










ROS 提高篇 A Mobile Base-01 — 控制移动平台 — 基本知识
我使用的虚拟机软件:VMware Workstation 11
使用的Ubuntu系统:Ubuntu 14.04.4 LTS
ROS 版本:ROS Indigo
注意:
1 . ROS 提高篇这个专栏的教学有门槛。
2 . 如果你没有学习前面的教程,请想学习前面的 beginner_Tutorials 和 learning_tf 的ROS 相关教程。
这一节没没有编写程序或者在终端中执行什么命令,这一节我们讲一些需要你了解的事,目的是:为了告诉你你现在要怎么学 ROS 。
一 . 怎么理解 “移动平台”:
“移动平台” : A Mobile Base。
就以 Pi 机器人为例 :
完整的 Pi 机器人: ————————————- 移动平台 就是:
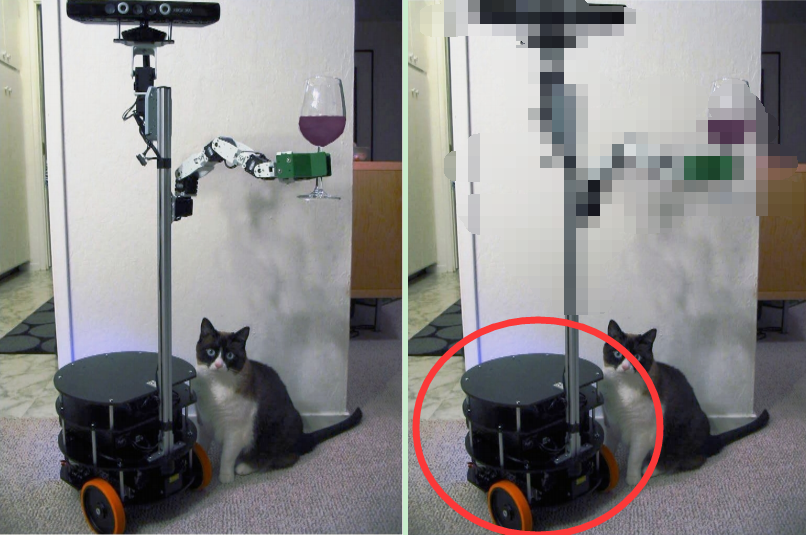
对于陆地式轮式机器人,它们的移动平台就简单的组成零件是:一对轮子和一个万向轮。ROS也可用于控制其他方面的机器人,比如基于飞行的,水下的。但是陆地轮式移动平台是学习开始ROS最好的移动平台。
理解了吗。这一部分的教程(ROS 提高篇之 A Mobile Base),我们就来介绍:如何控制移动平台。(在这部分教程里面,我们使用现成的机器人,所以不介绍如何创建移动平台模型。并且整个 ROS 教程提高篇里面我们都不讲如何创建机器人模型,我们会在ROS 教程实战篇中教你如何创建自己的机器人模型。)
在学习这部分的教程(ROS 提高篇之 A Mobile Base)的开始,知道什么是 移动平台 是十分重要的事情,这样你就知道我们这一章在讲什么。
要想做一个机器人,我们需要先让它能动起来,然后在往上面加传感器,加算法….。
二 . ROS的测量单位和坐标系统:
在我们给我们的机器人发送运动命令前,我们有必要先来了解一下ROS的 测量单位 和 坐标系统 。
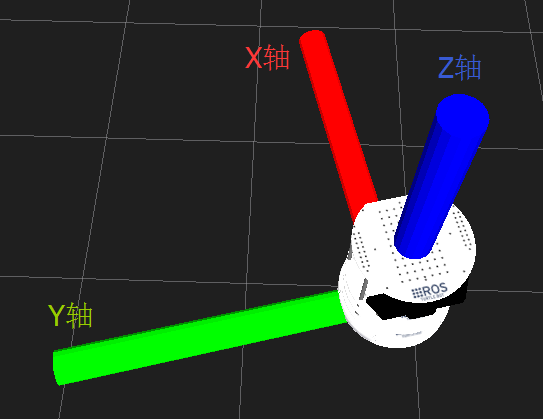
1 . 坐标系统:
当你工作于参考坐标系空间,记住:ROS使用 右手定义 :
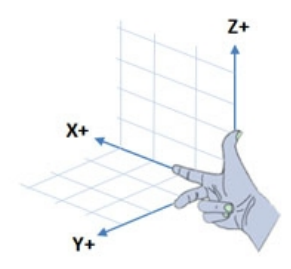
所以,对于 ROS 机器人,如果以它为坐标系的原心,那么:
- x轴:前方
- y轴:左方
- z轴:上方
2 . 在一个绕轴线上的旋转,也使用 右手定义:
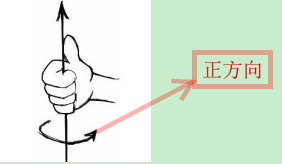
根据右手定义,围绕 z轴正旋转 是 逆时针旋转
3 . 测量单位:
ROS使用公制 :
- 线速度:
m/s - 角速度:
rad/s
线速度=0.5m/s 对于一个室内机器人来说是一个相当快的速度了。角速度=1.0rad/s 就是旋转一圈6秒钟。
例子:下面这条命令不用运行,只是为了讲解后面数字参数的意义。
$ rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]' 这句话就是给 /turtle1/cmd_vel 话题发布一次:让机器人 向x轴正方向前进:线速度:2.0m/s; 绕z轴正方向旋转:角速度:1.8ral/s。
搞定
下一讲,我们来介绍: ROS的控制运动的层次。ROS控制运动并不单纯,它分好多层。类似于中国西周时代的统治层次(天子-> 诸侯 -> 卿大夫 ->士 -> 平民 -> 奴隶)。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









