- pxa2xx_ac97_hw_remove(dev);
- }
- return 0;
- }
- static struct platform_driver pxa2xx_ac97_driver = {
- .probe = pxa2xx_ac97_probe,
- .remove = __devexit_p(pxa2xx_ac97_remove),
- .driver = {
- .name = "pxa2xx-ac97",
- .owner = THIS_MODULE,
- #ifdef CONFIG_PM
- .pm = &pxa2xx_ac97_pm_ops,
- #endif
- },
- };
- static int __init pxa2xx_ac97_init(void)
- {
- return platform_driver_register(&pxa2xx_ac97_driver);
- }
- static void __exit pxa2xx_ac97_exit(void)
- {
- platform_driver_unregister(&pxa2xx_ac97_driver);
- }
- module_init(pxa2xx_ac97_init);
- module_exit(pxa2xx_ac97_exit);
- MODULE_AUTHOR("Nicolas Pitre");
- MODULE_DESCRIPTION("AC97 driver for the Intel PXA2xx chip");
- static int __devinit pxa2xx_ac97_probe(struct platform_device *dev)
- {
- struct snd_card *card;
- struct snd_ac97_bus *ac97_bus;
- struct snd_ac97_template ac97_template;
- int ret;
- pxa2xx_audio_ops_t *pdata = dev->dev.platform_data;
- if (dev->id >= 0) {
- dev_err(&dev->dev, "PXA2xx has only one AC97 port./n");
- ret = -ENXIO;
- goto err_dev;
- }
- (1)
- ret = snd_card_create(SNDRV_DEFAULT_IDX1, SNDRV_DEFAULT_STR1,
- THIS_MODULE, 0, &card);
- if (ret < 0)
- goto err;
- card->dev = &dev->dev;
- (3)
- strncpy(card->driver, dev->dev.driver->name, sizeof(card->driver));
- (4)
- ret = pxa2xx_pcm_new(card, &pxa2xx_ac97_pcm_client, &pxa2xx_ac97_pcm);
- if (ret)
- goto err;
- (2)
- ret = pxa2xx_ac97_hw_probe(dev);
- if (ret)
- goto err;
- (4)
- ret = snd_ac97_bus(card, 0, &pxa2xx_ac97_ops, NULL, &ac97_bus);
- if (ret)
- goto err_remove;
- memset(&ac97_template, 0, sizeof(ac97_template));
- ret = snd_ac97_mixer(ac97_bus, &ac97_template, &pxa2xx_ac97_ac97);
- if (ret)
- goto err_remove;
- (3)
- snprintf(card->shortname, sizeof(card->shortname),
- "%s", snd_ac97_get_short_name(pxa2xx_ac97_ac97));
- snprintf(card->longname, sizeof(card->longname),
- "%s (%s)", dev->dev.driver->name, card->mixername);
- if (pdata && pdata->codec_pdata[0])
- snd_ac97_dev_add_pdata(ac97_bus->codec[0], pdata->codec_pdata[0]);
- snd_card_set_dev(card, &dev->dev);
- (5)
- ret = snd_card_register(card);
- if (ret == 0) {
- platform_set_drvdata(dev, card);
- return 0;
- }
- err_remove:
- pxa2xx_ac97_hw_remove(dev);
- err:
- if (card)
- snd_card_free(card);
- err_dev:
- return ret;
- }
- static int __devexit pxa2xx_ac97_remove(struct platform_device *dev)
- {
- struct snd_card *card = platform_get_drvdata(dev);
- if (card) {
- snd_card_free(card);
- platform_set_drvdata(dev, NULL);
- pxa2xx_ac97_hw_remove(dev);
- }
- return 0;
- }
- static struct platform_driver pxa2xx_ac97_driver = {
- .probe = pxa2xx_ac97_probe,
- .remove = __devexit_p(pxa2xx_ac97_remove),
- .driver = {
- .name = "pxa2xx-ac97",
- .owner = THIS_MODULE,
- #ifdef CONFIG_PM
- .pm = &pxa2xx_ac97_pm_ops,
- #endif
- },
- };
- static int __init pxa2xx_ac97_init(void)
- {
- return platform_driver_register(&pxa2xx_ac97_driver);
- }
- static void __exit pxa2xx_ac97_exit(void)
- {
- platform_driver_unregister(&pxa2xx_ac97_driver);
- }
- module_init(pxa2xx_ac97_init);
- module_exit(pxa2xx_ac97_exit);
- MODULE_AUTHOR("Nicolas Pitre");
- MODULE_DESCRIPTION("AC97 driver for the Intel PXA2xx chip");
驱动程序通常由probe回调函数开始,对一下2.1中的步骤,是否有相似之处?
经过以上的创建步骤之后,声卡的逻辑结构如下图所示:
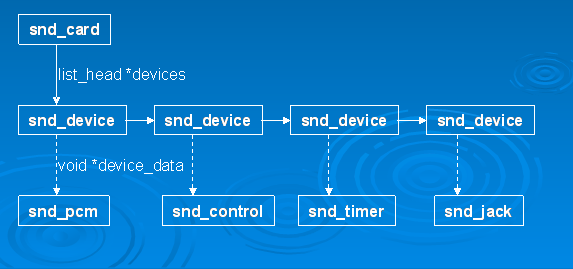
图 2.2.1 声卡的软件逻辑结构
下面的章节里我们分别讨论一下snd_card_create()和snd_card_register()这两个函数。
3. snd_card_create()
snd_card_create()在/sound/core/init.c中定义。
- /**
- * snd_card_create - create and initialize a soundcard structure
- * @idx: card index (address) [0 ... (SNDRV_CARDS-1)]
- * @xid: card identification (ASCII string)
- * @module: top level module for locking
- * @extra_size: allocate this extra size after the main soundcard structure
- * @card_ret: the pointer to store the created card instance
- *
- * Creates and initializes a soundcard structure.
- *
- * The function allocates snd_card instance via kzalloc with the given
- * space for the driver to use freely. The allocated struct is stored
- * in the given card_ret pointer.
- *
- * Returns zero if successful or a negative error code.
- */
- int snd_card_create(int idx, const char *xid,
- struct module *module, int extra_size,
- struct snd_card **card_ret)
- /**
- * snd_card_create - create and initialize a soundcard structure
- * @idx: card index (address) [0 ... (SNDRV_CARDS-1)]
- * @xid: card identification (ASCII string)
- * @module: top level module for locking
- * @extra_size: allocate this extra size after the main soundcard structure
- * @card_ret: the pointer to store the created card instance
- *
- * Creates and initializes a soundcard structure.
- *
- * The function allocates snd_card instance via kzalloc with the given
- * space for the driver to use freely. The allocated struct is stored
- * in the given card_ret pointer.
- *
- * Returns zero if successful or a negative error code.
- */
- int snd_card_create(int idx, const char *xid,
- struct module *module, int extra_size,
- struct snd_card **card_ret)
首先,根据extra_size参数的大小分配内存,该内存区可以作为芯片的专有数据使用(见前面的介绍):
- card = kzalloc(sizeof(*card) + extra_size, GFP_KERNEL);
- if (!card)
- return -ENOMEM;
- card = kzalloc(sizeof(*card) + extra_size, GFP_KERNEL);
- if (!card)
- return -ENOMEM;
拷贝声卡的ID字符串:
- if (xid)
- strlcpy(card->id, xid, sizeof(card->id));
- if (xid)
- strlcpy(card->id, xid, sizeof(card->id));
如果传入的声卡编号为-1,自动分配一个索引编号:
- if (idx < 0) {
- for (idx2 = 0; idx2 < SNDRV_CARDS; idx2++)
- /* idx == -1 == 0xffff means: take any free slot */
- if (~snd_cards_lock & idx & 1<<idx2) {
- if (module_slot_match(module, idx2)) {
- idx = idx2;
- break;
- }
- }
- }
- if (idx < 0) {
- for (idx2 = 0; idx2 < SNDRV_CARDS; idx2++)
- /* idx == -1 == 0xffff means: take any free slot */
- if (~snd_cards_lock & idx & 1<<idx2) {
- if (!slots[idx2] || !*slots[idx2]) {
- idx = idx2;
- break;
- }
- }
- }
- if (idx < 0) {
- for (idx2 = 0; idx2 < SNDRV_CARDS; idx2++)
- /* idx == -1 == 0xffff means: take any free slot */
- if (~snd_cards_lock & idx & 1<<idx2) {
- if (module_slot_match(module, idx2)) {
- idx = idx2;
- break;
- }
- }
- }
- if (idx < 0) {
- for (idx2 = 0; idx2 < SNDRV_CARDS; idx2++)
- /* idx == -1 == 0xffff means: take any free slot */
- if (~snd_cards_lock & idx & 1<<idx2) {
- if (!slots[idx2] || !*slots[idx2]) {
- idx = idx2;
- break;
- }
- }
- }
初始化snd_card结构中必要的字段:
- card->number = idx;
- card->module = module;
- INIT_LIST_HEAD(&card->devices);
- init_rwsem(&card->controls_rwsem);
- rwlock_init(&card->ctl_files_rwlock);
- INIT_LIST_HEAD(&card->controls);
- INIT_LIST_HEAD(&card->ctl_files);
- spin_lock_init(&card->files_lock);
- INIT_LIST_HEAD(&card->files_list);
- init_waitqueue_head(&card->shutdown_sleep);
- #ifdef CONFIG_PM
- mutex_init(&card->power_lock);
- init_waitqueue_head(&card->power_sleep);
- #endif
- card->number = idx;
- card->module = module;
- INIT_LIST_HEAD(&card->devices);
- init_rwsem(&card->controls_rwsem);
- rwlock_init(&card->ctl_files_rwlock);
- INIT_LIST_HEAD(&card->controls);
- INIT_LIST_HEAD(&card->ctl_files);
- spin_lock_init(&card->files_lock);
- INIT_LIST_HEAD(&card->files_list);
- init_waitqueue_head(&card->shutdown_sleep);
- #ifdef CONFIG_PM
- mutex_init(&card->power_lock);
- init_waitqueue_head(&card->power_sleep);
- #endif
建立逻辑设备:Control
- /* the control interface cannot be accessed from the user space until */
- /* snd_cards_bitmask and snd_cards are set with snd_card_register */
- err = snd_ctl_create(card);
- /* the control interface cannot be accessed from the user space until */
- /* snd_cards_bitmask and snd_cards are set with snd_card_register */
- err = snd_ctl_create(card);
建立proc文件中的info节点:通常就是/proc/asound/card0
- err = snd_info_card_create(card);
- err = snd_info_card_create(card);
把第一步分配的内存指针放入private_data字段中:
- if (extra_size > 0)
- card->private_data = (char *)card + sizeof(struct snd_card);
- if (extra_size > 0)
- card->private_data = (char *)card + sizeof(struct snd_card);
4. snd_card_register()
snd_card_create()在/sound/core/init.c中定义。
- /**
- * snd_card_register - register the soundcard
- * @card: soundcard structure
- *
- * This function registers all the devices assigned to the soundcard.
- * Until calling this, the ALSA control interface is blocked from the
- * external accesses. Thus, you should call this function at the end
- * of the initialization of the card.
- *
- * Returns zero otherwise a negative error code if the registrain failed.
- */
- int snd_card_register(struct snd_card *card)
- /**
- * snd_card_register - register the soundcard
- * @card: soundcard structure
- *
- * This function registers all the devices assigned to the soundcard.
- * Until calling this, the ALSA control interface is blocked from the
- * external accesses. Thus, you should call this function at the end
- * of the initialization of the card.
- *
- * Returns zero otherwise a negative error code if the registrain failed.
- */
- int snd_card_register(struct snd_card *card)
首先,创建sysfs下的设备:
- if (!card->card_dev) {
- card->card_dev = device_create(sound_class, card->dev,
- MKDEV(0, 0), card,
- "card%i", card->number);
- if (IS_ERR(card->card_dev))
- card->card_dev = NULL;
- }
- if (!card->card_dev) {
- card->card_dev = device_create(sound_class, card->dev,
- MKDEV(0, 0), card,
- "card%i", card->number);
- if (IS_ERR(card->card_dev))
- card->card_dev = NULL;
- }
其中,sound_class是在/sound/sound_core.c中创建的:
- static char *sound_devnode(struct device *dev, mode_t *mode)
- {
- if (MAJOR(dev->devt) == SOUND_MAJOR)
- return NULL;
- return kasprintf(GFP_KERNEL, "snd/%s", dev_name(dev));
- }
- static int __init init_soundcore(void)
- {
- int rc;
- rc = init_oss_soundcore();
- if (rc)
- return rc;
- sound_class = class_create(THIS_MODULE, "sound");
- if (IS_ERR(sound_class)) {
- cleanup_oss_soundcore();
- return PTR_ERR(sound_class);
- }
- sound_class->devnode = sound_devnode;
- return 0;
- }
- static char *sound_devnode(struct device *dev, mode_t *mode)
- {
- if (MAJOR(dev->devt) == SOUND_MAJOR)
- return NULL;
- return kasprintf(GFP_KERNEL, "snd/%s", dev_name(dev));
- }
- static int __init init_soundcore(void)
- {
- int rc;
- rc = init_oss_soundcore();
- if (rc)
- return rc;
- sound_class = class_create(THIS_MODULE, "sound");
- if (IS_ERR(sound_class)) {
- cleanup_oss_soundcore();
- return PTR_ERR(sound_class);
- }
- sound_class->devnode = sound_devnode;
- return 0;
- }
由此可见,声卡的class将会出现在文件系统的/sys/class/sound/下面,并且,sound_devnode()也决定了相应的设备节点也将会出现在/dev/snd/下面。
接下来的步骤,通过snd_device_register_all()注册所有挂在该声卡下的逻辑设备,snd_device_register_all()实际上是通过snd_card的devices链表,遍历所有的snd_device,并且调用snd_device的ops->dev_register()来实现各自设备的注册的。
- if ((err = snd_device_register_all(card)) < 0)
- return err;
- if ((err = snd_device_register_all(card)) < 0)
- return err;
最后就是建立一些相应的proc和sysfs下的文件或属性节点,代码就不贴了。
至此,整个声卡完成了建立过程。
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!
1. PCM是什么
PCM是英文Pulse-code modulation的缩写,中文译名是脉冲编码调制。我们知道在现实生活中,人耳听到的声音是模拟信号,PCM就是要把声音从模拟转换成数字信号的一种技术,他的原理简单地说就是利用一个固定的频率对模拟信号进行采样,采样后的信号在波形上看就像一串连续的幅值不一的脉冲,把这些脉冲的幅值按一定的精度进行量化,这些量化后的数值被连续地输出、传输、处理或记录到存储介质中,所有这些组成了数字音频的产生过程。
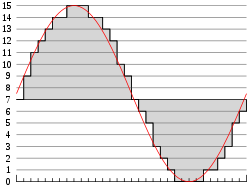
图1.1 模拟音频的采样、量化
PCM信号的两个重要指标是采样频率和量化精度,目前,CD音频的采样频率通常为44100Hz,量化精度是16bit。通常,播放音乐时,应用程序从存储介质中读取音频数据(MP3、WMA、AAC......),经过解码后,最终送到音频驱动程序中的就是PCM数据,反过来,在录音时,音频驱动不停地把采样所得的PCM数据送回给应用程序,由应用程序完成压缩、存储等任务。所以,音频驱动的两大核心任务就是:
- playback 如何把用户空间的应用程序发过来的PCM数据,转化为人耳可以辨别的模拟音频
- capture 把mic拾取到得模拟信号,经过采样、量化,转换为PCM信号送回给用户空间的应用程序
2. alsa-driver中的PCM中间层
ALSA已经为我们实现了功能强劲的PCM中间层,自己的驱动中只要实现一些底层的需要访问硬件的函数即可。
要访问PCM的中间层代码,你首先要包含头文件<sound/pcm.h>,另外,如果需要访问一些与 hw_param相关的函数,可能也要包含<sound/pcm_params.h>。
每个声卡最多可以包含4个pcm的实例,每个pcm实例对应一个pcm设备文件。pcm实例数量的这种限制源于linux设备号所占用的位大小,如果以后使用64位的设备号,我们将可以创建更多的pcm实例。不过大多数情况下,在嵌入式设备中,一个pcm实例已经足够了。
一个pcm实例由一个playback stream和一个capture stream组成,这两个stream又分别有一个或多个substreams组成。

图2.1 声卡中的pcm结构
在嵌入式系统中,通常不会像图2.1中这么复杂,大多数情况下是一个声卡,一个pcm实例,pcm下面有一个playback和capture stream,playback和capture下面各自有一个substream。
下面一张图列出了pcm中间层几个重要的结构,他可以让我们从uml的角度看一看这列结构的关系,理清他们之间的关系,对我们理解pcm中间层的实现方式。
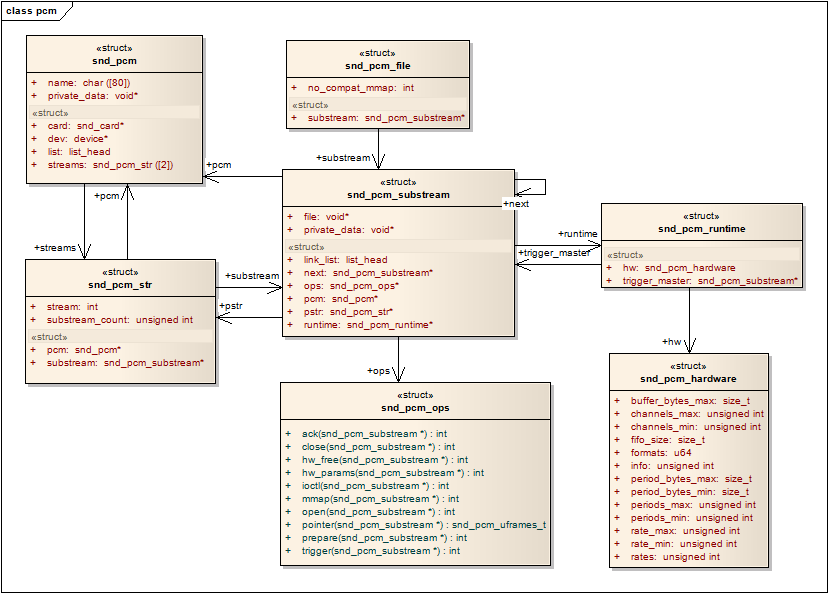
图2.2 pcm中间层的几个重要的结构体的关系图
- snd_pcm是挂在snd_card下面的一个snd_device
- snd_pcm中的字段:streams[2],该数组中的两个元素指向两个snd_pcm_str结构,分别代表playback stream和capture stream
- snd_pcm_str中的substream字段,指向snd_pcm_substream结构
- snd_pcm_substream是pcm中间层的核心,绝大部分任务都是在substream中处理,尤其是他的ops(snd_pcm_ops)字段,许多user空间的应用程序通过alsa-lib对驱动程序的请求都是由该结构中的函数处理。它的runtime字段则指向snd_pcm_runtime结构,snd_pcm_runtime记录这substream的一些重要的软件和硬件运行环境和参数。
3. 新建一个pcm
alsa-driver的中间层已经为我们提供了新建pcm的api:
int snd_pcm_new(struct snd_card *card, const char *id, int device, int playback_count, int capture_count,
struct snd_pcm ** rpcm);
参数device 表示目前创建的是该声卡下的第几个pcm,第一个pcm设备从0开始。
参数playback_count 表示该pcm将会有几个playback substream。
参数capture_count 表示该pcm将会有几个capture substream。
另一个用于设置pcm操作函数接口的api:
void snd_pcm_set_ops(struct snd_pcm *pcm, int direction, struct snd_pcm_ops *ops);
新建一个pcm可以用下面一张新建pcm的调用的序列图进行描述:
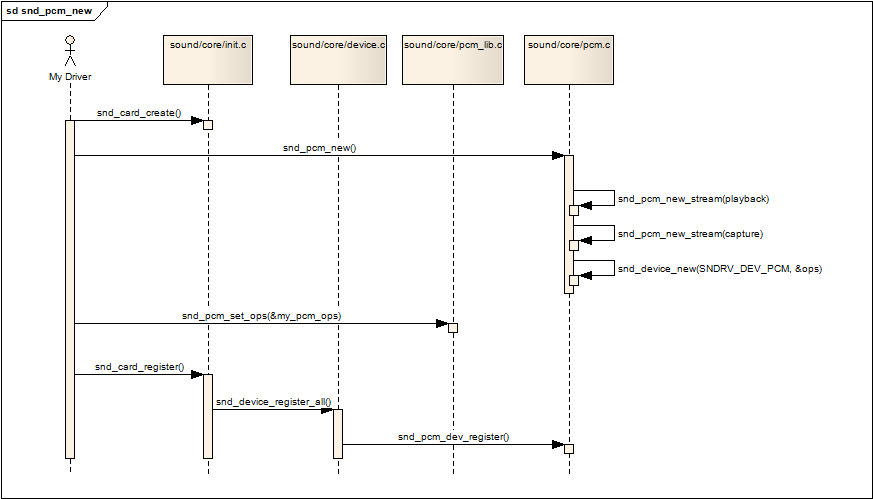
图3.1 新建pcm的序列图
- snd_card_create pcm是声卡下的一个设备(部件),所以第一步是要创建一个声卡
- snd_pcm_new 调用该api创建一个pcm,才该api中会做以下事情
- 如果有,建立playback stream,相应的substream也同时建立
- 如果有,建立capture stream,相应的substream也同时建立
- 调用snd_device_new()把该pcm挂到声卡中,参数ops中的dev_register字段指向了函数snd_pcm_dev_register,这个回调函数会在声卡的注册阶段被调用。
- snd_pcm_set_ops 设置操作该pcm的控制/操作接口函数,参数中的snd_pcm_ops结构中的函数通常就是我们驱动要实现的函数
- snd_card_register 注册声卡,在这个阶段会遍历声卡下的所有逻辑设备,并且调用各设备的注册回调函数,对于pcm,就是第二步提到的snd_pcm_dev_register函数,该回调函数建立了和用户空间应用程序(alsa-lib)通信所用的设备文件节点:/dev/snd/pcmCxxDxxp和/dev/snd/pcmCxxDxxc
4. 设备文件节点的建立(dev/snd/pcmCxxDxxp、pcmCxxDxxc)
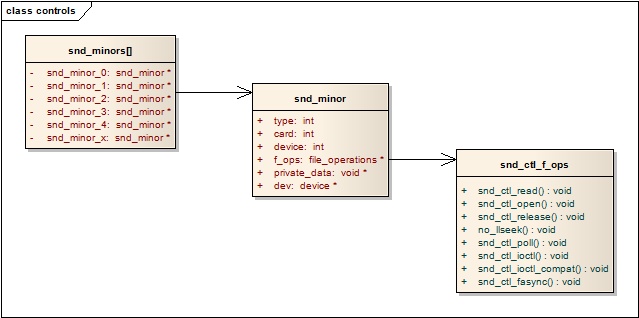
4.1 struct snd_minor
每个snd_minor结构体保存了声卡下某个逻辑设备的上下文信息,他在逻辑设备建立阶段被填充,在逻辑设备被使用时就可以从该结构体中得到相应的信息。pcm设备也不例外,也需要使用该结构体。该结构体在include/sound/core.h中定义。
- struct snd_minor {
- int type; /* SNDRV_DEVICE_TYPE_XXX */
- int card; /* card number */
- int device; /* device number */
- const struct file_operations *f_ops; /* file operations */
- void *private_data; /* private data for f_ops->open */
- struct device *dev; /* device for sysfs */
- };
- struct snd_minor {
- int type; /* SNDRV_DEVICE_TYPE_XXX */
- int card; /* card number */
- int device; /* device number */
- const struct file_operations *f_ops; /* file operations */
- void *private_data; /* private data for f_ops->open */
- struct device *dev; /* device for sysfs */
- };
在sound/sound.c中定义了一个snd_minor指针的全局数组:
- static struct snd_minor *snd_minors[256];
- static struct snd_minor *snd_minors[256];
前面说过,在声卡的注册阶段(snd_card_register),会调用pcm的回调函数snd_pcm_dev_register(),这个函数里会调用函数snd_register_device_for_dev():
- static int snd_pcm_dev_register(struct snd_device *device)
- {
- ......
- /* register pcm */
- err = snd_register_device_for_dev(devtype, pcm->card,
- pcm->device,
- &snd_pcm_f_ops[cidx],
- pcm, str, dev);
- ......
- }
- static int snd_pcm_dev_register(struct snd_device *device)
- {
- ......
- /* register pcm */
- err = snd_register_device_for_dev(devtype, pcm->card,
- pcm->device,
- &snd_pcm_f_ops[cidx],
- pcm, str, dev);
- ......
- }
我们再进入snd_register_device_for_dev():
- int snd_register_device_for_dev(int type, struct snd_card *card, int dev,
- const struct file_operations *f_ops,
- void *private_data,
- const char *name, struct device *device)
- {
- int minor;
- struct snd_minor *preg;
- if (snd_BUG_ON(!name))
- return -EINVAL;
- preg = kmalloc(sizeof *preg, GFP_KERNEL);
- if (preg == NULL)
- return -ENOMEM;
- preg->type = type;
- preg->card = card ? card->number : -1;
- preg->device = dev;
- preg->f_ops = f_ops;
- preg->private_data = private_data;
- mutex_lock(&sound_mutex);
- #ifdef CONFIG_SND_DYNAMIC_MINORS
- minor = snd_find_free_minor();
- #else
- minor = snd_kernel_minor(type, card, dev);
- if (minor >= 0 && snd_minors[minor])
- minor = -EBUSY;
- #endif
- if (minor < 0) {
- mutex_unlock(&sound_mutex);
- kfree(preg);
- return minor;
- }
- snd_minors[minor] = preg;
- preg->dev = device_create(sound_class, device, MKDEV(major, minor),
- private_data, "%s", name);
- if (IS_ERR(preg->dev)) {
- snd_minors[minor] = NULL;
- mutex_unlock(&sound_mutex);
- minor = PTR_ERR(preg->dev);
- kfree(preg);
- return minor;
- }
- mutex_unlock(&sound_mutex);
- return 0;
- }
- int snd_register_device_for_dev(int type, struct snd_card *card, int dev,
- const struct file_operations *f_ops,
- void *private_data,
- const char *name, struct device *device)
- {
- int minor;
- struct snd_minor *preg;
- if (snd_BUG_ON(!name))
- return -EINVAL;
- preg = kmalloc(sizeof *preg, GFP_KERNEL);
- if (preg == NULL)
- return -ENOMEM;
- preg->type = type;
- preg->card = card ? card->number : -1;
- preg->device = dev;
- preg->f_ops = f_ops;
- preg->private_data = private_data;
- mutex_lock(&sound_mutex);
- #ifdef CONFIG_SND_DYNAMIC_MINORS
- minor = snd_find_free_minor();
- #else
- minor = snd_kernel_minor(type, card, dev);
- if (minor >= 0 && snd_minors[minor])
- minor = -EBUSY;
- #endif
- if (minor < 0) {
- mutex_unlock(&sound_mutex);
- kfree(preg);
- return minor;
- }
- snd_minors[minor] = preg;
- preg->dev = device_create(sound_class, device, MKDEV(major, minor),
- private_data, "%s", name);
- if (IS_ERR(preg->dev)) {
- snd_minors[minor] = NULL;
- mutex_unlock(&sound_mutex);
- minor = PTR_ERR(preg->dev);
- kfree(preg);
- return minor;
- }
- mutex_unlock(&sound_mutex);
- return 0;
- }
- 首先,分配并初始化一个snd_minor结构中的各字段
- type:SNDRV_DEVICE_TYPE_PCM_PLAYBACK/SNDRV_DEVICE_TYPE_PCM_CAPTURE
- card: card的编号
- device:pcm实例的编号,大多数情况为0
- f_ops:snd_pcm_f_ops
- private_data:指向该pcm的实例
- 根据type,card和pcm的编号,确定数组的索引值minor,minor也作为pcm设备的此设备号
- 把该snd_minor结构的地址放入全局数组snd_minors[minor]中
- 最后,调用device_create创建设备节点
4.2 设备文件的建立
在4.1节的最后,设备文件已经建立,不过4.1节的重点在于snd_minors数组的赋值过程,在本节中,我们把重点放在设备文件中。
回到pcm的回调函数snd_pcm_dev_register()中:
- static int snd_pcm_dev_register(struct snd_device *device)
- {
- int cidx, err;
- char str[16];
- struct snd_pcm *pcm;
- struct device *dev;
- pcm = device->device_data;
- ......
- for (cidx = 0; cidx < 2; cidx++) {
- ......
- switch (cidx) {
- case SNDRV_PCM_STREAM_PLAYBACK:
- sprintf(str, "pcmC%iD%ip", pcm->card->number, pcm->device);
- devtype = SNDRV_DEVICE_TYPE_PCM_PLAYBACK;
- break;
- case SNDRV_PCM_STREAM_CAPTURE:
- sprintf(str, "pcmC%iD%ic", pcm->card->number, pcm->device);
- devtype = SNDRV_DEVICE_TYPE_PCM_CAPTURE;
- break;
- }
- /* device pointer to use, pcm->dev takes precedence if
- * it is assigned, otherwise fall back to card's device
- * if possible */
- dev = pcm->dev;
- if (!dev)
- dev = snd_card_get_device_link(pcm->card);
- /* register pcm */
- err = snd_register_device_for_dev(devtype, pcm->card,
- pcm->device,
- &snd_pcm_f_ops[cidx],
- pcm, str, dev);
- ......
- }
- ......
- }
- static int snd_pcm_dev_register(struct snd_device *device)
- {
- int cidx, err;
- char str[16];
- struct snd_pcm *pcm;
- struct device *dev;
- pcm = device->device_data;
- ......
- for (cidx = 0; cidx < 2; cidx++) {
- ......
- switch (cidx) {
- case SNDRV_PCM_STREAM_PLAYBACK:
- sprintf(str, "pcmC%iD%ip", pcm->card->number, pcm->device);
- devtype = SNDRV_DEVICE_TYPE_PCM_PLAYBACK;
- break;
- case SNDRV_PCM_STREAM_CAPTURE:
- sprintf(str, "pcmC%iD%ic", pcm->card->number, pcm->device);
- devtype = SNDRV_DEVICE_TYPE_PCM_CAPTURE;
- break;
- }
- /* device pointer to use, pcm->dev takes precedence if
- * it is assigned, otherwise fall back to card's device
- * if possible */
- dev = pcm->dev;
- if (!dev)
- dev = snd_card_get_device_link(pcm->card);
- /* register pcm */
- err = snd_register_device_for_dev(devtype, pcm->card,
- pcm->device,
- &snd_pcm_f_ops[cidx],
- pcm, str, dev);
- ......
- }
- ......
- }
以上代码我们可以看出,对于一个pcm设备,可以生成两个设备文件,一个用于playback,一个用于capture,代码中也确定了他们的命名规则:
- playback -- pcmCxDxp,通常系统中只有一各声卡和一个pcm,它就是pcmC0D0p
- capture -- pcmCxDxc,通常系统中只有一各声卡和一个pcm,它就是pcmC0D0c
snd_pcm_f_ops
snd_pcm_f_ops是一个标准的文件系统file_operations结构数组,它的定义在sound/core/pcm_native.c中:
- const struct file_operations snd_pcm_f_ops[2] = {
- {
- .owner = THIS_MODULE,
- .write = snd_pcm_write,
- .aio_write = snd_pcm_aio_write,
- .open = snd_pcm_playback_open,
- .release = snd_pcm_release,
- .llseek = no_llseek,
- .poll = snd_pcm_playback_poll,
- .unlocked_ioctl = snd_pcm_playback_ioctl,
- .compat_ioctl = snd_pcm_ioctl_compat,
- .mmap = snd_pcm_mmap,
- .fasync = snd_pcm_fasync,
- .get_unmapped_area = snd_pcm_get_unmapped_area,
- },
- {
- .owner = THIS_MODULE,
- .read = snd_pcm_read,
- .aio_read = snd_pcm_aio_read,
- .open = snd_pcm_capture_open,
- .release = snd_pcm_release,
- .llseek = no_llseek,
- .poll = snd_pcm_capture_poll,
- .unlocked_ioctl = snd_pcm_capture_ioctl,
- .compat_ioctl = snd_pcm_ioctl_compat,
- .mmap = snd_pcm_mmap,
- .fasync = snd_pcm_fasync,
- .get_unmapped_area = snd_pcm_get_unmapped_area,
- }
- };
- const struct file_operations snd_pcm_f_ops[2] = {
- {
- .owner = THIS_MODULE,
- .write = snd_pcm_write,
- .aio_write = snd_pcm_aio_write,
- .open = snd_pcm_playback_open,
- .release = snd_pcm_release,
- .llseek = no_llseek,
- .poll = snd_pcm_playback_poll,
- .unlocked_ioctl = snd_pcm_playback_ioctl,
- .compat_ioctl = snd_pcm_ioctl_compat,
- .mmap = snd_pcm_mmap,
- .fasync = snd_pcm_fasync,
- .get_unmapped_area = snd_pcm_get_unmapped_area,
- },
- {
- .owner = THIS_MODULE,
- .read = snd_pcm_read,
- .aio_read = snd_pcm_aio_read,
- .open = snd_pcm_capture_open,
- .release = snd_pcm_release,
- .llseek = no_llseek,
- .poll = snd_pcm_capture_poll,
- .unlocked_ioctl = snd_pcm_capture_ioctl,
- .compat_ioctl = snd_pcm_ioctl_compat,
- .mmap = snd_pcm_mmap,
- .fasync = snd_pcm_fasync,
- .get_unmapped_area = snd_pcm_get_unmapped_area,
- }
- };
snd_pcm_f_ops作为snd_register_device_for_dev的参数被传入,并被记录在snd_minors[minor]中的字段f_ops中。最后,在snd_register_device_for_dev中创建设备节点:
- snd_minors[minor] = preg;
- preg->dev = device_create(sound_class, device, MKDEV(major, minor),
- private_data, "%s", name);
- snd_minors[minor] = preg;
- preg->dev = device_create(sound_class, device, MKDEV(major, minor),
- private_data, "%s", name);
4.3 层层深入,从应用程序到驱动层pcm
4.3.1 字符设备注册
在sound/core/sound.c中有alsa_sound_init()函数,定义如下:
- static int __init alsa_sound_init(void)
- {
- snd_major = major;
- snd_ecards_limit = cards_limit;
- if (register_chrdev(major, "alsa", &snd_fops)) {
- snd_printk(KERN_ERR "unable to register native major device number %d/n", major);
- return -EIO;
- }
- if (snd_info_init() < 0) {
- unregister_chrdev(major, "alsa");
- return -ENOMEM;
- }
- snd_info_minor_register();
- return 0;
- }
- static int __init alsa_sound_init(void)
- {
- snd_major = major;
- snd_ecards_limit = cards_limit;
- if (register_chrdev(major, "alsa", &snd_fops)) {
- snd_printk(KERN_ERR "unable to register native major device number %d/n", major);
- return -EIO;
- }
- if (snd_info_init() < 0) {
- unregister_chrdev(major, "alsa");
- return -ENOMEM;
- }
- snd_info_minor_register();
- return 0;
- }
register_chrdev中的参数major与之前创建pcm设备是device_create时的major是同一个,这样的结果是,当应用程序open设备文件/dev/snd/pcmCxDxp时,会进入snd_fops的open回调函数,我们将在下一节中讲述open的过程。
4.3.2 打开pcm设备
从上一节中我们得知,open一个pcm设备时,将会调用snd_fops的open回调函数,我们先看看snd_fops的定义:
- static const struct file_operations snd_fops =
- {
- .owner = THIS_MODULE,
- .open = snd_open
- };
- static const struct file_operations snd_fops =
- {
- .owner = THIS_MODULE,
- .open = snd_open
- };
跟入snd_open函数,它首先从inode中取出此设备号,然后以次设备号为索引,从snd_minors全局数组中取出当初注册pcm设备时填充的snd_minor结构(参看4.1节的内容),然后从snd_minor结构中取出pcm设备的f_ops,并且把file->f_op替换为pcm设备的f_ops,紧接着直接调用pcm设备的f_ops->open(),然后返回。因为file->f_op已经被替换,以后,应用程序的所有read/write/ioctl调用都会进入pcm设备自己的回调函数中,也就是4.2节中提到的snd_pcm_f_ops结构中定义的回调。
- static int snd_open(struct inode *inode, struct file *file)
- {
- unsigned int minor = iminor(inode);
- struct snd_minor *mptr = NULL;
- const struct file_operations *old_fops;
- int err = 0;
- if (minor >= ARRAY_SIZE(snd_minors))
- return -ENODEV;
- mutex_lock(&sound_mutex);
- mptr = snd_minors[minor];
- if (mptr == NULL) {
- mptr = autoload_device(minor);
- if (!mptr) {
- mutex_unlock(&sound_mutex);
- return -ENODEV;
- }
- }
- old_fops = file->f_op;
- file->f_op = fops_get(mptr->f_ops);
- if (file->f_op == NULL) {
- file->f_op = old_fops;
- err = -ENODEV;
- }
- mutex_unlock(&sound_mutex);
- if (err < 0)
- return err;
- if (file->f_op->open) {
- err = file->f_op->open(inode, file);
- if (err) {
- fops_put(file->f_op);
- file->f_op = fops_get(old_fops);
- }
- }
- fops_put(old_fops);
- return err;
- }
- static int snd_open(struct inode *inode, struct file *file)
- {
- unsigned int minor = iminor(inode);
- struct snd_minor *mptr = NULL;
- const struct file_operations *old_fops;
- int err = 0;
- if (minor >= ARRAY_SIZE(snd_minors))
- return -ENODEV;
- mutex_lock(&sound_mutex);
- mptr = snd_minors[minor];
- if (mptr == NULL) {
- mptr = autoload_device(minor);
- if (!mptr) {
- mutex_unlock(&sound_mutex);
- return -ENODEV;
- }
- }
- old_fops = file->f_op;
- file->f_op = fops_get(mptr->f_ops);
- if (file->f_op == NULL) {
- file->f_op = old_fops;
- err = -ENODEV;
- }
- mutex_unlock(&sound_mutex);
- if (err < 0)
- return err;
- if (file->f_op->open) {
- err = file->f_op->open(inode, file);
- if (err) {
- fops_put(file->f_op);
- file->f_op = fops_get(old_fops);
- }
- }
- fops_put(old_fops);
- return err;
- }
下面的序列图展示了应用程序如何最终调用到snd_pcm_f_ops结构中的回调函数:
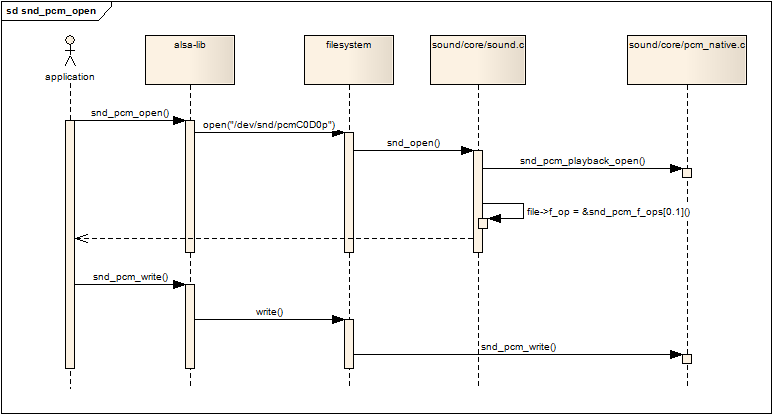
图4.3.2.1 应用程序操作pcm设备
Control接口
Control接口主要让用户空间的应用程序(alsa-lib)可以访问和控制音频codec芯片中的多路开关,滑动控件等。对于Mixer(混音)来说,Control接口显得尤为重要,从ALSA 0.9.x版本开始,所有的mixer工作都是通过control接口的API来实现的。
ALSA已经为AC97定义了完整的控制接口模型,如果你的Codec芯片只支持AC97接口,你可以不用关心本节的内容。
<sound/control.h>定义了所有的Control API。如果你要为你的codec实现自己的controls,请在代码中包含该头文件。
Controls的定义
要自定义一个Control,我们首先要定义3各回调函数:info,get和put。然后,定义一个snd_kcontrol_new结构:
- static struct snd_kcontrol_new my_control __devinitdata = {
- .iface = SNDRV_CTL_ELEM_IFACE_MIXER,
- .name = "PCM Playback Switch",
- .index = 0,
- .access = SNDRV_CTL_ELEM_ACCESS_READWRITE,
- .private_value = 0xffff,
- .info = my_control_info,
- .get = my_control_get,
- .put = my_control_put
- };
- static struct snd_kcontrol_new my_control __devinitdata = {
- .iface = SNDRV_CTL_ELEM_IFACE_MIXER,
- .name = "PCM Playback Switch",
- .index = 0,
- .access = SNDRV_CTL_ELEM_ACCESS_READWRITE,
- .private_value = 0xffff,
- .info = my_control_info,
- .get = my_control_get,
- .put = my_control_put
- };
iface字段指出了control的类型,alsa定义了几种类型(SNDDRV_CTL_ELEM_IFACE_XXX),常用的类型是MIXER,当然也可以定义属于全局的CARD类型,也可以定义属于某类设备的类型,例如HWDEP,PCMRAWMIDI,TIMER等,这时需要在device和subdevice字段中指出卡的设备逻辑编号。
name字段是该control的名字,从ALSA 0.9.x开始,control的名字是变得比较重要,因为control的作用是按名字来归类的。ALSA已经预定义了一些control的名字,我们再Control Name一节详细讨论。
index字段用于保存该control的在该卡中的编号。如果声卡中有不止一个codec,每个codec中有相同名字的control,这时我们可以通过index来区分这些controls。当index为0时,则可以忽略这种区分策略。
access字段包含了该control的访问类型。每一个bit代表一种访问类型,这些访问类型可以多个“或”运算组合在一起。
private_value字段包含了一个任意的长整数类型值。该值可以通过info,get,put这几个回调函数访问。你可以自己决定如何使用该字段,例如可以把它拆分成多个位域,又或者是一个指针,指向某一个数据结构。
tlv字段为该control提供元数据。
Control的名字
control的名字需要遵循一些标准,通常可以分成3部分来定义control的名字:源--方向--功能。
- 源,可以理解为该control的输入端,alsa已经预定义了一些常用的源,例如:Master,PCM,CD,Line等等。
- 方向,代表该control的数据流向,例如:Playback,Capture,Bypass,Bypass Capture等等,也可以不定义方向,这时表示该Control是双向的(playback和capture)。
- 功能,根据control的功能,可以是以下字符串:Switch,Volume,Route等等。
也有一些命名上的特例:
- 全局的capture和playback "Capture Source","Capture Volume","Capture Switch",它们用于全局的capture source,switch和volume。同理,"Playback Volume","Playback Switch",它们用于全局的输出switch和volume。
- Tone-controles 音调控制的开关和音量命名为:Tone Control - XXX,例如,"Tone Control - Switch","Tone Control - Bass","Tone Control - Center"。
- 3D controls 3D控件的命名规则:,"3D Control - Switch","3D Control - Center","3D Control - Space"。
- Mic boost 麦克风音量加强控件命名为:"Mic Boost"或"Mic Boost(6dB)"。
访问标志(ACCESS Flags)
Access字段是一个bitmask,它保存了改control的访问类型。默认的访问类型是:SNDDRV_CTL_ELEM_ACCESS_READWRITE,表明该control支持读和写操作。如果access字段没有定义(.access==0),此时也认为是READWRITE类型。
如果是一个只读control,access应该设置为:SNDDRV_CTL_ELEM_ACCESS_READ,这时,我们不必定义put回调函数。类似地,如果是只写control,access应该设置为:SNDDRV_CTL_ELEM_ACCESS_WRITE,这时,我们不必定义get回调函数。
如果control的值会频繁地改变(例如:电平表),我们可以使用VOLATILE类型,这意味着该control会在没有通知的情况下改变,应用程序应该定时地查询该control的值。
回调函数
info回调函数
info回调函数用于获取control的详细信息。它的主要工作就是填充通过参数传入的snd_ctl_elem_info对象,以下例子是一个具有单个元素的boolean型control的info回调:
- static int snd_myctl_mono_info(struct snd_kcontrol *kcontrol,
- struct snd_ctl_elem_info *uinfo)
- {
- uinfo->type = SNDRV_CTL_ELEM_TYPE_BOOLEAN;
- uinfo->count = 1;
- uinfo->value.integer.min = 0;
- uinfo->value.integer.max = 1;
- return 0;
- }
- static int snd_myctl_mono_info(struct snd_kcontrol *kcontrol,
- struct snd_ctl_elem_info *uinfo)
- {
- uinfo->type = SNDRV_CTL_ELEM_TYPE_BOOLEAN;
- uinfo->count = 1;
- uinfo->value.integer.min = 0;
- uinfo->value.integer.max = 1;
- return 0;
- }
type字段指出该control的值类型,值类型可以是BOOLEAN, INTEGER, ENUMERATED, BYTES,IEC958和INTEGER64之一。count字段指出了改control中包含有多少个元素单元,比如,立体声的音量control左右两个声道的音量值,它的count字段等于2。value字段是一个联合体(union),value的内容和control的类型有关。其中,boolean和integer类型是相同的。
ENUMERATED类型有些特殊。它的value需要设定一个字符串和字符串的索引,请看以下例子:
- static int snd_myctl_enum_info(struct snd_kcontrol *kcontrol,
- struct snd_ctl_elem_info *uinfo)
- {
- static char *texts[4] = {
- "First", "Second", "Third", "Fourth"
- };
- uinfo->type = SNDRV_CTL_ELEM_TYPE_ENUMERATED;
- uinfo->count = 1;
- uinfo->value.enumerated.items = 4;
- if (uinfo->value.enumerated.item > 3)
- uinfo->value.enumerated.item = 3;
- strcpy(uinfo->value.enumerated.name,
- texts[uinfo->value.enumerated.item]);
- return 0;
- }
- static int snd_myctl_enum_info(struct snd_kcontrol *kcontrol,
- struct snd_ctl_elem_info *uinfo)
- {
- static char *texts[4] = {
- "First", "Second", "Third", "Fourth"
- };
- uinfo->type = SNDRV_CTL_ELEM_TYPE_ENUMERATED;
- uinfo->count = 1;
- uinfo->value.enumerated.items = 4;
- if (uinfo->value.enumerated.item > 3)
- uinfo->value.enumerated.item = 3;
- strcpy(uinfo->value.enumerated.name,
- texts[uinfo->value.enumerated.item]);
- return 0;
- }
alsa已经为我们实现了一些通用的info回调函数,例如:snd_ctl_boolean_mono_info(),snd_ctl_boolean_stereo_info()等等。
get回调函数
该回调函数用于读取control的当前值,并返回给用户空间的应用程序。
- static int snd_myctl_get(struct snd_kcontrol *kcontrol,
- struct snd_ctl_elem_value *ucontrol)
- {
- struct mychip *chip = snd_kcontrol_chip(kcontrol);
- ucontrol->value.integer.value[0] = get_some_value(chip);
- return 0;
- }
- static int snd_myctl_get(struct snd_kcontrol *kcontrol,
- struct snd_ctl_elem_value *ucontrol)
- {
- struct mychip *chip = snd_kcontrol_chip(kcontrol);
- ucontrol->value.integer.value[0] = get_some_value(chip);
- return 0;
- }
value字段的赋值依赖于control的类型(如同info回调)。很多声卡的驱动利用它存储硬件寄存器的地址、bit-shift和bit-mask,这时,private_value字段可以按以下例子进行设置:
.private_value = reg | (shift << 16) | (mask << 24);
然后,get回调函数可以这样实现:
static int snd_sbmixer_get_single(struct snd_kcontrol *kcontrol,
struct snd_ctl_elem_value *ucontrol)
{
int reg = kcontrol->private_value & 0xff;
int shift = (kcontrol->private_value >> 16) & 0xff;
int mask = (kcontrol->private_value >> 24) & 0xff;
....
//根据以上的值读取相应寄存器的值并填入value中
}
如果control的count字段大于1,表示control有多个元素单元,get回调函数也应该为value填充多个数值。
put回调函数
put回调函数用于把应用程序的控制值设置到control中。
- static int snd_myctl_put(struct snd_kcontrol *kcontrol,
- struct snd_ctl_elem_value *ucontrol)
- {
- struct mychip *chip = snd_kcontrol_chip(kcontrol);
- int changed = 0;
- if (chip->current_value !=
- ucontrol->value.integer.value[0]) {
- change_current_value(chip,
- ucontrol->value.integer.value[0]);
- changed = 1;
- }
- return changed;
- }
- static int snd_myctl_put(struct snd_kcontrol *kcontrol,
- struct snd_ctl_elem_value *ucontrol)
- {
- struct mychip *chip = snd_kcontrol_chip(kcontrol);
- int changed = 0;
- if (chip->current_value !=
- ucontrol->value.integer.value[0]) {
- change_current_value(chip,
- ucontrol->value.integer.value[0]);
- changed = 1;
- }
- return changed;
- }
如上述例子所示,当control的值被改变时,put回调必须要返回1,如果值没有被改变,则返回0。如果发生了错误,则返回一个负数的错误号。
和get回调一样,当control的count大于1时,put回调也要处理多个control中的元素值。
创建Controls
当把以上讨论的内容都准备好了以后,我们就可以创建我们自己的control了。alsa-driver为我们提供了两个用于创建control的API:
- snd_ctl_new1()
- snd_ctl_add()
我们可以用以下最简单的方式创建control:
- err = snd_ctl_add(card, snd_ctl_new1(&my_control, chip));
- if (err < 0)
- return err;
- err = snd_ctl_add(card, snd_ctl_new1(&my_control, chip));
- if (err < 0)
- return err;
在这里,my_control是一个之前定义好的snd_kcontrol_new对象,chip对象将会被赋值在kcontrol->private_data字段,该字段可以在回调函数中访问。
snd_ctl_new1()会分配一个新的snd_kcontrol实例,并把my_control中相应的值复制到该实例中,所以,在定义my_control时,通常我们可以加上__devinitdata前缀。snd_ctl_add则把该control绑定到声卡对象card当中。
元数据(Metadata)
很多mixer control需要提供以dB为单位的信息,我们可以使用DECLARE_TLV_xxx宏来定义一些包含这种信息的变量,然后把control的tlv.p字段指向这些变量,最后,在access字段中加上SNDRV_CTL_ELEM_ACCESS_TLV_READ标志,就像这样:
static DECLARE_TLV_DB_SCALE(db_scale_my_control, -4050, 150, 0);
static struct snd_kcontrol_new my_control __devinitdata = {
...
.access = SNDRV_CTL_ELEM_ACCESS_READWRITE |
SNDRV_CTL_ELEM_ACCESS_TLV_READ,
...
.tlv.p = db_scale_my_control,
};
DECLARE_TLV_DB_SCALE宏定义的mixer control,它所代表的值按一个固定的dB值的步长变化。该宏的第一个参数是要定义变量的名字,第二个参数是最小值,以0.01dB为单位。第三个参数是变化的步长,也是以0.01dB为单位。如果该control处于最小值时会做出mute时,需要把第四个参数设为1。
DECLARE_TLV_DB_LINEAR宏定义的mixer control,它的输出随值的变化而线性变化。 该宏的第一个参数是要定义变量的名字,第二个参数是最小值,以0.01dB为单位。第二个参数是最大值,以0.01dB为单位。如果该control处于最小值时会做出mute时,需要把第二个参数设为TLV_DB_GAIN_MUTE。
这两个宏实际上就是定义一个整形数组,所谓tlv,就是Type-Lenght-Value的意思,数组的第0各元素代表数据的类型,第1个元素代表数据的长度,第三个元素和之后的元素保存该变量的数据。
Control设备的建立
Control设备和PCM设备一样,都属于声卡下的逻辑设备。用户空间的应用程序通过alsa-lib访问该Control设备,读取或控制control的控制状态,从而达到控制音频Codec进行各种Mixer等控制操作。
Control设备的创建过程大体上和PCM设备的创建过程相同。详细的创建过程可以参考本博的另一篇文章:Linux音频驱动之三:PCM设备的创建。下面我们只讨论有区别的地方。
我们需要在我们的驱动程序初始化时主动调用snd_pcm_new()函数创建pcm设备,而control设备则在snd_card_create()内被创建,snd_card_create()通过调用snd_ctl_create()函数创建control设备节点。所以我们无需显式地创建control设备,只要建立声卡,control设备被自动地创建。
和pcm设备一样,control设备的名字遵循一定的规则:controlCxx,这里的xx代表声卡的编号。我们也可以通过代码正是这一点,下面的是snd_ctl_dev_register()函数的代码:
- /*
- * registration of the control device
- */
- static int snd_ctl_dev_register(struct snd_device *device)
- {
- struct snd_card *card = device->device_data;
- int err, cardnum;
- char name[16];
- if (snd_BUG_ON(!card))
- return -ENXIO;
- cardnum = card->number;
- if (snd_BUG_ON(cardnum < 0 || cardnum >= SNDRV_CARDS))
- return -ENXIO;
- /* control设备的名字 */
- sprintf(name, "controlC%i", cardnum);
- if ((err = snd_register_device(SNDRV_DEVICE_TYPE_CONTROL, card, -1,
- &snd_ctl_f_ops, card, name)) < 0)
- return err;
- return 0;
- }
- /*
- * registration of the control device
- */
- static int snd_ctl_dev_register(struct snd_device *device)
- {
- struct snd_card *card = device->device_data;
- int err, cardnum;
- char name[16];
- if (snd_BUG_ON(!card))
- return -ENXIO;
- cardnum = card->number;
- if (snd_BUG_ON(cardnum < 0 || cardnum >= SNDRV_CARDS))
- return -ENXIO;
- /* control设备的名字 */
- sprintf(name, "controlC%i", cardnum);
- if ((err = snd_register_device(SNDRV_DEVICE_TYPE_CONTROL, card, -1,
- &snd_ctl_f_ops, card, name)) < 0)
- return err;
- return 0;
- }
snd_ctl_dev_register()函数会在snd_card_register()中,即声卡的注册阶段被调用。注册完成后,control设备的相关信息被保存在snd_minors[]数组中,用control设备的此设备号作索引,即可在snd_minors[]数组中找出相关的信息。注册完成后的数据结构关系可以用下图进行表述:
control设备的操作函数入口
用户程序需要打开control设备时,驱动程序通过snd_minors[]全局数组和此设备号,可以获得snd_ctl_f_ops结构中的各个回调函数,然后通过这些回调函数访问control中的信息和数据(最终会调用control的几个回调函数get,put,info)。详细的代码我就不贴了,大家可以读一下代码:/sound/core/control.c。
1. ASoC的由来
ASoC--ALSA System on Chip ,是建立在标准ALSA驱动层上,为了更好地支持嵌入式处理器和移动设备中的音频Codec的一套软件体系。在ASoc出现之前,内核对于SoC中的音频已经有部分的支持,不过会有一些局限性:
- Codec驱动与SoC CPU的底层耦合过于紧密,这种不理想会导致代码的重复,例如,仅是wm8731的驱动,当时Linux中有分别针对4个平台的驱动代码。
- 音频事件没有标准的方法来通知用户,例如耳机、麦克风的插拔和检测,这些事件在移动设备中是非常普通的,而且通常都需要特定于机器的代码进行重新对音频路劲进行配置。
- 当进行播放或录音时,驱动会让整个codec处于上电状态,这对于PC没问题,但对于移动设备来说,这意味着浪费大量的电量。同时也不支持通过改变过取样频率和偏置电流来达到省电的目的。
ASoC正是为了解决上述种种问题而提出的,目前已经被整合至内核的代码树中:sound/soc。ASoC不能单独存在,他只是建立在标准ALSA驱动上的一个它必须和标准的ALSA驱动框架相结合才能工作。
/********************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!
/********************************************************************************************/
2. 硬件架构
通常,就像软件领域里的抽象和重用一样,嵌入式设备的音频系统可以被划分为板载硬件(Machine)、Soc(Platform)、Codec三大部分,如下图所示:
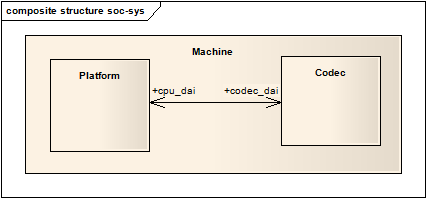
图2.1 音频系统结构
- Machine 是指某一款机器,可以是某款设备,某款开发板,又或者是某款智能手机,由此可以看出Machine几乎是不可重用的,每个Machine上的硬件实现可能都不一样,CPU不一样,Codec不一样,音频的输入、输出设备也不一样,Machine为CPU、Codec、输入输出设备提供了一个载体。
- Platform 一般是指某一个SoC平台,比如pxaxxx,s3cxxxx,omapxxx等等,与音频相关的通常包含该SoC中的时钟、DMA、I2S、PCM等等,只要指定了SoC,那么我们可以认为它会有一个对应的Platform,它只与SoC相关,与Machine无关,这样我们就可以把Platform抽象出来,使得同一款SoC不用做任何的改动,就可以用在不同的Machine中。实际上,把Platform认为是某个SoC更好理解。
- Codec 字面上的意思就是编解码器,Codec里面包含了I2S接口、D/A、A/D、Mixer、PA(功放),通常包含多种输入(Mic、Line-in、I2S、PCM)和多个输出(耳机、喇叭、听筒,Line-out),Codec和Platform一样,是可重用的部件,同一个Codec可以被不同的Machine使用。嵌入式Codec通常通过I2C对内部的寄存器进行控制。
3. 软件架构
在软件层面,ASoC也把嵌入式设备的音频系统同样分为3大部分,Machine,Platform和Codec。
- Codec驱动 ASoC中的一个重要设计原则就是要求Codec驱动是平台无关的,它包含了一些音频的控件(Controls),音频接口,DAMP(动态音频电源管理)的定义和某些Codec IO功能。为了保证硬件无关性,任何特定于平台和机器的代码都要移到Platform和Machine驱动中。所有的Codec驱动都要提供以下特性:
- Codec DAI 和 PCM的配置信息;
- Codec的IO控制方式(I2C,SPI等);
- Mixer和其他的音频控件;
- Codec的ALSA音频操作接口;
必要时,也可以提供以下功能:
- DAPM描述信息;
- DAPM事件处理程序;
- DAC数字静音控制
- Platform驱动 它包含了该SoC平台的音频DMA和音频接口的配置和控制(I2S,PCM,AC97等等);它也不能包含任何与板子或机器相关的代码。
- Machine驱动 Machine驱动负责处理机器特有的一些控件和音频事件(例如,当播放音频时,需要先行打开一个放大器);单独的Platform和Codec驱动是不能工作的,它必须由Machine驱动把它们结合在一起才能完成整个设备的音频处理工作。
4. 数据结构
整个ASoC是由一些列数据结构组成,要搞清楚ASoC的工作机理,必须要理解这一系列数据结构之间的关系和作用,下面的关系图展示了ASoC中重要的数据结构之间的关联方式:
图4.1 Kernel-2.6.35-ASoC中各个结构的静态关系
ASoC把声卡实现为一个Platform Device,然后利用Platform_device结构中的dev字段:dev.drvdata,它实际上指向一个snd_soc_device结构。可以认为snd_soc_device是整个ASoC数据结构的根本,由他开始,引出一系列的数据结构用于表述音频的各种特性和功能。snd_soc_device结构引出了snd_soc_card和soc_codec_device两个结构,然后snd_soc_card又引出了snd_soc_platform、snd_soc_dai_link和snd_soc_codec结构。如上所述,ASoC被划分为Machine、Platform和Codec三大部分,如果从这些数据结构看来,snd_codec_device和snd_soc_card代表着Machine驱动,snd_soc_platform则代表着Platform驱动,snd_soc_codec和soc_codec_device则代表了Codec驱动,而snd_soc_dai_link则负责连接Platform和Codec。
5. 3.0版内核对ASoC的改进
本来写这篇文章的时候参考的内核版本是2.6.35,不过有CSDN的朋友提出在内核版本3.0版本中,ASoC做了较大的变化。故特意下载了3.0的代码,发现确实有所变化,下面先贴出数据结构的静态关系图:
图5.1 Kernel 3.0中的ASoC数据结构
由上图我们可以看出,3.0中的数据结构更为合理和清晰,取消了snd_soc_device结构,直接用snd_soc_card取代了它,并且强化了snd_soc_pcm_runtime的作用,同时还增加了另外两个数据结构snd_soc_codec_driver和snd_soc_platform_driver,用于明确代表Codec驱动和Platform驱动。
后续的章节中将会逐一介绍Machine和Platform以及Codec驱动的工作细节和关联。
前面一节的内容我们提到,ASoC被分为Machine、Platform和Codec三大部分,其中的Machine驱动负责Platform和Codec之间的耦合以及部分和设备或板子特定的代码,再次引用上一节的内容:Machine驱动负责处理机器特有的一些控件和音频事件(例如,当播放音频时,需要先行打开一个放大器);单独的Platform和Codec驱动是不能工作的,它必须由Machine驱动把它们结合在一起才能完成整个设备的音频处理工作。
ASoC的一切都从Machine驱动开始,包括声卡的注册,绑定Platform和Codec驱动等等,下面就让我们从Machine驱动开始讨论吧。
/********************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!
/********************************************************************************************/
1. 注册Platform Device
ASoC把声卡注册为Platform Device,我们以装配有WM8994的一款Samsung的开发板SMDK为例子做说明,WM8994是一颗Wolfson生产的多功能Codec芯片。
代码的位于:/sound/soc/samsung/smdk_wm8994.c,我们关注模块的初始化函数:
- static int __init smdk_audio_init(void)
- {
- int ret;
- smdk_snd_device = platform_device_alloc("soc-audio", -1);
- if (!smdk_snd_device)
- return -ENOMEM;
- platform_set_drvdata(smdk_snd_device, &smdk);
- ret = platform_device_add(smdk_snd_device);
- if (ret)
- platform_device_put(smdk_snd_device);
- return ret;
- }
- static int __init smdk_audio_init(void)
- {
- int ret;
- smdk_snd_device = platform_device_alloc("soc-audio", -1);
- if (!smdk_snd_device)
- return -ENOMEM;
- platform_set_drvdata(smdk_snd_device, &smdk);
- ret = platform_device_add(smdk_snd_device);
- if (ret)
- platform_device_put(smdk_snd_device);
- return ret;
- }
static int __init smdk_audio_init(void) { int ret; smdk_snd_device = platform_device_alloc("soc-audio", -1); if (!smdk_snd_device) return -ENOMEM; platform_set_drvdata(smdk_snd_device, &smdk); ret = platform_device_add(smdk_snd_device); if (ret) platform_device_put(smdk_snd_device); return ret; }
由此可见,模块初始化时,注册了一个名为soc-audio的Platform设备,同时把smdk设到platform_device结构的dev.drvdata字段中,这里引出了第一个数据结构snd_soc_card的实例smdk,他的定义如下:
- static struct snd_soc_dai_link smdk_dai[] = {
- { /* Primary DAI i/f */
- .name = "WM8994 AIF1",
- .stream_name = "Pri_Dai",
- .cpu_dai_name = "samsung-i2s.0",
- .codec_dai_name = "wm8994-aif1",
- .platform_name = "samsung-audio",
- .codec_name = "wm8994-codec",
- .init = smdk_wm8994_init_paiftx,
- .ops = &smdk_ops,
- }, { /* Sec_Fifo Playback i/f */
- .name = "Sec_FIFO TX",
- .stream_name = "Sec_Dai",
- .cpu_dai_name = "samsung-i2s.4",
- .codec_dai_name = "wm8994-aif1",
- .platform_name = "samsung-audio",
- .codec_name = "wm8994-codec",
- .ops = &smdk_ops,
- },
- };
- static struct snd_soc_card smdk = {
- .name = "SMDK-I2S",
- .owner = THIS_MODULE,
- .dai_link = smdk_dai,
- .num_links = ARRAY_SIZE(smdk_dai),
- };
- static struct snd_soc_dai_link smdk_dai[] = {
- { /* Primary DAI i/f */
- .name = "WM8994 AIF1",
- .stream_name = "Pri_Dai",
- .cpu_dai_name = "samsung-i2s.0",
- .codec_dai_name = "wm8994-aif1",
- .platform_name = "samsung-audio",
- .codec_name = "wm8994-codec",
- .init = smdk_wm8994_init_paiftx,
- .ops = &smdk_ops,
- }, { /* Sec_Fifo Playback i/f */
- .name = "Sec_FIFO TX",
- .stream_name = "Sec_Dai",
- .cpu_dai_name = "samsung-i2s.4",
- .codec_dai_name = "wm8994-aif1",
- .platform_name = "samsung-audio",
- .codec_name = "wm8994-codec",
- .ops = &smdk_ops,
- },
- };
- static struct snd_soc_card smdk = {
- .name = "SMDK-I2S",
- .owner = THIS_MODULE,
- .dai_link = smdk_dai,
- .num_links = ARRAY_SIZE(smdk_dai),
- };
static struct snd_soc_dai_link smdk_dai[] = { { /* Primary DAI i/f */ .name = "WM8994 AIF1", .stream_name = "Pri_Dai", .cpu_dai_name = "samsung-i2s.0", .codec_dai_name = "wm8994-aif1", .platform_name = "samsung-audio", .codec_name = "wm8994-codec", .init = smdk_wm8994_init_paiftx, .ops = &smdk_ops, }, { /* Sec_Fifo Playback i/f */ .name = "Sec_FIFO TX", .stream_name = "Sec_Dai", .cpu_dai_name = "samsung-i2s.4", .codec_dai_name = "wm8994-aif1", .platform_name = "samsung-audio", .codec_name = "wm8994-codec", .ops = &smdk_ops, }, }; static struct snd_soc_card smdk = { .name = "SMDK-I2S", .owner = THIS_MODULE, .dai_link = smdk_dai, .num_links = ARRAY_SIZE(smdk_dai), };
通过snd_soc_card结构,又引出了Machine驱动的另外两个个数据结构:
- snd_soc_dai_link(实例:smdk_dai[] )
- snd_soc_ops(实例:smdk_ops )
其中,snd_soc_dai_link中,指定了Platform、Codec、codec_dai、cpu_dai的名字,稍后Machine驱动将会利用这些名字去匹配已经在系统中注册的platform,codec,dai,这些注册的部件都是在另外相应的Platform驱动和Codec驱动的代码文件中定义的,这样看来,Machine驱动的设备初始化代码无非就是选择合适Platform和Codec以及dai,用他们填充以上几个数据结构,然后注册Platform设备即可。当然还要实现连接Platform和Codec的dai_link对应的ops实现,本例就是smdk_ops,它只实现了hw_params函数:smdk_hw_params。
2. 注册Platform Driver
按照Linux的设备模型,有platform_device,就一定会有platform_driver。ASoC的platform_driver在以下文件中定义:sound/soc/soc-core.c。
还是先从模块的入口看起:
- static int __init snd_soc_init(void)
- {
- ......
- return platform_driver_register(&soc_driver);
- }
- static int __init snd_soc_init(void)
- {
- ......
- return platform_driver_register(&soc_driver);
- }
static int __init snd_soc_init(void) { ...... return platform_driver_register(&soc_driver); }soc_driver的定义如下:
- /* ASoC platform driver */
- static struct platform_driver soc_driver = {
- .driver = {
- .name = "soc-audio",
- .owner = THIS_MODULE,
- .pm = &soc_pm_ops,
- },
- .probe = soc_probe,
- .remove = soc_remove,
- };
- /* ASoC platform driver */
- static struct platform_driver soc_driver = {
- .driver = {
- .name = "soc-audio",
- .owner = THIS_MODULE,
- .pm = &soc_pm_ops,
- },
- .probe = soc_probe,
- .remove = soc_remove,
- };
/* ASoC platform driver */ static struct platform_driver soc_driver = { .driver = { .name = "soc-audio", .owner = THIS_MODULE, .pm = &soc_pm_ops, }, .probe = soc_probe, .remove = soc_remove, };我们看到platform_driver的name字段为soc-audio,正好与platform_device中的名字相同,按照Linux的设备模型,platform总线会匹配这两个名字相同的device和driver,同时会触发soc_probe的调用,它正是整个ASoC驱动初始化的入口。
3. 初始化入口soc_probe()
soc_probe函数本身很简单,它先从platform_device参数中取出snd_soc_card,然后调用snd_soc_register_card,通过snd_soc_register_card,为snd_soc_pcm_runtime数组申请内存,每一个dai_link对应snd_soc_pcm_runtime数组的一个单元,然后把snd_soc_card中的dai_link配置复制到相应的snd_soc_pcm_runtime中,最后,大部分的工作都在snd_soc_instantiate_card中实现,下面就看看snd_soc_instantiate_card做了些什么:
该函数首先利用card->instantiated来判断该卡是否已经实例化,如果已经实例化则直接返回,否则遍历每一对dai_link,进行codec、platform、dai的绑定工作,下只是代码的部分选节,详细的代码请直接参考完整的代码树。
- /* bind DAIs */
- for (i = 0; i < card->num_links; i++)
- soc_bind_dai_link(card, i);
- /* bind DAIs */
- for (i = 0; i < card->num_links; i++)
- soc_bind_dai_link(card, i);
/* bind DAIs */ for (i = 0; i < card->num_links; i++) soc_bind_dai_link(card, i);ASoC定义了三个全局的链表头变量:codec_list、dai_list、platform_list,系统中所有的Codec、DAI、Platform都在注册时连接到这三个全局链表上。soc_bind_dai_link函数逐个扫描这三个链表,根据card->dai_link[]中的名称进行匹配,匹配后把相应的codec,dai和platform实例赋值到card->rtd[]中(snd_soc_pcm_runtime)。经过这个过程后,snd_soc_pcm_runtime:(card->rtd)中保存了本Machine中使用的Codec,DAI和Platform驱动的信息。
snd_soc_instantiate_card接着初始化Codec的寄存器缓存,然后调用标准的alsa函数创建声卡实例:
- /* card bind complete so register a sound card */
- ret = snd_card_create(SNDRV_DEFAULT_IDX1, SNDRV_DEFAULT_STR1,
- card->owner, 0, &card->snd_card);
- card->snd_card->dev = card->dev;
- card->dapm.bias_level = SND_SOC_BIAS_OFF;
- card->dapm.dev = card->dev;
- card->dapm.card = card;
- list_add(&card->dapm.list, &card->dapm_list);
- /* card bind complete so register a sound card */
- ret = snd_card_create(SNDRV_DEFAULT_IDX1, SNDRV_DEFAULT_STR1,
- card->owner, 0, &card->snd_card);
- card->snd_card->dev = card->dev;
- card->dapm.bias_level = SND_SOC_BIAS_OFF;
- card->dapm.dev = card->dev;
- card->dapm.card = card;
- list_add(&card->dapm.list, &card->dapm_list);
/* card bind complete so register a sound card */ ret = snd_card_create(SNDRV_DEFAULT_IDX1, SNDRV_DEFAULT_STR1, card->owner, 0, &card->snd_card); card->snd_card->dev = card->dev; card->dapm.bias_level = SND_SOC_BIAS_OFF; card->dapm.dev = card->dev; card->dapm.card = card; list_add(&card->dapm.list, &card->dapm_list);
然后,依次调用各个子结构的probe函数:
- /* initialise the sound card only once */
- if (card->probe) {
- ret = card->probe(card);
- if (ret < 0)
- goto card_probe_error;
- }
- /* early DAI link probe */
- for (order = SND_SOC_COMP_ORDER_FIRST; order <= SND_SOC_COMP_ORDER_LAST;
- order++) {
- for (i = 0; i < card->num_links; i++) {
- ret = soc_probe_dai_link(card, i, order);
- if (ret < 0) {
- pr_err("asoc: failed to instantiate card %s: %d\n",
- card->name, ret);
- goto probe_dai_err;
- }
- }
- }
- for (i = 0; i < card->num_aux_devs; i++) {
- ret = soc_probe_aux_dev(card, i);
- if (ret < 0) {
- pr_err("asoc: failed to add auxiliary devices %s: %d\n",
- card->name, ret);
- goto probe_aux_dev_err;
- }
- }
- /* initialise the sound card only once */
- if (card->probe) {
- ret = card->probe(card);
- if (ret < 0)
- goto card_probe_error;
- }
- /* early DAI link probe */
- for (order = SND_SOC_COMP_ORDER_FIRST; order <= SND_SOC_COMP_ORDER_LAST;
- order++) {
- for (i = 0; i < card->num_links; i++) {
- ret = soc_probe_dai_link(card, i, order);
- if (ret < 0) {
- pr_err("asoc: failed to instantiate card %s: %d\n",
- card->name, ret);
- goto probe_dai_err;
- }
- }
- }
- for (i = 0; i < card->num_aux_devs; i++) {
- ret = soc_probe_aux_dev(card, i);
- if (ret < 0) {
- pr_err("asoc: failed to add auxiliary devices %s: %d\n",
- card->name, ret);
- goto probe_aux_dev_err;
- }
- }
/* initialise the sound card only once */ if (card->probe) { ret = card->probe(card); if (ret < 0) goto card_probe_error; } /* early DAI link probe */ for (order = SND_SOC_COMP_ORDER_FIRST; order <= SND_SOC_COMP_ORDER_LAST; order++) { for (i = 0; i < card->num_links; i++) { ret = soc_probe_dai_link(card, i, order); if (ret < 0) { pr_err("asoc: failed to instantiate card %s: %d\n", card->name, ret); goto probe_dai_err; } } } for (i = 0; i < card->num_aux_devs; i++) { ret = soc_probe_aux_dev(card, i); if (ret < 0) { pr_err("asoc: failed to add auxiliary devices %s: %d\n", card->name, ret); goto probe_aux_dev_err; } }在上面的soc_probe_dai_link()函数中做了比较多的事情,把他展开继续讨论:
- static int soc_probe_dai_link(struct snd_soc_card *card, int num, int order)
- {
- ......
- /* set default power off timeout */
- rtd->pmdown_time = pmdown_time;
- /* probe the cpu_dai */
- if (!cpu_dai->probed &&
- cpu_dai->driver->probe_order == order) {
- if (cpu_dai->driver->probe) {
- ret = cpu_dai->driver->probe(cpu_dai);
- }
- cpu_dai->probed = 1;
- /* mark cpu_dai as probed and add to card dai list */
- list_add(&cpu_dai->card_list, &card->dai_dev_list);
- }
- /* probe the CODEC */
- if (!codec->probed &&
- codec->driver->probe_order == order) {
- ret = soc_probe_codec(card, codec);
- }
- /* probe the platform */
- if (!platform->probed &&
- platform->driver->probe_order == order) {
- ret = soc_probe_platform(card, platform);
- }
- /* probe the CODEC DAI */
- if (!codec_dai->probed && codec_dai->driver->probe_order == order) {
- if (codec_dai->driver->probe) {
- ret = codec_dai->driver->probe(codec_dai);
- }
- /* mark codec_dai as probed and add to card dai list */
- codec_dai->probed = 1;
- list_add(&codec_dai->card_list, &card->dai_dev_list);
- }
- /* complete DAI probe during last probe */
- if (order != SND_SOC_COMP_ORDER_LAST)
- return 0;
- ret = soc_post_component_init(card, codec, num, 0);
- if (ret)
- return ret;
- ......
- /* create the pcm */
- ret = soc_new_pcm(rtd, num);
- ........
- return 0;
- }
- static int soc_probe_dai_link(struct snd_soc_card *card, int num, int order)
- {
- ......
- /* set default power off timeout */
- rtd->pmdown_time = pmdown_time;
- /* probe the cpu_dai */
- if (!cpu_dai->probed &&
- cpu_dai->driver->probe_order == order) {
- if (cpu_dai->driver->probe) {
- ret = cpu_dai->driver->probe(cpu_dai);
- }
- cpu_dai->probed = 1;
- /* mark cpu_dai as probed and add to card dai list */
- list_add(&cpu_dai->card_list, &card->dai_dev_list);
- }
- /* probe the CODEC */
- if (!codec->probed &&
- codec->driver->probe_order == order) {
- ret = soc_probe_codec(card, codec);
- }
- /* probe the platform */
- if (!platform->probed &&
- platform->driver->probe_order == order) {
- ret = soc_probe_platform(card, platform);
- }
- /* probe the CODEC DAI */
- if (!codec_dai->probed && codec_dai->driver->probe_order == order) {
- if (codec_dai->driver->probe) {
- ret = codec_dai->driver->probe(codec_dai);
- }
- /* mark codec_dai as probed and add to card dai list */
- codec_dai->probed = 1;
- list_add(&codec_dai->card_list, &card->dai_dev_list);
- }
- /* complete DAI probe during last probe */
- if (order != SND_SOC_COMP_ORDER_LAST)
- return 0;
- ret = soc_post_component_init(card, codec, num, 0);
- if (ret)
- return ret;
- ......
- /* create the pcm */
- ret = soc_new_pcm(rtd, num);
- ........
- return 0;
- }
static int soc_probe_dai_link(struct snd_soc_card *card, int num, int order) { ...... /* set default power off timeout */ rtd->pmdown_time = pmdown_time; /* probe the cpu_dai */ if (!cpu_dai->probed && cpu_dai->driver->probe_order == order) { if (cpu_dai->driver->probe) { ret = cpu_dai->driver->probe(cpu_dai); } cpu_dai->probed = 1; /* mark cpu_dai as probed and add to card dai list */ list_add(&cpu_dai->card_list, &card->dai_dev_list); } /* probe the CODEC */ if (!codec->probed && codec->driver->probe_order == order) { ret = soc_probe_codec(card, codec); } /* probe the platform */ if (!platform->probed && platform->driver->probe_order == order) { ret = soc_probe_platform(card, platform); } /* probe the CODEC DAI */ if (!codec_dai->probed && codec_dai->driver->probe_order == order) { if (codec_dai->driver->probe) { ret = codec_dai->driver->probe(codec_dai); } /* mark codec_dai as probed and add to card dai list */ codec_dai->probed = 1; list_add(&codec_dai->card_list, &card->dai_dev_list); } /* complete DAI probe during last probe */ if (order != SND_SOC_COMP_ORDER_LAST) return 0; ret = soc_post_component_init(card, codec, num, 0); if (ret) return ret; ...... /* create the pcm */ ret = soc_new_pcm(rtd, num); ........ return 0; }该函数出了挨个调用了codec,dai和platform驱动的probe函数外,在最后还调用了soc_new_pcm()函数用于创建标准alsa驱动的pcm逻辑设备。现在把该函数的部分代码也贴出来:
- /* create a new pcm */
- int soc_new_pcm(struct snd_soc_pcm_runtime *rtd, int num)
- {
- ......
- struct snd_pcm_ops *soc_pcm_ops = &rtd->ops;
- soc_pcm_ops->open = soc_pcm_open;
- soc_pcm_ops->close = soc_pcm_close;
- soc_pcm_ops->hw_params = soc_pcm_hw_params;
- soc_pcm_ops->hw_free = soc_pcm_hw_free;
- soc_pcm_ops->prepare = soc_pcm_prepare;
- soc_pcm_ops->trigger = soc_pcm_trigger;
- soc_pcm_ops->pointer = soc_pcm_pointer;
- ret = snd_pcm_new(rtd->card->snd_card, new_name,
- num, playback, capture, &pcm);
- /* DAPM dai link stream work */
- INIT_DELAYED_WORK(&rtd->delayed_work, close_delayed_work);
- rtd->pcm = pcm;
- pcm->private_data = rtd;
- if (platform->driver->ops) {
- soc_pcm_ops->mmap = platform->driver->ops->mmap;
- soc_pcm_ops->pointer = platform->driver->ops->pointer;
- soc_pcm_ops->ioctl = platform->driver->ops->ioctl;
- soc_pcm_ops->copy = platform->driver->ops->copy;
- soc_pcm_ops->silence = platform->driver->ops->silence;
- soc_pcm_ops->ack = platform->driver->ops->ack;
- soc_pcm_ops->page = platform->driver->ops->page;
- }
- if (playback)
- snd_pcm_set_ops(pcm, SNDRV_PCM_STREAM_PLAYBACK, soc_pcm_ops);
- if (capture)
- snd_pcm_set_ops(pcm, SNDRV_PCM_STREAM_CAPTURE, soc_pcm_ops);
- if (platform->driver->pcm_new) {
- ret = platform->driver->pcm_new(rtd);
- if (ret < 0) {
- pr_err("asoc: platform pcm constructor failed\n");
- return ret;
- }
- }
- pcm->private_free = platform->driver->pcm_free;
- return ret;
- }
- /* create a new pcm */
- int soc_new_pcm(struct snd_soc_pcm_runtime *rtd, int num)
- {
- ......
- struct snd_pcm_ops *soc_pcm_ops = &rtd->ops;
- soc_pcm_ops->open = soc_pcm_open;
- soc_pcm_ops->close = soc_pcm_close;
- soc_pcm_ops->hw_params = soc_pcm_hw_params;
- soc_pcm_ops->hw_free = soc_pcm_hw_free;
- soc_pcm_ops->prepare = soc_pcm_prepare;
- soc_pcm_ops->trigger = soc_pcm_trigger;
- soc_pcm_ops->pointer = soc_pcm_pointer;
- ret = snd_pcm_new(rtd->card->snd_card, new_name,
- num, playback, capture, &pcm);
- /* DAPM dai link stream work */
- INIT_DELAYED_WORK(&rtd->delayed_work, close_delayed_work);
- rtd->pcm = pcm;
- pcm->private_data = rtd;
- if (platform->driver->ops) {
- soc_pcm_ops->mmap = platform->driver->ops->mmap;
- soc_pcm_ops->pointer = platform->driver->ops->pointer;
- soc_pcm_ops->ioctl = platform->driver->ops->ioctl;
- soc_pcm_ops->copy = platform->driver->ops->copy;
- soc_pcm_ops->silence = platform->driver->ops->silence;
- soc_pcm_ops->ack = platform->driver->ops->ack;
- soc_pcm_ops->page = platform->driver->ops->page;
- }
- if (playback)
- snd_pcm_set_ops(pcm, SNDRV_PCM_STREAM_PLAYBACK, soc_pcm_ops);
- if (capture)
- snd_pcm_set_ops(pcm, SNDRV_PCM_STREAM_CAPTURE, soc_pcm_ops);
- if (platform->driver->pcm_new) {
- ret = platform->driver->pcm_new(rtd);
- if (ret < 0) {
- pr_err("asoc: platform pcm constructor failed\n");
- return ret;
- }
- }
- pcm->private_free = platform->driver->pcm_free;
- return ret;
- }
/* create a new pcm */ int soc_new_pcm(struct snd_soc_pcm_runtime *rtd, int num) { ...... struct snd_pcm_ops *soc_pcm_ops = &rtd->ops; soc_pcm_ops->open = soc_pcm_open; soc_pcm_ops->close = soc_pcm_close; soc_pcm_ops->hw_params = soc_pcm_hw_params; soc_pcm_ops->hw_free = soc_pcm_hw_free; soc_pcm_ops->prepare = soc_pcm_prepare; soc_pcm_ops->trigger = soc_pcm_trigger; soc_pcm_ops->pointer = soc_pcm_pointer; ret = snd_pcm_new(rtd->card->snd_card, new_name, num, playback, capture, &pcm); /* DAPM dai link stream work */ INIT_DELAYED_WORK(&rtd->delayed_work, close_delayed_work); rtd->pcm = pcm; pcm->private_data = rtd; if (platform->driver->ops) { soc_pcm_ops->mmap = platform->driver->ops->mmap; soc_pcm_ops->pointer = platform->driver->ops->pointer; soc_pcm_ops->ioctl = platform->driver->ops->ioctl; soc_pcm_ops->copy = platform->driver->ops->copy; soc_pcm_ops->silence = platform->driver->ops->silence; soc_pcm_ops->ack = platform->driver->ops->ack; soc_pcm_ops->page = platform->driver->ops->page; } if (playback) snd_pcm_set_ops(pcm, SNDRV_PCM_STREAM_PLAYBACK, soc_pcm_ops); if (capture) snd_pcm_set_ops(pcm, SNDRV_PCM_STREAM_CAPTURE, soc_pcm_ops); if (platform->driver->pcm_new) { ret = platform->driver->pcm_new(rtd); if (ret < 0) { pr_err("asoc: platform pcm constructor failed\n"); return ret; } } pcm->private_free = platform->driver->pcm_free; return ret; }该函数首先初始化snd_soc_runtime中的snd_pcm_ops字段,也就是rtd->ops中的部分成员,例如open,close,hw_params等,紧接着调用标准alsa驱动中的创建pcm的函数snd_pcm_new()创建声卡的pcm实例,pcm的private_data字段设置为该runtime变量rtd,然后用platform驱动中的snd_pcm_ops替换部分pcm中的snd_pcm_ops字段,最后,调用platform驱动的pcm_new回调,该回调实现该platform下的dma内存申请和dma初始化等相关工作。到这里,声卡和他的pcm实例创建完成。
回到snd_soc_instantiate_card函数,完成snd_card和snd_pcm的创建后,接着对dapm和dai支持的格式做出一些初始化合设置工作后,调用了 card->late_probe(card)进行一些最后的初始化合设置工作,最后则是调用标准alsa驱动的声卡注册函数对声卡进行注册:
- if (card->late_probe) {
- ret = card->late_probe(card);
- if (ret < 0) {
- dev_err(card->dev, "%s late_probe() failed: %d\n",
- card->name, ret);
- goto probe_aux_dev_err;
- }
- }
- snd_soc_dapm_new_widgets(&card->dapm);
- if (card->fully_routed)
- list_for_each_entry(codec, &card->codec_dev_list, card_list)
- snd_soc_dapm_auto_nc_codec_pins(codec);
- ret = snd_card_register(card->snd_card);
- if (ret < 0) {
- printk(KERN_ERR "asoc: failed to register soundcard for %s\n", card->name);
- goto probe_aux_dev_err;
- }
- if (card->late_probe) {
- ret = card->late_probe(card);
- if (ret < 0) {
- dev_err(card->dev, "%s late_probe() failed: %d\n",
- card->name, ret);
- goto probe_aux_dev_err;
- }
- }
- snd_soc_dapm_new_widgets(&card->dapm);
- if (card->fully_routed)
- list_for_each_entry(codec, &card->codec_dev_list, card_list)
- snd_soc_dapm_auto_nc_codec_pins(codec);
- ret = snd_card_register(card->snd_card);
- if (ret < 0) {
- printk(KERN_ERR "asoc: failed to register soundcard for %s\n", card->name);
- goto probe_aux_dev_err;
- }
if (card->late_probe) { ret = card->late_probe(card); if (ret < 0) { dev_err(card->dev, "%s late_probe() failed: %d\n", card->name, ret); goto probe_aux_dev_err; } } snd_soc_dapm_new_widgets(&card->dapm); if (card->fully_routed) list_for_each_entry(codec, &card->codec_dev_list, card_list) snd_soc_dapm_auto_nc_codec_pins(codec); ret = snd_card_register(card->snd_card); if (ret < 0) { printk(KERN_ERR "asoc: failed to register soundcard for %s\n", card->name); goto probe_aux_dev_err; }
至此,整个Machine驱动的初始化已经完成,通过各个子结构的probe调用,实际上,也完成了部分Platfrom驱动和Codec驱动的初始化工作,整个过程可以用一下的序列图表示:
图3.1 基于3.0内核 soc_probe序列图
下面的序列图是本文章第一个版本,基于内核2.6.35,大家也可以参考一下两个版本的差异:
图3.2 基于2.6.35 soc_probe序列图
1. Codec简介
在移动设备中,Codec的作用可以归结为4种,分别是:
- 对PCM等信号进行D/A转换,把数字的音频信号转换为模拟信号
- 对Mic、Linein或者其他输入源的模拟信号进行A/D转换,把模拟的声音信号转变CPU能够处理的数字信号
- 对音频通路进行控制,比如播放音乐,收听调频收音机,又或者接听电话时,音频信号在codec内的流通路线是不一样的
- 对音频信号做出相应的处理,例如音量控制,功率放大,EQ控制等等
ASoC对Codec的这些功能都定义好了一些列相应的接口,以方便地对Codec进行控制。ASoC对Codec驱动的一个基本要求是:驱动程序的代码必须要做到平台无关性,以方便同一个Codec的代码不经修改即可用在不同的平台上。以下的讨论基于wolfson的Codec芯片WM8994,kernel的版本3.3.x。
/*****************************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!
/*****************************************************************************************************/
2. ASoC中对Codec的数据抽象
描述Codec的最主要的几个数据结构分别是:snd_soc_codec,snd_soc_codec_driver,snd_soc_dai,snd_soc_dai_driver,其中的snd_soc_dai和snd_soc_dai_driver在ASoC的Platform驱动中也会使用到,Platform和Codec的DAI通过snd_soc_dai_link结构,在Machine驱动中进行绑定连接。下面我们先看看这几个结构的定义,这里我只贴出我要关注的字段,详细的定义请参照:/include/sound/soc.h。snd_soc_codec:
- /* SoC Audio Codec device */
- struct snd_soc_codec {
- const char *name; /* Codec的名字*/
- struct device *dev; /* 指向Codec设备的指针 */
- const struct snd_soc_codec_driver *driver; /* 指向该codec的驱动的指针 */
- struct snd_soc_card *card; /* 指向Machine驱动的card实例 */
- int num_dai; /* 该Codec数字接口的个数,目前越来越多的Codec带有多个I2S或者是PCM接口 */
- int (*volatile_register)(...); /* 用于判定某一寄存器是否是volatile */
- int (*readable_register)(...); /* 用于判定某一寄存器是否可读 */
- int (*writable_register)(...); /* 用于判定某一寄存器是否可写 */
- /* runtime */
- ......
- /* codec IO */
- void *control_data; /* 该指针指向的结构用于对codec的控制,通常和read,write字段联合使用 */
- enum snd_soc_control_type control_type;/* 可以是SND_SOC_SPI,SND_SOC_I2C,SND_SOC_REGMAP中的一种 */
- unsigned int (*read)(struct snd_soc_codec *, unsigned int); /* 读取Codec寄存器的函数 */
- int (*write)(struct snd_soc_codec *, unsigned int, unsigned int); /* 写入Codec寄存器的函数 */
- /* dapm */
- struct snd_soc_dapm_context dapm; /* 用于DAPM控件 */
- };
- /* SoC Audio Codec device */
- struct snd_soc_codec {
- const char *name; /* Codec的名字*/
- struct device *dev; /* 指向Codec设备的指针 */
- const struct snd_soc_codec_driver *driver; /* 指向该codec的驱动的指针 */
- struct snd_soc_card *card; /* 指向Machine驱动的card实例 */
- int num_dai; /* 该Codec数字接口的个数,目前越来越多的Codec带有多个I2S或者是PCM接口 */
- int (*volatile_register)(...); /* 用于判定某一寄存器是否是volatile */
- int (*readable_register)(...); /* 用于判定某一寄存器是否可读 */
- int (*writable_register)(...); /* 用于判定某一寄存器是否可写 */
- /* runtime */
- ......
- /* codec IO */
- void *control_data; /* 该指针指向的结构用于对codec的控制,通常和read,write字段联合使用 */
- enum snd_soc_control_type control_type;/* 可以是SND_SOC_SPI,SND_SOC_I2C,SND_SOC_REGMAP中的一种 */
- unsigned int (*read)(struct snd_soc_codec *, unsigned int); /* 读取Codec寄存器的函数 */
- int (*write)(struct snd_soc_codec *, unsigned int, unsigned int); /* 写入Codec寄存器的函数 */
- /* dapm */
- struct snd_soc_dapm_context dapm; /* 用于DAPM控件 */
- };
/* SoC Audio Codec device */ struct snd_soc_codec { const char *name; /* Codec的名字*/ struct device *dev; /* 指向Codec设备的指针 */ const struct snd_soc_codec_driver *driver; /* 指向该codec的驱动的指针 */ struct snd_soc_card *card; /* 指向Machine驱动的card实例 */ int num_dai; /* 该Codec数字接口的个数,目前越来越多的Codec带有多个I2S或者是PCM接口 */ int (*volatile_register)(...); /* 用于判定某一寄存器是否是volatile */ int (*readable_register)(...); /* 用于判定某一寄存器是否可读 */ int (*writable_register)(...); /* 用于判定某一寄存器是否可写 */ /* runtime */ ...... /* codec IO */ void *control_data; /* 该指针指向的结构用于对codec的控制,通常和read,write字段联合使用 */ enum snd_soc_control_type control_type;/* 可以是SND_SOC_SPI,SND_SOC_I2C,SND_SOC_REGMAP中的一种 */ unsigned int (*read)(struct snd_soc_codec *, unsigned int); /* 读取Codec寄存器的函数 */ int (*write)(struct snd_soc_codec *, unsigned int, unsigned int); /* 写入Codec寄存器的函数 */ /* dapm */ struct snd_soc_dapm_context dapm; /* 用于DAPM控件 */ };
snd_soc_codec_driver:
- /* codec driver */
- struct snd_soc_codec_driver {
- /* driver ops */
- int (*probe)(struct snd_soc_codec *); /* codec驱动的probe函数,由snd_soc_instantiate_card回调 */
- int (*remove)(struct snd_soc_codec *);
- int (*suspend)(struct snd_soc_codec *); /* 电源管理 */
- int (*resume)(struct snd_soc_codec *); /* 电源管理 */
- /* Default control and setup, added after probe() is run */
- const struct snd_kcontrol_new *controls; /* 音频控件指针 */
- const struct snd_soc_dapm_widget *dapm_widgets; /* dapm部件指针 */
- const struct snd_soc_dapm_route *dapm_routes; /* dapm路由指针 */
- /* codec wide operations */
- int (*set_sysclk)(...); /* 时钟配置函数 */
- int (*set_pll)(...); /* 锁相环配置函数 */
- /* codec IO */
- unsigned int (*read)(...); /* 读取codec寄存器函数 */
- int (*write)(...); /* 写入codec寄存器函数 */
- int (*volatile_register)(...); /* 用于判定某一寄存器是否是volatile */
- int (*readable_register)(...); /* 用于判定某一寄存器是否可读 */
- int (*writable_register)(...); /* 用于判定某一寄存器是否可写 */
- /* codec bias level */
- int (*set_bias_level)(...); /* 偏置电压配置函数 */
- };
- /* codec driver */
- struct snd_soc_codec_driver {
- /* driver ops */
- int (*probe)(struct snd_soc_codec *); /* codec驱动的probe函数,由snd_soc_instantiate_card回调 */
- int (*remove)(struct snd_soc_codec *);
- int (*suspend)(struct snd_soc_codec *); /* 电源管理 */
- int (*resume)(struct snd_soc_codec *); /* 电源管理 */
- /* Default control and setup, added after probe() is run */
- const struct snd_kcontrol_new *controls; /* 音频控件指针 */
- const struct snd_soc_dapm_widget *dapm_widgets; /* dapm部件指针 */
- const struct snd_soc_dapm_route *dapm_routes; /* dapm路由指针 */
- /* codec wide operations */
- int (*set_sysclk)(...); /* 时钟配置函数 */
- int (*set_pll)(...); /* 锁相环配置函数 */
- /* codec IO */
- unsigned int (*read)(...); /* 读取codec寄存器函数 */
- int (*write)(...); /* 写入codec寄存器函数 */
- int (*volatile_register)(...); /* 用于判定某一寄存器是否是volatile */
- int (*readable_register)(...); /* 用于判定某一寄存器是否可读 */
- int (*writable_register)(...); /* 用于判定某一寄存器是否可写 */
- /* codec bias level */
- int (*set_bias_level)(...); /* 偏置电压配置函数 */
- };
snd_soc_dai:/* codec driver */ struct snd_soc_codec_driver { /* driver ops */ int (*probe)(struct snd_soc_codec *); /* codec驱动的probe函数,由snd_soc_instantiate_card回调 */ int (*remove)(struct snd_soc_codec *); int (*suspend)(struct snd_soc_codec *); /* 电源管理 */ int (*resume)(struct snd_soc_codec *); /* 电源管理 */ /* Default control and setup, added after probe() is run */ const struct snd_kcontrol_new *controls; /* 音频控件指针 */ const struct snd_soc_dapm_widget *dapm_widgets; /* dapm部件指针 */ const struct snd_soc_dapm_route *dapm_routes; /* dapm路由指针 */ /* codec wide operations */ int (*set_sysclk)(...); /* 时钟配置函数 */ int (*set_pll)(...); /* 锁相环配置函数 */ /* codec IO */ unsigned int (*read)(...); /* 读取codec寄存器函数 */ int (*write)(...); /* 写入codec寄存器函数 */ int (*volatile_register)(...); /* 用于判定某一寄存器是否是volatile */ int (*readable_register)(...); /* 用于判定某一寄存器是否可读 */ int (*writable_register)(...); /* 用于判定某一寄存器是否可写 */ /* codec bias level */ int (*set_bias_level)(...); /* 偏置电压配置函数 */ };
- /*
- * Digital Audio Interface runtime data.
- *
- * Holds runtime data for a DAI.
- */
- struct snd_soc_dai {
- const char *name; /* dai的名字 */
- struct device *dev; /* 设备指针 */
- /* driver ops */
- struct snd_soc_dai_driver *driver; /* 指向dai驱动结构的指针 */
- /* DAI runtime info */
- unsigned int capture_active:1; /* stream is in use */
- unsigned int playback_active:1; /* stream is in use */
- /* DAI DMA data */
- void *playback_dma_data; /* 用于管理playback dma */
- void *capture_dma_data; /* 用于管理capture dma */
- /* parent platform/codec */
- union {
- struct snd_soc_platform *platform; /* 如果是cpu dai,指向所绑定的平台 */
- struct snd_soc_codec *codec; /* 如果是codec dai指向所绑定的codec */
- };
- struct snd_soc_card *card; /* 指向Machine驱动中的crad实例 */
- };
- /*
- * Digital Audio Interface runtime data.
- *
- * Holds runtime data for a DAI.
- */
- struct snd_soc_dai {
- const char *name; /* dai的名字 */
- struct device *dev; /* 设备指针 */
- /* driver ops */
- struct snd_soc_dai_driver *driver; /* 指向dai驱动结构的指针 */
- /* DAI runtime info */
- unsigned int capture_active:1; /* stream is in use */
- unsigned int playback_active:1; /* stream is in use */
- /* DAI DMA data */
- void *playback_dma_data; /* 用于管理playback dma */
- void *capture_dma_data; /* 用于管理capture dma */
- /* parent platform/codec */
- union {
- struct snd_soc_platform *platform; /* 如果是cpu dai,指向所绑定的平台 */
- struct snd_soc_codec *codec; /* 如果是codec dai指向所绑定的codec */
- };
- struct snd_soc_card *card; /* 指向Machine驱动中的crad实例 */
- };
snd_soc_dai_driver:/* * Digital Audio Interface runtime data. * * Holds runtime data for a DAI. */ struct snd_soc_dai { const char *name; /* dai的名字 */ struct device *dev; /* 设备指针 */ /* driver ops */ struct snd_soc_dai_driver *driver; /* 指向dai驱动结构的指针 */ /* DAI runtime info */ unsigned int capture_active:1; /* stream is in use */ unsigned int playback_active:1; /* stream is in use */ /* DAI DMA data */ void *playback_dma_data; /* 用于管理playback dma */ void *capture_dma_data; /* 用于管理capture dma */ /* parent platform/codec */ union { struct snd_soc_platform *platform; /* 如果是cpu dai,指向所绑定的平台 */ struct snd_soc_codec *codec; /* 如果是codec dai指向所绑定的codec */ }; struct snd_soc_card *card; /* 指向Machine驱动中的crad实例 */ };
- /*
- * Digital Audio Interface Driver.
- *
- * Describes the Digital Audio Interface in terms of its ALSA, DAI and AC97
- * operations and capabilities. Codec and platform drivers will register this
- * structure for every DAI they have.
- *
- * This structure covers the clocking, formating and ALSA operations for each
- * interface.
- */
- struct snd_soc_dai_driver {
- /* DAI description */
- const char *name; /* dai驱动名字 */
- /* DAI driver callbacks */
- int (*probe)(struct snd_soc_dai *dai); /* dai驱动的probe函数,由snd_soc_instantiate_card回调 */
- int (*remove)(struct snd_soc_dai *dai);
- int (*suspend)(struct snd_soc_dai *dai); /* 电源管理 */
- int (*resume)(struct snd_soc_dai *dai);
- /* ops */
- const struct snd_soc_dai_ops *ops; /* 指向本dai的snd_soc_dai_ops结构 */
- /* DAI capabilities */
- struct snd_soc_pcm_stream capture; /* 描述capture的能力 */
- struct snd_soc_pcm_stream playback; /* 描述playback的能力 */
- };
- /*
- * Digital Audio Interface Driver.
- *
- * Describes the Digital Audio Interface in terms of its ALSA, DAI and AC97
- * operations and capabilities. Codec and platform drivers will register this
- * structure for every DAI they have.
- *
- * This structure covers the clocking, formating and ALSA operations for each
- * interface.
- */
- struct snd_soc_dai_driver {
- /* DAI description */
- const char *name; /* dai驱动名字 */
- /* DAI driver callbacks */
- int (*probe)(struct snd_soc_dai *dai); /* dai驱动的probe函数,由snd_soc_instantiate_card回调 */
- int (*remove)(struct snd_soc_dai *dai);
- int (*suspend)(struct snd_soc_dai *dai); /* 电源管理 */
- int (*resume)(struct snd_soc_dai *dai);
- /* ops */
- const struct snd_soc_dai_ops *ops; /* 指向本dai的snd_soc_dai_ops结构 */
- /* DAI capabilities */
- struct snd_soc_pcm_stream capture; /* 描述capture的能力 */
- struct snd_soc_pcm_stream playback; /* 描述playback的能力 */
- };
snd_soc_dai_ops用于实现该dai的控制盒参数配置:/* * Digital Audio Interface Driver. * * Describes the Digital Audio Interface in terms of its ALSA, DAI and AC97 * operations and capabilities. Codec and platform drivers will register this * structure for every DAI they have. * * This structure covers the clocking, formating and ALSA operations for each * interface. */ struct snd_soc_dai_driver { /* DAI description */ const char *name; /* dai驱动名字 */ /* DAI driver callbacks */ int (*probe)(struct snd_soc_dai *dai); /* dai驱动的probe函数,由snd_soc_instantiate_card回调 */ int (*remove)(struct snd_soc_dai *dai); int (*suspend)(struct snd_soc_dai *dai); /* 电源管理 */ int (*resume)(struct snd_soc_dai *dai); /* ops */ const struct snd_soc_dai_ops *ops; /* 指向本dai的snd_soc_dai_ops结构 */ /* DAI capabilities */ struct snd_soc_pcm_stream capture; /* 描述capture的能力 */ struct snd_soc_pcm_stream playback; /* 描述playback的能力 */ };
- struct snd_soc_dai_ops {
- /*
- * DAI clocking configuration, all optional.
- * Called by soc_card drivers, normally in their hw_params.
- */
- int (*set_sysclk)(...);
- int (*set_pll)(...);
- int (*set_clkdiv)(...);
- /*
- * DAI format configuration
- * Called by soc_card drivers, normally in their hw_params.
- */
- int (*set_fmt)(...);
- int (*set_tdm_slot)(...);
- int (*set_channel_map)(...);
- int (*set_tristate)(...);
- /*
- * DAI digital mute - optional.
- * Called by soc-core to minimise any pops.
- */
- int (*digital_mute)(...);
- /*
- * ALSA PCM audio operations - all optional.
- * Called by soc-core during audio PCM operations.
- */
- int (*startup)(...);
- void (*shutdown)(...);
- int (*hw_params)(...);
- int (*hw_free)(...);
- int (*prepare)(...);
- int (*trigger)(...);
- /*
- * For hardware based FIFO caused delay reporting.
- * Optional.
- */
- snd_pcm_sframes_t (*delay)(...);
- };
- struct snd_soc_dai_ops {
- /*
- * DAI clocking configuration, all optional.
- * Called by soc_card drivers, normally in their hw_params.
- */
- int (*set_sysclk)(...);
- int (*set_pll)(...);
- int (*set_clkdiv)(...);
- /*
- * DAI format configuration
- * Called by soc_card drivers, normally in their hw_params.
- */
- int (*set_fmt)(...);
- int (*set_tdm_slot)(...);
- int (*set_channel_map)(...);
- int (*set_tristate)(...);
- /*
- * DAI digital mute - optional.
- * Called by soc-core to minimise any pops.
- */
- int (*digital_mute)(...);
- /*
- * ALSA PCM audio operations - all optional.
- * Called by soc-core during audio PCM operations.
- */
- int (*startup)(...);
- void (*shutdown)(...);
- int (*hw_params)(...);
- int (*hw_free)(...);
- int (*prepare)(...);
- int (*trigger)(...);
- /*
- * For hardware based FIFO caused delay reporting.
- * Optional.
- */
- snd_pcm_sframes_t (*delay)(...);
- };
struct snd_soc_dai_ops { /* * DAI clocking configuration, all optional. * Called by soc_card drivers, normally in their hw_params. */ int (*set_sysclk)(...); int (*set_pll)(...); int (*set_clkdiv)(...); /* * DAI format configuration * Called by soc_card drivers, normally in their hw_params. */ int (*set_fmt)(...); int (*set_tdm_slot)(...); int (*set_channel_map)(...); int (*set_tristate)(...); /* * DAI digital mute - optional. * Called by soc-core to minimise any pops. */ int (*digital_mute)(...); /* * ALSA PCM audio operations - all optional. * Called by soc-core during audio PCM operations. */ int (*startup)(...); void (*shutdown)(...); int (*hw_params)(...); int (*hw_free)(...); int (*prepare)(...); int (*trigger)(...); /* * For hardware based FIFO caused delay reporting. * Optional. */ snd_pcm_sframes_t (*delay)(...); };3. Codec的注册
因为Codec驱动的代码要做到平台无关性,要使得Machine驱动能够使用该Codec,Codec驱动的首要任务就是确定snd_soc_codec和snd_soc_dai的实例,并把它们注册到系统中,注册后的codec和dai才能为Machine驱动所用。以WM8994为例,对应的代码位置:/sound/soc/codecs/wm8994.c,模块的入口函数注册了一个platform driver:
- static struct platform_driver wm8994_codec_driver = {
- .driver = {
- .name = "wm8994-codec",
- .owner = THIS_MODULE,
- },
- .probe = wm8994_probe,
- .remove = __devexit_p(wm8994_remove),
- };
- module_platform_driver(wm8994_codec_driver);
- static struct platform_driver wm8994_codec_driver = {
- .driver = {
- .name = "wm8994-codec",
- .owner = THIS_MODULE,
- },
- .probe = wm8994_probe,
- .remove = __devexit_p(wm8994_remove),
- };
- module_platform_driver(wm8994_codec_driver);
有platform driver,必定会有相应的platform device,这个platform device的来源后面再说,显然,platform driver注册后,probe回调将会被调用,这里是wm8994_probe函数:static struct platform_driver wm8994_codec_driver = { .driver = { .name = "wm8994-codec", .owner = THIS_MODULE, }, .probe = wm8994_probe, .remove = __devexit_p(wm8994_remove), }; module_platform_driver(wm8994_codec_driver);
- static int __devinit wm8994_probe(struct platform_device *pdev)
- {
- return snd_soc_register_codec(&pdev->dev, &soc_codec_dev_wm8994,
- wm8994_dai, ARRAY_SIZE(wm8994_dai));
- }
- static int __devinit wm8994_probe(struct platform_device *pdev)
- {
- return snd_soc_register_codec(&pdev->dev, &soc_codec_dev_wm8994,
- wm8994_dai, ARRAY_SIZE(wm8994_dai));
- }
其中,soc_codec_dev_wm8994和wm8994_dai的定义如下(代码中定义了3个dai,这里只列出第一个):static int __devinit wm8994_probe(struct platform_device *pdev) { return snd_soc_register_codec(&pdev->dev, &soc_codec_dev_wm8994, wm8994_dai, ARRAY_SIZE(wm8994_dai)); }
- static struct snd_soc_codec_driver soc_codec_dev_wm8994 = {
- .probe = wm8994_codec_probe,
- .remove = wm8994_codec_remove,
- .suspend = wm8994_suspend,
- .resume = wm8994_resume,
- .set_bias_level = wm8994_set_bias_level,
- .reg_cache_size = WM8994_MAX_REGISTER,
- .volatile_register = wm8994_soc_volatile,
- };
- static struct snd_soc_codec_driver soc_codec_dev_wm8994 = {
- .probe = wm8994_codec_probe,
- .remove = wm8994_codec_remove,
- .suspend = wm8994_suspend,
- .resume = wm8994_resume,
- .set_bias_level = wm8994_set_bias_level,
- .reg_cache_size = WM8994_MAX_REGISTER,
- .volatile_register = wm8994_soc_volatile,
- };
static struct snd_soc_codec_driver soc_codec_dev_wm8994 = { .probe = wm8994_codec_probe, .remove = wm8994_codec_remove, .suspend = wm8994_suspend, .resume = wm8994_resume, .set_bias_level = wm8994_set_bias_level, .reg_cache_size = WM8994_MAX_REGISTER, .volatile_register = wm8994_soc_volatile, };
- static struct snd_soc_dai_driver wm8994_dai[] = {
- {
- .name = "wm8994-aif1",
- .id = 1,
- .playback = {
- .stream_name = "AIF1 Playback",
- .channels_min = 1,
- .channels_max = 2,
- .rates = WM8994_RATES,
- .formats = WM8994_FORMATS,
- },
- .capture = {
- .stream_name = "AIF1 Capture",
- .channels_min = 1,
- .channels_max = 2,
- .rates = WM8994_RATES,
- .formats = WM8994_FORMATS,
- },
- .ops = &wm8994_aif1_dai_ops,
- },
- ......
- }
- static struct snd_soc_dai_driver wm8994_dai[] = {
- {
- .name = "wm8994-aif1",
- .id = 1,
- .playback = {
- .stream_name = "AIF1 Playback",
- .channels_min = 1,
- .channels_max = 2,
- .rates = WM8994_RATES,
- .formats = WM8994_FORMATS,
- },
- .capture = {
- .stream_name = "AIF1 Capture",
- .channels_min = 1,
- .channels_max = 2,
- .rates = WM8994_RATES,
- .formats = WM8994_FORMATS,
- },
- .ops = &wm8994_aif1_dai_ops,
- },
- ......
- }
可见,Codec驱动的第一个步骤就是定义snd_soc_codec_driver和snd_soc_dai_driver的实例,然后调用 snd_soc_register_codec函数对Codec进行注册。进入snd_soc_register_codec函数看看:static struct snd_soc_dai_driver wm8994_dai[] = { { .name = "wm8994-aif1", .id = 1, .playback = { .stream_name = "AIF1 Playback", .channels_min = 1, .channels_max = 2, .rates = WM8994_RATES, .formats = WM8994_FORMATS, }, .capture = { .stream_name = "AIF1 Capture", .channels_min = 1, .channels_max = 2, .rates = WM8994_RATES, .formats = WM8994_FORMATS, }, .ops = &wm8994_aif1_dai_ops, }, ...... }首先,它申请了一个snd_soc_codec结构的实例:
- codec = kzalloc(sizeof(struct snd_soc_codec), GFP_KERNEL);
- codec = kzalloc(sizeof(struct snd_soc_codec), GFP_KERNEL);
确定codec的名字,这个名字很重要,Machine驱动定义的snd_soc_dai_link中会指定每个link的codec和dai的名字,进行匹配绑定时就是通过和这里的名字比较,从而找到该Codec的!codec = kzalloc(sizeof(struct snd_soc_codec), GFP_KERNEL);
- /* create CODEC component name */
- codec->name = fmt_single_name(dev, &codec->id);
- /* create CODEC component name */
- codec->name = fmt_single_name(dev, &codec->id);
/* create CODEC component name */ codec->name = fmt_single_name(dev, &codec->id);然后初始化它的各个字段,多数字段的值来自上面定义的snd_soc_codec_driver的实例 soc_codec_dev_wm8994:
- codec->write = codec_drv->write;
- codec->read = codec_drv->read;
- codec->volatile_register = codec_drv->volatile_register;
- codec->readable_register = codec_drv->readable_register;
- codec->writable_register = codec_drv->writable_register;
- codec->dapm.bias_level = SND_SOC_BIAS_OFF;
- codec->dapm.dev = dev;
- codec->dapm.codec = codec;
- codec->dapm.seq_notifier = codec_drv->seq_notifier;
- codec->dapm.stream_event = codec_drv->stream_event;
- codec->dev = dev;
- codec->driver = codec_drv;
- codec->num_dai = num_dai;
- codec->write = codec_drv->write;
- codec->read = codec_drv->read;
- codec->volatile_register = codec_drv->volatile_register;
- codec->readable_register = codec_drv->readable_register;
- codec->writable_register = codec_drv->writable_register;
- codec->dapm.bias_level = SND_SOC_BIAS_OFF;
- codec->dapm.dev = dev;
- codec->dapm.codec = codec;
- codec->dapm.seq_notifier = codec_drv->seq_notifier;
- codec->dapm.stream_event = codec_drv->stream_event;
- codec->dev = dev;
- codec->driver = codec_drv;
- codec->num_dai = num_dai;
在做了一些寄存器缓存的初始化和配置工作后,通过 snd_soc_register_dais函数 对本Codec的dai进行注册:codec->write = codec_drv->write; codec->read = codec_drv->read; codec->volatile_register = codec_drv->volatile_register; codec->readable_register = codec_drv->readable_register; codec->writable_register = codec_drv->writable_register; codec->dapm.bias_level = SND_SOC_BIAS_OFF; codec->dapm.dev = dev; codec->dapm.codec = codec; codec->dapm.seq_notifier = codec_drv->seq_notifier; codec->dapm.stream_event = codec_drv->stream_event; codec->dev = dev; codec->driver = codec_drv; codec->num_dai = num_dai;
- /* register any DAIs */
- if (num_dai) {
- ret = snd_soc_register_dais(dev, dai_drv, num_dai);
- if (ret < 0)
- goto fail;
- }
- /* register any DAIs */
- if (num_dai) {
- ret = snd_soc_register_dais(dev, dai_drv, num_dai);
- if (ret < 0)
- goto fail;
- }
最后,它把codec实例链接到全局链表codec_list中,并且调用snd_soc_instantiate_cards是函数触发Machine驱动进行一次匹配绑定操作:/* register any DAIs */ if (num_dai) { ret = snd_soc_register_dais(dev, dai_drv, num_dai); if (ret < 0) goto fail; }
- list_add(&codec->list, &codec_list);
- snd_soc_instantiate_cards();
- list_add(&codec->list, &codec_list);
- snd_soc_instantiate_cards();
上面的 snd_soc_register_dais函数其实也是和snd_soc_register_codec类似,显示为每个snd_soc_dai实例分配内存,确定dai的名字,用snd_soc_dai_driver实例的字段对它进行必要初始化,最后把该dai链接到全局链表dai_list中,和Codec一样,最后也会调用snd_soc_instantiate_cards函数触发一次匹配绑定的操作。list_add(&codec->list, &codec_list); snd_soc_instantiate_cards();
图3.1 dai的注册关于snd_soc_instantiate_cards函数,请参阅另一篇博文:Linux音频驱动之六:ASoC架构中的Machine。4. mfd设备
前面已经提到,codec驱动把自己注册为一个platform driver,那对应的platform device在哪里定义?答案是在以下代码文件中:/drivers/mfd/wm8994-core.c。
WM8994本身具备多种功能,除了codec外,它还有作为LDO和GPIO使用,这几种功能共享一些IO和中断资源,linux为这种设备提供了一套标准的实现方法:mfd设备。其基本思想是为这些功能的公共部分实现一个父设备,以便共享某些系统资源和功能,然后每个子功能实现为它的子设备,这样既共享了资源和代码,又能实现合理的设备层次结构,主要利用到的API就是:mfd_add_devices(),mfd_remove_devices(),mfd_cell_enable(),mfd_cell_disable(),mfd_clone_cell()。
回到wm8994-core.c中,因为WM8994使用I2C进行内部寄存器的存取,它首先注册了一个I2C驱动:
- static struct i2c_driver wm8994_i2c_driver = {
- .driver = {
- .name = "wm8994",
- .owner = THIS_MODULE,
- .pm = &wm8994_pm_ops,
- .of_match_table = wm8994_of_match,
- },
- .probe = wm8994_i2c_probe,
- .remove = wm8994_i2c_remove,
- .id_table = wm8994_i2c_id,
- };
- static int __init wm8994_i2c_init(void)
- {
- int ret;
- ret = i2c_add_driver(&wm8994_i2c_driver);
- if (ret != 0)
- pr_err("Failed to register wm8994 I2C driver: %d\n", ret);
- return ret;
- }
- module_init(wm8994_i2c_init);
- static struct i2c_driver wm8994_i2c_driver = {
- .driver = {
- .name = "wm8994",
- .owner = THIS_MODULE,
- .pm = &wm8994_pm_ops,
- .of_match_table = wm8994_of_match,
- },
- .probe = wm8994_i2c_probe,
- .remove = wm8994_i2c_remove,
- .id_table = wm8994_i2c_id,
- };
- static int __init wm8994_i2c_init(void)
- {
- int ret;
- ret = i2c_add_driver(&wm8994_i2c_driver);
- if (ret != 0)
- pr_err("Failed to register wm8994 I2C driver: %d\n", ret);
- return ret;
- }
- module_init(wm8994_i2c_init);
static struct i2c_driver wm8994_i2c_driver = { .driver = { .name = "wm8994", .owner = THIS_MODULE, .pm = &wm8994_pm_ops, .of_match_table = wm8994_of_match, }, .probe = wm8994_i2c_probe, .remove = wm8994_i2c_remove, .id_table = wm8994_i2c_id, }; static int __init wm8994_i2c_init(void) { int ret; ret = i2c_add_driver(&wm8994_i2c_driver); if (ret != 0) pr_err("Failed to register wm8994 I2C driver: %d\n", ret); return ret; } module_init(wm8994_i2c_init);进入wm8994_i2c_probe()函数,它先申请了一个wm8994结构的变量,该变量被作为这个I2C设备的driver_data使用,上面已经讲过,codec作为它的子设备,将会取出并使用这个driver_data。接下来,本函数利用regmap_init_i2c()初始化并获得一个regmap结构,该结构主要用于后续基于regmap机制的寄存器I/O,关于regmap我们留在后面再讲。最后,通过wm8994_device_init()来添加mfd子设备:
- static int wm8994_i2c_probe(struct i2c_client *i2c,
- const struct i2c_device_id *id)
- {
- struct wm8994 *wm8994;
- int ret;
- wm8994 = devm_kzalloc(&i2c->dev, sizeof(struct wm8994), GFP_KERNEL);
- i2c_set_clientdata(i2c, wm8994);
- wm8994->dev = &i2c->dev;
- wm8994->irq = i2c->irq;
- wm8994->type = id->driver_data;
- wm8994->regmap = regmap_init_i2c(i2c, &wm8994_base_regmap_config);
- return wm8994_device_init(wm8994, i2c->irq);
- }
- static int wm8994_i2c_probe(struct i2c_client *i2c,
- const struct i2c_device_id *id)
- {
- struct wm8994 *wm8994;
- int ret;
- wm8994 = devm_kzalloc(&i2c->dev, sizeof(struct wm8994), GFP_KERNEL);
- i2c_set_clientdata(i2c, wm8994);
- wm8994->dev = &i2c->dev;
- wm8994->irq = i2c->irq;
- wm8994->type = id->driver_data;
- wm8994->regmap = regmap_init_i2c(i2c, &wm8994_base_regmap_config);
- return wm8994_device_init(wm8994, i2c->irq);
- }
继续进入wm8994_device_init()函数,它首先为两个LDO添加mfd子设备:static int wm8994_i2c_probe(struct i2c_client *i2c, const struct i2c_device_id *id) { struct wm8994 *wm8994; int ret; wm8994 = devm_kzalloc(&i2c->dev, sizeof(struct wm8994), GFP_KERNEL); i2c_set_clientdata(i2c, wm8994); wm8994->dev = &i2c->dev; wm8994->irq = i2c->irq; wm8994->type = id->driver_data; wm8994->regmap = regmap_init_i2c(i2c, &wm8994_base_regmap_config); return wm8994_device_init(wm8994, i2c->irq); }
- /* Add the on-chip regulators first for bootstrapping */
- ret = mfd_add_devices(wm8994->dev, -1,
- wm8994_regulator_devs,
- ARRAY_SIZE(wm8994_regulator_devs),
- NULL, 0);
- /* Add the on-chip regulators first for bootstrapping */
- ret = mfd_add_devices(wm8994->dev, -1,
- wm8994_regulator_devs,
- ARRAY_SIZE(wm8994_regulator_devs),
- NULL, 0);
因为WM1811,WM8994,WM8958三个芯片功能类似,因此这三个芯片都使用了WM8994的代码,所以 wm8994_device_init()接下来根据不同的芯片型号做了一些初始化动作,这部分的代码就不贴了。接着,从platform_data中获得部分配置信息:/* Add the on-chip regulators first for bootstrapping */ ret = mfd_add_devices(wm8994->dev, -1, wm8994_regulator_devs, ARRAY_SIZE(wm8994_regulator_devs), NULL, 0);
- if (pdata) {
- wm8994->irq_base = pdata->irq_base;
- wm8994->gpio_base = pdata->gpio_base;
- /* GPIO configuration is only applied if it's non-zero */
- ......
- }
- if (pdata) {
- wm8994->irq_base = pdata->irq_base;
- wm8994->gpio_base = pdata->gpio_base;
- /* GPIO configuration is only applied if it's non-zero */
- ......
- }
最后,初始化irq,然后添加codec子设备和gpio子设备:if (pdata) { wm8994->irq_base = pdata->irq_base; wm8994->gpio_base = pdata->gpio_base; /* GPIO configuration is only applied if it's non-zero */ ...... }
- wm8994_irq_init(wm8994);
- ret = mfd_add_devices(wm8994->dev, -1,
- wm8994_devs, ARRAY_SIZE(wm8994_devs),
- NULL, 0);
- wm8994_irq_init(wm8994);
- ret = mfd_add_devices(wm8994->dev, -1,
- wm8994_devs, ARRAY_SIZE(wm8994_devs),
- NULL, 0);
经过以上这些处理后,作为父设备的I2C设备已经准备就绪,它的下面挂着4个子设备:ldo-0,ldo-1,codec,gpio。其中,codec子设备的加入,它将会和前面所讲codec的platform driver匹配,触发probe回调完成下面所说的codec驱动的初始化工作。wm8994_irq_init(wm8994); ret = mfd_add_devices(wm8994->dev, -1, wm8994_devs, ARRAY_SIZE(wm8994_devs), NULL, 0);5. Codec初始化
Machine驱动的初始化,codec和dai的注册,都会调用snd_soc_instantiate_cards()进行一次声卡和codec,dai,platform的匹配绑定过程,这里所说的绑定,正如Machine驱动一文中所描述,就是通过3个全局链表,按名字进行匹配,把匹配的codec,dai和platform实例赋值给声卡每对dai的snd_soc_pcm_runtime变量中。一旦绑定成功,将会使得codec和dai驱动的probe回调被调用,codec的初始化工作就在该回调中完成。对于WM8994,该回调就是wm8994_codec_probe函数:
图5.1 wm8994_codec_probe
- 取出父设备的driver_data,其实就是上一节的wm8994结构变量,取出其中的regmap字段,复制到codec的control_data字段中;
- 申请一个wm8994_priv私有数据结构,并把它设为codec设备的driver_data;
- 通过snd_soc_codec_set_cache_io初始化regmap io,完成这一步后,就可以使用API:snd_soc_read(),snd_soc_write()对codec的寄存器进行读写了;
- 把父设备的driver_data(struct wm8994)和platform_data保存到私有结构wm8994_priv中;
- 因为要同时支持3个芯片型号,这里要根据芯片的型号做一些特定的初始化工作;
- 申请必要的几个中断;
- 设置合适的偏置电平;
- 通过snd_soc_update_bits修改某些寄存器;
- 根据父设备的platform_data,完成特定于平台的初始化配置;
- 添加必要的control,dapm部件进而dapm路由信息;
至此,codec驱动的初始化完成。
5. regmap-io
我们知道,要想对codec进行控制,通常都是通过读写它的内部寄存器完成的,读写的接口通常是I2C或者是SPI接口,不过每个codec芯片寄存器的比特位组成都有所不同,寄存器地址的比特位也有所不同。例如WM8753的寄存器地址是7bits,数据是9bits,WM8993的寄存器地址是8bits,数据也是16bits,而WM8994的寄存器地址是16bits,数据也是16bits。在kernel3.1版本,内核引入了一套regmap机制和相关的API,这样就可以用统一的操作来实现对这些多样的寄存器的控制。regmap使用起来也相对简单:完成以上步骤后,codec驱动就可以使用诸如snd_soc_read、snd_soc_write、snd_soc_update_bits等API对codec的寄存器进行读写了。
- 为codec定义一个regmap_config结构实例,指定codec寄存器的地址和数据位等信息;
- 根据codec的控制总线类型,调用以下其中一个函数,得到一个指向regmap结构的指针:
- struct regmap *regmap_init_i2c(struct i2c_client *i2c, const struct regmap_config *config);
- struct regmap *regmap_init_spi(struct spi_device *dev, const struct regmap_config *config);
- 把获得的regmap结构指针赋值给codec->control_data;
- 调用soc-io的api:snd_soc_codec_set_cache_io使得soc-io和regmap进行关联;
前面几章内容已经说过,ASoC被分为Machine,Platform和Codec三大部件,Platform驱动的主要作用是完成音频数据的管理,最终通过CPU的数字音频接口(DAI)把音频数据传送给Codec进行处理,最终由Codec输出驱动耳机或者是喇叭的音信信号。在具体实现上,ASoC有把Platform驱动分为两个部分:snd_soc_platform_driver和snd_soc_dai_driver。其中,platform_driver负责管理音频数据,把音频数据通过dma或其他操作传送至cpu dai中,dai_driver则主要完成cpu一侧的dai的参数配置,同时也会通过一定的途径把必要的dma等参数与snd_soc_platform_driver进行交互。/*****************************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!
/*****************************************************************************************************/
2. snd_soc_platform_driver的注册
通常,ASoC把snd_soc_platform_driver注册为一个系统的platform_driver,不要被这两个相像的术语所迷惑,前者只是针对ASoC子系统的,后者是来自Linux的设备驱动模型。我们要做的就是:以kernel3.3中的/sound/soc/samsung/dma.c为例:
- 定义一个snd_soc_platform_driver结构的实例;
- 在platform_driver的probe回调中利用ASoC的API:snd_soc_register_platform()注册上面定义的实例;
- 实现snd_soc_platform_driver中的各个回调函数;
- static struct snd_soc_platform_driver samsung_asoc_platform = {
- .ops = &dma_ops,
- .pcm_new = dma_new,
- .pcm_free = dma_free_dma_buffers,
- };
- static int __devinit samsung_asoc_platform_probe(struct platform_device *pdev)
- {
- return snd_soc_register_platform(&pdev->dev, &samsung_asoc_platform);
- }
- static int __devexit samsung_asoc_platform_remove(struct platform_device *pdev)
- {
- snd_soc_unregister_platform(&pdev->dev);
- return 0;
- }
- static struct platform_driver asoc_dma_driver = {
- .driver = {
- .name = "samsung-audio",
- .owner = THIS_MODULE,
- },
- .probe = samsung_asoc_platform_probe,
- .remove = __devexit_p(samsung_asoc_platform_remove),
- };
- module_platform_driver(asoc_dma_driver);
- static struct snd_soc_platform_driver samsung_asoc_platform = {
- .ops = &dma_ops,
- .pcm_new = dma_new,
- .pcm_free = dma_free_dma_buffers,
- };
- static int __devinit samsung_asoc_platform_probe(struct platform_device *pdev)
- {
- return snd_soc_register_platform(&pdev->dev, &samsung_asoc_platform);
- }
- static int __devexit samsung_asoc_platform_remove(struct platform_device *pdev)
- {
- snd_soc_unregister_platform(&pdev->dev);
- return 0;
- }
- static struct platform_driver asoc_dma_driver = {
- .driver = {
- .name = "samsung-audio",
- .owner = THIS_MODULE,
- },
- .probe = samsung_asoc_platform_probe,
- .remove = __devexit_p(samsung_asoc_platform_remove),
- };
- module_platform_driver(asoc_dma_driver);
snd_soc_register_platform() 该函数用于注册一个snd_soc_platform,只有注册以后,它才可以被Machine驱动使用。它的代码已经清晰地表达了它的实现过程:static struct snd_soc_platform_driver samsung_asoc_platform = { .ops = &dma_ops, .pcm_new = dma_new, .pcm_free = dma_free_dma_buffers, }; static int __devinit samsung_asoc_platform_probe(struct platform_device *pdev) { return snd_soc_register_platform(&pdev->dev, &samsung_asoc_platform); } static int __devexit samsung_asoc_platform_remove(struct platform_device *pdev) { snd_soc_unregister_platform(&pdev->dev); return 0; } static struct platform_driver asoc_dma_driver = { .driver = { .name = "samsung-audio", .owner = THIS_MODULE, }, .probe = samsung_asoc_platform_probe, .remove = __devexit_p(samsung_asoc_platform_remove), }; module_platform_driver(asoc_dma_driver);
- 为snd_soc_platform实例申请内存;
- 从platform_device中获得它的名字,用于Machine驱动的匹配工作;
- 初始化snd_soc_platform的字段;
- 把snd_soc_platform实例连接到全局链表platform_list中;
- 调用snd_soc_instantiate_cards,触发声卡的machine、platform、codec、dai等的匹配工作;
3. cpu的snd_soc_dai driver驱动的注册
dai驱动通常对应cpu的一个或几个I2S/PCM接口,与snd_soc_platform一样,dai驱动也是实现为一个platform driver,实现一个dai驱动大致可以分为以下几个步骤:
- 定义一个snd_soc_dai_driver结构的实例;
- 在对应的platform_driver中的probe回调中通过API:snd_soc_register_dai或者snd_soc_register_dais,注册snd_soc_dai实例;
- 实现snd_soc_dai_driver结构中的probe、suspend等回调;
- 实现snd_soc_dai_driver结构中的snd_soc_dai_ops字段中的回调函数;
snd_soc_register_dai 这个函数在上一篇介绍codec驱动的博文中已有介绍,请参考:Linux ALSA声卡驱动之七:ASoC架构中的Codec。
snd_soc_dai 该结构在snd_soc_register_dai函数中通过动态内存申请获得, 简要介绍一下几个重要字段:
- driver 指向关联的snd_soc_dai_driver结构,由注册时通过参数传入;
- playback_dma_data 用于保存该dai播放stream的dma信息,例如dma的目标地址,dma传送单元大小和通道号等;
- capture_dma_data 同上,用于录音stream;
- platform 指向关联的snd_soc_platform结构;
snd_soc_dai_driver 该结构需要自己根据不同的soc芯片进行定义,关键字段介绍如下:
- probe、remove 回调函数,分别在声卡加载和卸载时被调用;
- ops 指向snd_soc_dai_ops结构,用于配置和控制该dai;
- playback snd_soc_pcm_stream结构,用于指出该dai支持的声道数,码率,数据格式等能力;
- capture snd_soc_pcm_stream结构,用于指出该dai支持的声道数,码率,数据格式等能力;
4. snd_soc_dai_driver中的ops字段
ops字段指向一个snd_soc_dai_ops结构,该结构实际上是一组回调函数的集合,dai的配置和控制几乎都是通过这些回调函数来实现的,这些回调函数基本可以分为3大类,驱动程序可以根据实际情况实现其中的一部分:
工作时钟配置函数 通常由machine驱动调用:
标准的snd_soc_ops回调 通常由soc-core在进行PCM操作时调用:
抗pop,pop声 由soc-core调用:
以下这些api通常被machine驱动使用,machine驱动在他的snd_pcm_ops字段中的hw_params回调中使用这些api:
- snd_soc_dai_set_fmt() 实际上会调用snd_soc_dai_ops或者codec driver中的set_fmt回调;
- snd_soc_dai_set_pll() 实际上会调用snd_soc_dai_ops或者codec driver中的set_pll回调;
- snd_soc_dai_set_sysclk() 实际上会调用snd_soc_dai_ops或者codec driver中的set_sysclk回调;
- snd_soc_dai_set_clkdiv() 实际上会调用snd_soc_dai_ops或者codec driver中的set_clkdiv回调;
snd_soc_dai_set_fmt(struct snd_soc_dai *dai, unsigned int fmt)的第二个参数fmt在这里特别说一下,ASoC目前只是用了它的低16位,并且为它专门定义了一些宏来方便我们使用:
bit 0-3 用于设置接口的格式:
- #define SND_SOC_DAIFMT_I2S 1 /* I2S mode */
- #define SND_SOC_DAIFMT_RIGHT_J 2 /* Right Justified mode */
- #define SND_SOC_DAIFMT_LEFT_J 3 /* Left Justified mode */
- #define SND_SOC_DAIFMT_DSP_A 4 /* L data MSB after FRM LRC */
- #define SND_SOC_DAIFMT_DSP_B 5 /* L data MSB during FRM LRC */
- #define SND_SOC_DAIFMT_AC97 6 /* AC97 */
- #define SND_SOC_DAIFMT_PDM 7 /* Pulse density modulation */
- #define SND_SOC_DAIFMT_I2S 1 /* I2S mode */
- #define SND_SOC_DAIFMT_RIGHT_J 2 /* Right Justified mode */
- #define SND_SOC_DAIFMT_LEFT_J 3 /* Left Justified mode */
- #define SND_SOC_DAIFMT_DSP_A 4 /* L data MSB after FRM LRC */
- #define SND_SOC_DAIFMT_DSP_B 5 /* L data MSB during FRM LRC */
- #define SND_SOC_DAIFMT_AC97 6 /* AC97 */
- #define SND_SOC_DAIFMT_PDM 7 /* Pulse density modulation */
#define SND_SOC_DAIFMT_I2S 1 /* I2S mode */ #define SND_SOC_DAIFMT_RIGHT_J 2 /* Right Justified mode */ #define SND_SOC_DAIFMT_LEFT_J 3 /* Left Justified mode */ #define SND_SOC_DAIFMT_DSP_A 4 /* L data MSB after FRM LRC */ #define SND_SOC_DAIFMT_DSP_B 5 /* L data MSB during FRM LRC */ #define SND_SOC_DAIFMT_AC97 6 /* AC97 */ #define SND_SOC_DAIFMT_PDM 7 /* Pulse density modulation */bit 4-7 用于设置接口时钟的开关特性:
- #define SND_SOC_DAIFMT_CONT (1 << 4) /* continuous clock */
- #define SND_SOC_DAIFMT_GATED (2 << 4) /* clock is gated */
- #define SND_SOC_DAIFMT_CONT (1 << 4) /* continuous clock */
- #define SND_SOC_DAIFMT_GATED (2 << 4) /* clock is gated */
#define SND_SOC_DAIFMT_CONT (1 << 4) /* continuous clock */ #define SND_SOC_DAIFMT_GATED (2 << 4) /* clock is gated */bit 8-11 用于设置接口时钟的相位:
- #define SND_SOC_DAIFMT_NB_NF (1 << 8) /* normal bit clock + frame */
- #define SND_SOC_DAIFMT_NB_IF (2 << 8) /* normal BCLK + inv FRM */
- #define SND_SOC_DAIFMT_IB_NF (3 << 8) /* invert BCLK + nor FRM */
- #define SND_SOC_DAIFMT_IB_IF (4 << 8) /* invert BCLK + FRM */
- #define SND_SOC_DAIFMT_NB_NF (1 << 8) /* normal bit clock + frame */
- #define SND_SOC_DAIFMT_NB_IF (2 << 8) /* normal BCLK + inv FRM */
- #define SND_SOC_DAIFMT_IB_NF (3 << 8) /* invert BCLK + nor FRM */
- #define SND_SOC_DAIFMT_IB_IF (4 << 8) /* invert BCLK + FRM */
#define SND_SOC_DAIFMT_NB_NF (1 << 8) /* normal bit clock + frame */ #define SND_SOC_DAIFMT_NB_IF (2 << 8) /* normal BCLK + inv FRM */ #define SND_SOC_DAIFMT_IB_NF (3 << 8) /* invert BCLK + nor FRM */ #define SND_SOC_DAIFMT_IB_IF (4 << 8) /* invert BCLK + FRM */bit 12-15 用于设置接口主从格式:
- #define SND_SOC_DAIFMT_CBM_CFM (1 << 12) /* codec clk & FRM master */
- #define SND_SOC_DAIFMT_CBS_CFM (2 << 12) /* codec clk slave & FRM master */
- #define SND_SOC_DAIFMT_CBM_CFS (3 << 12) /* codec clk master & frame slave */
- #define SND_SOC_DAIFMT_CBS_CFS (4 << 12) /* codec clk & FRM slave */
- #define SND_SOC_DAIFMT_CBM_CFM (1 << 12) /* codec clk & FRM master */
- #define SND_SOC_DAIFMT_CBS_CFM (2 << 12) /* codec clk slave & FRM master */
- #define SND_SOC_DAIFMT_CBM_CFS (3 << 12) /* codec clk master & frame slave */
- #define SND_SOC_DAIFMT_CBS_CFS (4 << 12) /* codec clk & FRM slave */
#define SND_SOC_DAIFMT_CBM_CFM (1 << 12) /* codec clk & FRM master */ #define SND_SOC_DAIFMT_CBS_CFM (2 << 12) /* codec clk slave & FRM master */ #define SND_SOC_DAIFMT_CBM_CFS (3 << 12) /* codec clk master & frame slave */ #define SND_SOC_DAIFMT_CBS_CFS (4 << 12) /* codec clk & FRM slave */5. snd_soc_platform_driver中的ops字段
该ops字段是一个snd_pcm_ops结构,实现该结构中的各个回调函数是soc platform驱动的主要工作,他们基本都涉及dma操作以及dma buffer的管理等工作。下面介绍几个重要的回调函数:
ops.open
当应用程序打开一个pcm设备时,该函数会被调用,通常,该函数会使用snd_soc_set_runtime_hwparams()设置substream中的snd_pcm_runtime结构里面的hw_params相关字段,然后为snd_pcm_runtime的private_data字段申请一个私有结构,用于保存该平台的dma参数。
ops.hw_params
驱动的hw_params阶段,该函数会被调用。通常,该函数会通过snd_soc_dai_get_dma_data函数获得对应的dai的dma参数,获得的参数一般都会保存在snd_pcm_runtime结构的private_data字段。然后通过snd_pcm_set_runtime_buffer函数设置snd_pcm_runtime结构中的dma buffer的地址和大小等参数。要注意的是,该回调可能会被多次调用,具体实现时要小心处理多次申请资源的问题。
ops.prepare
正式开始数据传送之前会调用该函数,该函数通常会完成dma操作的必要准备工作。
ops.trigger
数据传送的开始,暂停,恢复和停止时,该函数会被调用。
ops.pointer
该函数返回传送数据的当前位置。
6. 音频数据的dma操作
soc-platform驱动的最主要功能就是要完成音频数据的传送,大多数情况下,音频数据都是通过dma来完成的。
6.1. 申请dma buffer
因为dma的特殊性,dma buffer是一块特殊的内存,比如有的平台规定只有某段地址范围的内存才可以进行dma操作,而多数嵌入式平台还要求dma内存的物理地址是连续的,以方便dma控制器对内存的访问。在ASoC架构中,dma buffer的信息保存在snd_pcm_substream结构的snd_dma_buffer *buf字段中,它的定义如下
- struct snd_dma_buffer {
- struct snd_dma_device dev; /* device type */
- unsigned char *area; /* virtual pointer */
- dma_addr_t addr; /* physical address */
- size_t bytes; /* buffer size in bytes */
- void *private_data; /* private for allocator; don't touch */
- };
- struct snd_dma_buffer {
- struct snd_dma_device dev; /* device type */
- unsigned char *area; /* virtual pointer */
- dma_addr_t addr; /* physical address */
- size_t bytes; /* buffer size in bytes */
- void *private_data; /* private for allocator; don't touch */
- };
struct snd_dma_buffer { struct snd_dma_device dev; /* device type */ unsigned char *area; /* virtual pointer */ dma_addr_t addr; /* physical address */ size_t bytes; /* buffer size in bytes */ void *private_data; /* private for allocator; don't touch */ };那么,在哪里完成了snd_dam_buffer结构的初始化赋值操作呢?答案就在snd_soc_platform_driver的pcm_new回调函数中,还是以/sound/soc/samsung/dma.c为例:
- static struct snd_soc_platform_driver samsung_asoc_platform = {
- .ops = &dma_ops,
- .pcm_new = dma_new,
- .pcm_free = dma_free_dma_buffers,
- };
- static int __devinit samsung_asoc_platform_probe(struct platform_device *pdev)
- {
- return snd_soc_register_platform(&pdev->dev, &samsung_asoc_platform);
- }
- static struct snd_soc_platform_driver samsung_asoc_platform = {
- .ops = &dma_ops,
- .pcm_new = dma_new,
- .pcm_free = dma_free_dma_buffers,
- };
- static int __devinit samsung_asoc_platform_probe(struct platform_device *pdev)
- {
- return snd_soc_register_platform(&pdev->dev, &samsung_asoc_platform);
- }
static struct snd_soc_platform_driver samsung_asoc_platform = { .ops = &dma_ops, .pcm_new = dma_new, .pcm_free = dma_free_dma_buffers, }; static int __devinit samsung_asoc_platform_probe(struct platform_device *pdev) { return snd_soc_register_platform(&pdev->dev, &samsung_asoc_platform); }pcm_new字段指向了dma_new函数,dma_new函数进一步为playback和capture分别调用preallocate_dma_buffer函数,我们看看preallocate_dma_buffer函数的实现:
- static int preallocate_dma_buffer(struct snd_pcm *pcm, int stream)
- {
- struct snd_pcm_substream *substream = pcm->streams[stream].substream;
- struct snd_dma_buffer *buf = &substream->dma_buffer;
- size_t size = dma_hardware.buffer_bytes_max;
- pr_debug("Entered %s\n", __func__);
- buf->dev.type = SNDRV_DMA_TYPE_DEV;
- buf->dev.dev = pcm->card->dev;
- buf->private_data = NULL;
- buf->area = dma_alloc_writecombine(pcm->card->dev, size,
- &buf->addr, GFP_KERNEL);
- if (!buf->area)
- return -ENOMEM;
- buf->bytes = size;
- return 0;
- }
- static int preallocate_dma_buffer(struct snd_pcm *pcm, int stream)
- {
- struct snd_pcm_substream *substream = pcm->streams[stream].substream;
- struct snd_dma_buffer *buf = &substream->dma_buffer;
- size_t size = dma_hardware.buffer_bytes_max;
- pr_debug("Entered %s\n", __func__);
- buf->dev.type = SNDRV_DMA_TYPE_DEV;
- buf->dev.dev = pcm->card->dev;
- buf->private_data = NULL;
- buf->area = dma_alloc_writecombine(pcm->card->dev, size,
- &buf->addr, GFP_KERNEL);
- if (!buf->area)
- return -ENOMEM;
- buf->bytes = size;
- return 0;
- }
static int preallocate_dma_buffer(struct snd_pcm *pcm, int stream) { struct snd_pcm_substream *substream = pcm->streams[stream].substream; struct snd_dma_buffer *buf = &substream->dma_buffer; size_t size = dma_hardware.buffer_bytes_max; pr_debug("Entered %s\n", __func__); buf->dev.type = SNDRV_DMA_TYPE_DEV; buf->dev.dev = pcm->card->dev; buf->private_data = NULL; buf->area = dma_alloc_writecombine(pcm->card->dev, size, &buf->addr, GFP_KERNEL); if (!buf->area) return -ENOMEM; buf->bytes = size; return 0; }该函数先是获得事先定义好的buffer大小,然后通过dma_alloc_weitecombine函数分配dma内存,然后完成substream->dma_buffer的初始化赋值工作。上述的pcm_new回调会在声卡的建立阶段被调用,调用的详细的过程请参考Linux ALSAs声卡驱动之六:ASoC架构中的Machine中的图3.1。
在声卡的hw_params阶段,snd_soc_platform_driver结构的ops->hw_params会被调用,在该回调用,通常会使用api:snd_pcm_set_runtime_buffer()把substream->dma_buffer的数值拷贝到substream->runtime的相关字段中(.dma_area, .dma_addr, .dma_bytes),这样以后就可以通过substream->runtime获得这些地址和大小信息了。
dma buffer获得后,即是获得了dma操作的源地址,那么目的地址在哪里?其实目的地址当然是在dai中,也就是前面介绍的snd_soc_dai结构的playback_dma_data和capture_dma_data字段中,而这两个字段的值也是在hw_params阶段,由snd_soc_dai_driver结构的ops->hw_params回调,利用api:snd_soc_dai_set_dma_data进行设置的。紧随其后,snd_soc_platform_driver结构的ops->hw_params回调利用api:snd_soc_dai_get_dma_data获得这些dai的dma信息,其中就包括了dma的目的地址信息。这些dma信息通常还会被保存在substream->runtime->private_data中,以便在substream的整个生命周期中可以随时获得这些信息,从而完成对dma的配置和操作。
6.2 dma buffer管理
播放时,应用程序把音频数据源源不断地写入dma buffer中,然后相应platform的dma操作则不停地从该buffer中取出数据,经dai送往codec中。录音时则正好相反,codec源源不断地把A/D转换好的音频数据经过dai送入dma buffer中,而应用程序则不断地从该buffer中读走音频数据。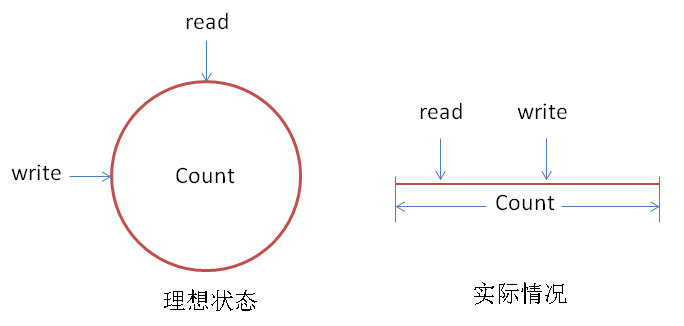
图6.2.1 环形缓冲区
环形缓冲区正好适合用于这种情景的buffer管理,理想情况下,大小为Count的缓冲区具备一个读指针和写指针,我们期望他们都可以闭合地做环形移动,但是实际的情况确实:缓冲区通常都是一段连续的地址,他是有开始和结束两个边界,每次移动之前都必须进行一次判断,当指针移动到末尾时就必须人为地让他回到起始位置。在实际应用中,我们通常都会把这个大小为Count的缓冲区虚拟成一个大小为n*Count的逻辑缓冲区,相当于理想状态下的圆形绕了n圈之后,然后把这段总的距离拉平为一段直线,每一圈对应直线中的一段,因为n比较大,所以大多数情况下不会出现读写指针的换位的情况(如果不对buffer进行扩展,指针到达末端后,回到起始端时,两个指针的前后相对位置会发生互换)。扩展后的逻辑缓冲区在计算剩余空间可条件判断是相对方便。alsa driver也使用了该方法对dma buffer进行管理:
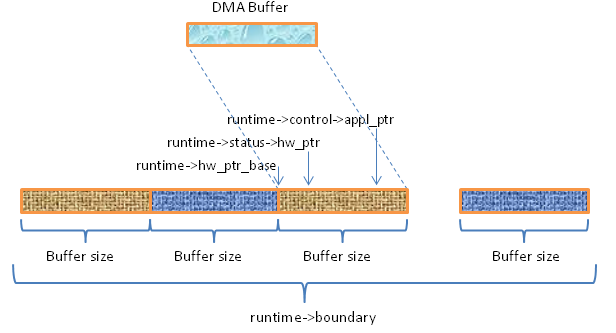
图6.2.2 alsa driver缓冲区管理
snd_pcm_runtime结构中,使用了四个相关的字段来完成这个逻辑缓冲区的管理:通过这几个字段,我们可以很容易地获得缓冲区的有效数据,剩余空间等信息,也可以很容易地把当前逻辑位置映射回真实的dma buffer中。例如,获得播放缓冲区的空闲空间:
- snd_pcm_runtime.hw_ptr_base 环形缓冲区每一圈的基地址,当读写指针越过一圈后,它按buffer size进行移动;
- snd_pcm_runtime.status->hw_ptr 硬件逻辑位置,播放时相当于读指针,录音时相当于写指针;
- snd_pcm_runtime.control->appl_ptr 应用逻辑位置,播放时相当于写指针,录音时相当于读指针;
- snd_pcm_runtime.boundary 扩展后的逻辑缓冲区大小,通常是(2^n)*size;
- static inline snd_pcm_uframes_t snd_pcm_playback_avail(struct snd_pcm_runtime *runtime)
- {
- snd_pcm_sframes_t avail = runtime->status->hw_ptr + runtime->buffer_size - runtime->control->appl_ptr;
- if (avail < 0)
- avail += runtime->boundary;
- else if ((snd_pcm_uframes_t) avail >= runtime->boundary)
- avail -= runtime->boundary;
- return avail;
- }
- static inline snd_pcm_uframes_t snd_pcm_playback_avail(struct snd_pcm_runtime *runtime)
- {
- snd_pcm_sframes_t avail = runtime->status->hw_ptr + runtime->buffer_size - runtime->control->appl_ptr;
- if (avail < 0)
- avail += runtime->boundary;
- else if ((snd_pcm_uframes_t) avail >= runtime->boundary)
- avail -= runtime->boundary;
- return avail;
- }
static inline snd_pcm_uframes_t snd_pcm_playback_avail(struct snd_pcm_runtime *runtime) { snd_pcm_sframes_t avail = runtime->status->hw_ptr + runtime->buffer_size - runtime->control->appl_ptr; if (avail < 0) avail += runtime->boundary; else if ((snd_pcm_uframes_t) avail >= runtime->boundary) avail -= runtime->boundary; return avail; }
要想映射到真正的缓冲区位置,只要减去runtime->hw_ptr_base即可。下面的api用于更新这几个指针的当前位置:
- int snd_pcm_update_hw_ptr(struct snd_pcm_substream *substream)
- int snd_pcm_update_hw_ptr(struct snd_pcm_substream *substream)
int snd_pcm_update_hw_ptr(struct snd_pcm_substream *substream)所以要想通过snd_pcm_playback_avail等函数获得正确的信息前,应该先要调用这个api更新指针位置。以播放(playback)为例,我现在知道至少有3个途径可以完成对dma buffer的写入:以上几种方式最终把数据写入dma buffer中,然后修改runtime->control->appl_ptr的值。
- 应用程序调用alsa-lib的snd_pcm_writei、snd_pcm_writen函数;
- 应用程序使用ioctl:SNDRV_PCM_IOCTL_WRITEI_FRAMES或SNDRV_PCM_IOCTL_WRITEN_FRAMES;
- 应用程序使用alsa-lib的snd_pcm_mmap_begin/snd_pcm_mmap_commit;
播放过程中,通常会配置成每一个period size生成一个dma中断,中断处理函数最重要的任务就是:
- 更新dma的硬件的当前位置,该数值通常保存在runtime->private_data中;
- 调用snd_pcm_period_elapsed函数,该函数会进一步调用snd_pcm_update_hw_ptr0函数更新上述所说的4个缓冲区管理字段,然后唤醒相应的等待进程;
- <SPAN style="FONT-FAMILY: Arial, Verdana, sans-serif"><SPAN style="WHITE-SPACE: normal"></SPAN></SPAN><PRE class=cpp name="code">void snd_pcm_period_elapsed(struct snd_pcm_substream *substream)
- {
- struct snd_pcm_runtime *runtime;
- unsigned long flags;
- if (PCM_RUNTIME_CHECK(substream))
- return;
- runtime = substream->runtime;
- if (runtime->transfer_ack_begin)
- runtime->transfer_ack_begin(substream);
- snd_pcm_stream_lock_irqsave(substream, flags);
- if (!snd_pcm_running(substream) ||
- snd_pcm_update_hw_ptr0(substream, 1) < 0)
- goto _end;
- if (substream->timer_running)
- snd_timer_interrupt(substream->timer, 1);
- _end:
- snd_pcm_stream_unlock_irqrestore(substream, flags);
- if (runtime->transfer_ack_end)
- runtime->transfer_ack_end(substream);
- kill_fasync(&runtime->fasync, SIGIO, POLL_IN);
- }
- </PRE>如果设置了transfer_ack_begin和transfer_ack_end回调,snd_pcm_period_elapsed还会调用这两个回调函数。<BR>
- <BR>
- <PRE></PRE>
- <PRE></PRE>
- <PRE></PRE>
- <SPAN style="FONT-FAMILY: Arial, Verdana, sans-serif"><SPAN style="WHITE-SPACE: normal"></SPAN></SPAN><DIV class="dp-highlighter bg_cpp" sizcache="1" sizset="92"><DIV class=bar sizcache="1" sizset="92"><DIV class=tools sizcache="1" sizset="92"><STRONG>[cpp]</STRONG> <A class=ViewSource title="view plain" href="http://blog.csdn.net/droidphone/article/details/7316061#">view plain</A><A class=CopyToClipboard title=copy href="http://blog.csdn.net/droidphone/article/details/7316061#">copy</A><A class=PrintSource title=print href="http://blog.csdn.net/droidphone/article/details/7316061#">print</A><A class=About title=? href="http://blog.csdn.net/droidphone/article/details/7316061#">?</A></DIV></DIV><OL class=dp-cpp><LI class=alt><SPAN><SPAN class=keyword>void</SPAN><SPAN> snd_pcm_period_elapsed(</SPAN><SPAN class=keyword>struct</SPAN><SPAN> snd_pcm_substream *substream) </SPAN></SPAN></LI><LI><SPAN>{ </SPAN></LI><LI class=alt><SPAN> </SPAN><SPAN class=keyword>struct</SPAN><SPAN> snd_pcm_runtime *runtime; </SPAN></LI><LI><SPAN> unsigned </SPAN><SPAN class=datatypes>long</SPAN><SPAN> flags; </SPAN></LI><LI class=alt><SPAN> </SPAN></LI><LI><SPAN> </SPAN><SPAN class=keyword>if</SPAN><SPAN> (PCM_RUNTIME_CHECK(substream)) </SPAN></LI><LI class=alt><SPAN> </SPAN><SPAN class=keyword>return</SPAN><SPAN>; </SPAN></LI><LI><SPAN> runtime = substream->runtime; </SPAN></LI><LI class=alt><SPAN> </SPAN></LI><LI><SPAN> </SPAN><SPAN class=keyword>if</SPAN><SPAN> (runtime->transfer_ack_begin) </SPAN></LI><LI class=alt><SPAN> runtime->transfer_ack_begin(substream); </SPAN></LI><LI><SPAN> </SPAN></LI><LI class=alt><SPAN> snd_pcm_stream_lock_irqsave(substream, flags); </SPAN></LI><LI><SPAN> </SPAN><SPAN class=keyword>if</SPAN><SPAN> (!snd_pcm_running(substream) || </SPAN></LI><LI class=alt><SPAN> snd_pcm_update_hw_ptr0(substream, 1) < 0) </SPAN></LI><LI><SPAN> </SPAN><SPAN class=keyword>goto</SPAN><SPAN> _end; </SPAN></LI><LI class=alt><SPAN> </SPAN></LI><LI><SPAN> </SPAN><SPAN class=keyword>if</SPAN><SPAN> (substream->timer_running) </SPAN></LI><LI class=alt><SPAN> snd_timer_interrupt(substream->timer, 1); </SPAN></LI><LI><SPAN> _end: </SPAN></LI><LI class=alt><SPAN> snd_pcm_stream_unlock_irqrestore(substream, flags); </SPAN></LI><LI><SPAN> </SPAN><SPAN class=keyword>if</SPAN><SPAN> (runtime->transfer_ack_end) </SPAN></LI><LI class=alt><SPAN> runtime->transfer_ack_end(substream); </SPAN></LI><LI><SPAN> kill_fasync(&runtime->fasync, SIGIO, POLL_IN); </SPAN></LI><LI class=alt><SPAN>} </SPAN></LI></OL></DIV><PRE style="DISPLAY: none" class=cpp name="code">void snd_pcm_period_elapsed(struct snd_pcm_substream *substream)
- {
- struct snd_pcm_runtime *runtime;
- unsigned long flags;
- if (PCM_RUNTIME_CHECK(substream))
- return;
- runtime = substream->runtime;
- if (runtime->transfer_ack_begin)
- runtime->transfer_ack_begin(substream);
- snd_pcm_stream_lock_irqsave(substream, flags);
- if (!snd_pcm_running(substream) ||
- snd_pcm_update_hw_ptr0(substream, 1) < 0)
- goto _end;
- if (substream->timer_running)
- snd_timer_interrupt(substream->timer, 1);
- _end:
- snd_pcm_stream_unlock_irqrestore(substream, flags);
- if (runtime->transfer_ack_end)
- runtime->transfer_ack_end(substream);
- kill_fasync(&runtime->fasync, SIGIO, POLL_IN);
- }
- </PRE>如果设置了transfer_ack_begin和transfer_ack_end回调,snd_pcm_period_elapsed还会调用这两个回调函数。<BR>
- <BR>
- <PRE></PRE>
- <PRE></PRE>
- <PRE></PRE>
- <PRE></PRE>
- void snd_pcm_period_elapsed(struct snd_pcm_substream *substream)
- {
- struct snd_pcm_runtime *runtime;
- unsigned long flags;
- if (PCM_RUNTIME_CHECK(substream))
- return;
- runtime = substream->runtime;
- if (runtime->transfer_ack_begin)
- runtime->transfer_ack_begin(substream);
- snd_pcm_stream_lock_irqsave(substream, flags);
- if (!snd_pcm_running(substream) ||
- snd_pcm_update_hw_ptr0(substream, 1) < 0)
- goto _end;
- if (substream->timer_running)
- snd_timer_interrupt(substream->timer, 1);
- _end:
- snd_pcm_stream_unlock_irqrestore(substream, flags);
- if (runtime->transfer_ack_end)
- runtime->transfer_ack_end(substream);
- kill_fasync(&runtime->fasync, SIGIO, POLL_IN);
- }
- void snd_pcm_period_elapsed(struct snd_pcm_substream *substream)
- {
- struct snd_pcm_runtime *runtime;
- unsigned long flags;
- if (PCM_RUNTIME_CHECK(substream))
- return;
- runtime = substream->runtime;
- if (runtime->transfer_ack_begin)
- runtime->transfer_ack_begin(substream);
- snd_pcm_stream_lock_irqsave(substream, flags);
- if (!snd_pcm_running(substream) ||
- snd_pcm_update_hw_ptr0(substream, 1) < 0)
- goto _end;
- if (substream->timer_running)
- snd_timer_interrupt(substream->timer, 1);
- _end:
- snd_pcm_stream_unlock_irqrestore(substream, flags);
- if (runtime->transfer_ack_end)
- runtime->transfer_ack_end(substream);
- kill_fasync(&runtime->fasync, SIGIO, POLL_IN);
- }
如果设置了transfer_ack_begin和transfer_ack_end回调,snd_pcm_period_elapsed还会调用这两个回调函数。void snd_pcm_period_elapsed(struct snd_pcm_substream *substream) { struct snd_pcm_runtime *runtime; unsigned long flags; if (PCM_RUNTIME_CHECK(substream)) return; runtime = substream->runtime; if (runtime->transfer_ack_begin) runtime->transfer_ack_begin(substream); snd_pcm_stream_lock_irqsave(substream, flags); if (!snd_pcm_running(substream) || snd_pcm_update_hw_ptr0(substream, 1) < 0) goto _end; if (substream->timer_running) snd_timer_interrupt(substream->timer, 1); _end: snd_pcm_stream_unlock_irqrestore(substream, flags); if (runtime->transfer_ack_end) runtime->transfer_ack_end(substream); kill_fasync(&runtime->fasync, SIGIO, POLL_IN); }
7. 图说代码
最后,反正图也画了,好与不好都传上来供参考一下,以下这张图表达了 ASoC中Platform驱动的几个重要数据结构之间的关系:
图7.1 ASoC Platform驱动
一堆的private_data,很重要但也很容易搞混,下面的图不知对大家有没有帮助:
图7.2 private_data
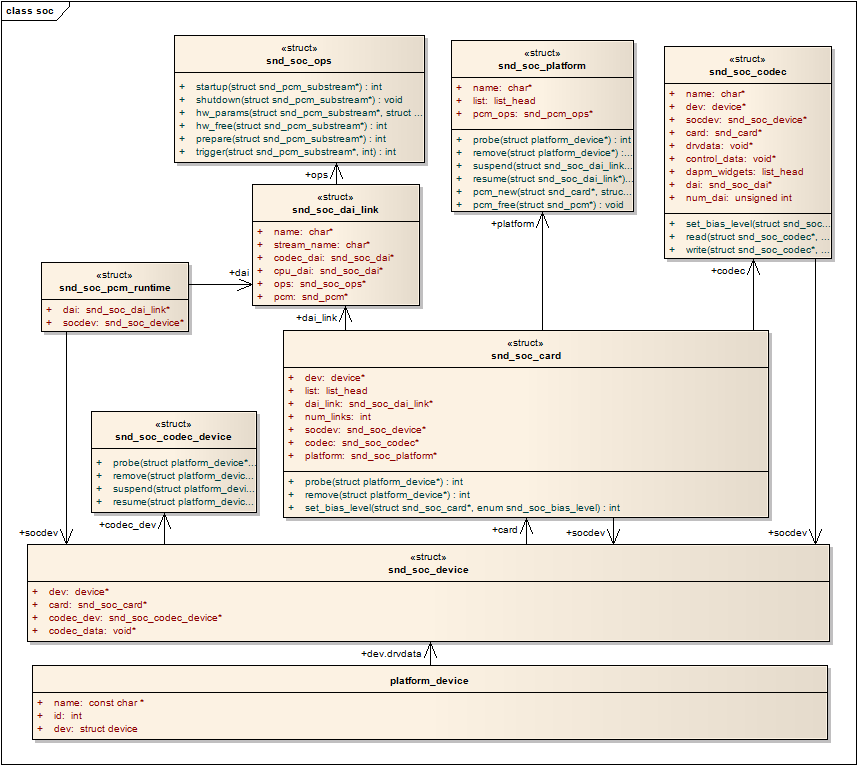
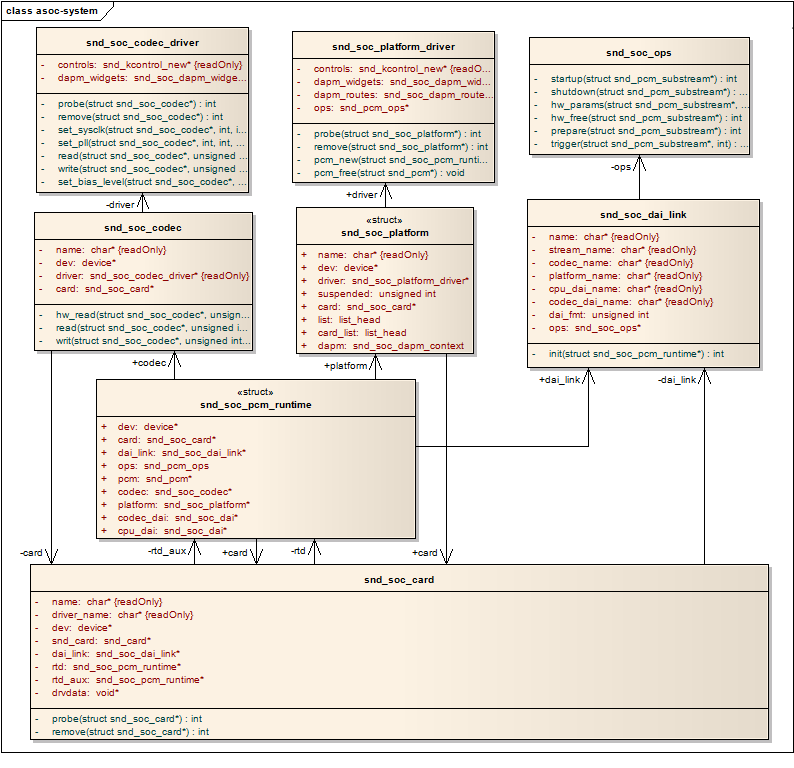

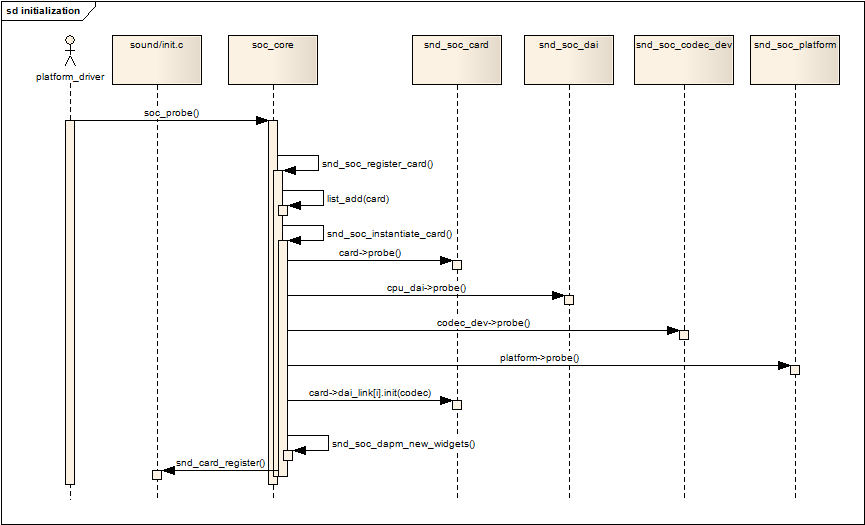
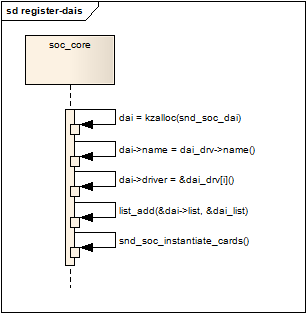
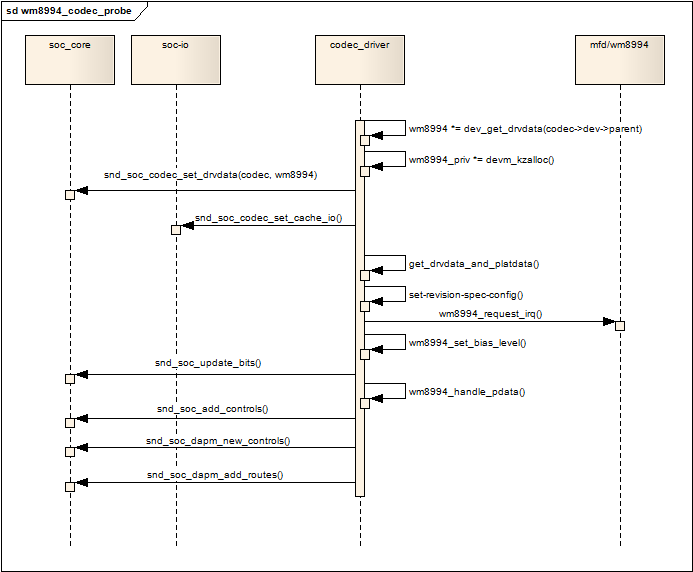

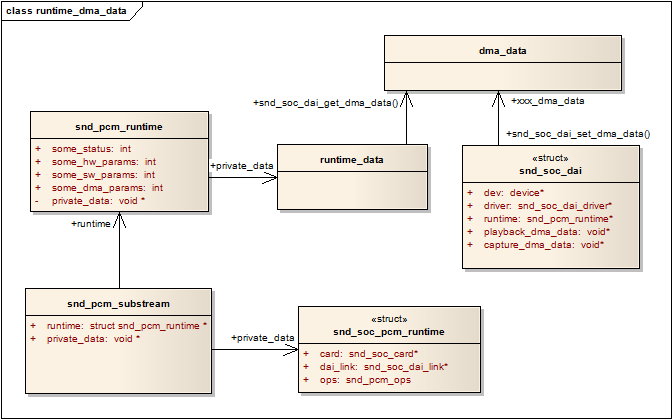















 1307
1307

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









