






探索未来地图构建:互动式SLAM框架
在自动驾驶和机器人领域,准确的三维地图是关键。interactive_slam 是一个创新的开源项目,旨在提供一种半自动的3D激光雷达(LIDAR)映射框架。这个框架不仅允许用户轻松纠正传统SLAM(Simultaneous Localization And Mapping,同步定位与建图)中的错误,而且引入了直观的交互方式,大大降低了人工干预的成本。
项目介绍
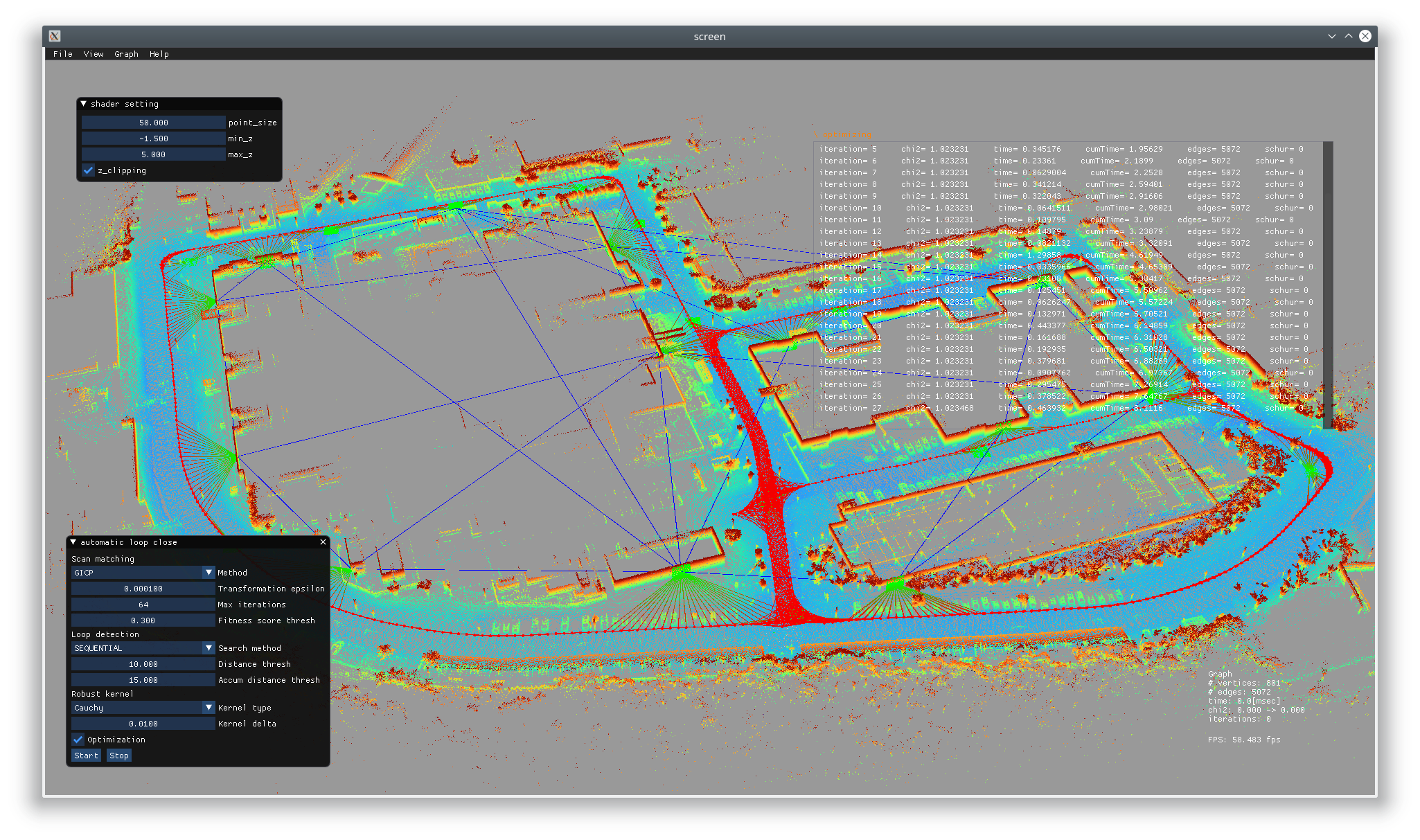
interactive_slam 基于ROS(Robot Operating System)生态,为用户提供了一个完整的工具包,包括手动和自动的闭环检测、基于平面的地图校正、多地图合并以及自动生成的位姿边缘细化功能。通过这一强大工具,用户可以对地图进行精确调整,解决诸如错误的 odometry(里程计)数据、不正确的闭环检测或扭曲的地图等问题。
技术分析
该项目构建在HDL_graph_slam或自定义LeGO-LOAM之上,同时也支持任何ROS包产生的odometry数据。核心特性包括:
- 手动&自动闭环检测:用户可以选择手动或自动方式进行闭环检测以修正累积误差。
- 平面基地图校正:利用场景中的平面信息,对地图进行精确调整。
- 多地图合并:能够方便地将多个地图融合成一个统一的全局模型。
- 自动位姿边缘细化:自动优化节点间的连接,提高整体地图质量。
该框架依赖于一系列先进的库,如GL3W、GLFW、Dear ImGui等,并已测试兼容Ubuntu 18.04及ROS Melodic或更高版本。
应用场景
interactive_slam 的应用范围广泛,适用于自动驾驶汽车、无人机、室内服务机器人等各种需要实时环境建模和导航的场合。无论是在复杂的城市环境中修复定位错误,还是在室内环境下创建精准的室内地图,它都能大显身手。
项目特点
- 易用性:独特的交互模式让用户无需深入理解SLAM算法,也能进行地图修复。
- 灵活性:支持多种输入源,可集成多种传感器数据,兼容性强。
- 扩展性:提供详尽的API文档,方便开发者拓展新的功能或整合到现有系统中。
- 高效性:采用开放源代码的g2o和Ceres库进行优化,确保计算效率。
要开始使用,请参照项目文档完成安装,然后按照提供的示例进行操作,体验高效且直观的3D地图构建过程。
让我们一起探索未来的地图构建,让智能机器人更好地融入我们的世界。有兴趣的话,不妨立即加入interactive_slam 的社区,贡献你的智慧,共同推动这项技术的发展吧!
















 1582
1582

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











