







 本文通过实际例子,结合硬件和软件两方面介绍了I2C驱动的实现方法。首先讲解了At24C08和Bq27200的电气连接及Linux I2C驱动框架,接着详细分析了I2C总线驱动代码,特别是master_xfer函数的实现。
本文通过实际例子,结合硬件和软件两方面介绍了I2C驱动的实现方法。首先讲解了At24C08和Bq27200的电气连接及Linux I2C驱动框架,接着详细分析了I2C总线驱动代码,特别是master_xfer函数的实现。
本文用到的一些资源:
1. Source Insight软件
2. mini2440原理图。 下载地址http://wenku.baidu.com/view/0521ab8da0116c175f0e48fe.html
3. S3C2440 datasheet
4. AT24C08 datasheet
5. Bq27200 datasheet
6. kernel 2.6.31中的At24.c ,Bq27x00_battery.c和i2c-s3c2410.c
7. mini2440的板文件mach-mini2440.c
8. 参考资料:《linux设备驱动开发详解(第2版)》 by 宋宝华
本文的结构:
第一部分:At24C08驱动
1. mini2440中at24c08的电气连接
2. Linux中I2C驱动框架分析
3. I2C总线驱动代码分析
4. at24c08驱动代码分析
第二部分:Bq27200驱动
1. Bq27200的典型应用电路
2. 主要分析一下ba27x00的代码,对比at24c08来加深理解。
---------------------我是分割线----------------------
第一部分
1. mini2440中at24c08的电气连接及其板文件
如下图。


24C08的I2C接口是与2440的IICSCL/IICSDA直接相连的。在2440内部集成了一个I2C控制器,可以通过寄存器来控制它。先来和这四个寄存器混个脸熟吧,后面分析时还会经常用到这四个寄存器。

在mini2440的板文件中可以找到关于at24c08的内容,如下:
可以看出,在mini2440的init函数中注册了一个i2c的设备,这个设备我们使用了一个结构体i2c_board_info来描述。这个结构体定义在i2c.h文件中。如下:
其中的platform_data又指向一个at24_platform_data结构体。
以上只是at24c08的部分,在板文件中还可以看到关于2440内部i2c控制器的部分,如下:
其中s2c_device_i2c0定义在arch/arm/plat-s3c/Dev-i2c0.c中(在同一目录下还可以看到很多Dev-开头的c文件,都是2440内部集成的各种设备),仔细看下面的代码再对比2440的datasheet就可以很清楚的知道:
* 控制器的IO起始地址为S3C_PA_IIC =0x54000000,大小是4K,中断号是43 = IRQ_IIC S3C2410_IRQ(27)
* 控制器名是"s3c2410-i2c"
2. Linux中I2C驱动框架分析
这部分是本文的重点部分。根据上面的电气连接关系我们可以看出,我们要想操作24c08,必须要做两方面的驱动。
第一方面: 2440中I2C控制器的驱动,有了这部分驱动,我们才可以操作控制器来产生I2C的时序信号,来发送数据和接收数据。
第二方面: 24C08的驱动,有了这部分驱动,才能使用控制器正确操作芯片,来读取和存放数据。
在Linux系统中,对上边第一方面的实现叫做I2C总线驱动,对第二方面的实现叫做I2C设备驱动。一般来说,如果CPU中集成了I2C控制器并且Linux内核支持这个CPU,那么总线驱动方面就不用我们操心了,内核已经做好了。但如果CPU中没有I2C控制器,而是外接的话,那么就要我们自己实现总线驱动了。对于设备驱动来说,一般常用的驱动也都包含在内核中了,如果我们用了一个内核中没有的芯片,那么就要自己来写了。
Linux中I2C体系结构如下图所示(图片来源于网络)。图中用分割线分成了三个层次:用户空间(也就是应用程序),内核(也就是驱动部分)和硬件(也就是实际物理设备,这里就是2440中的i2c控制器和at24c08)。这个够清晰了吧?我们现在就是要研究中间那一层。

由上图我们还可以看出哪些信息呢?
1). 可以看到几个重要的组成部分,它们是:Driver,Client,i2c-dev,i2c-core,Algorithm,Adapter。这几个部分在内核中都有相应的数据结构,定义在i2c.h文件中,尽量避免粘贴打断代码来凑数,就不贴出来了。简要概括一下每个结构体的意义。
Driver --> struct i2c_driver
这个结构体对应了驱动方法,重要成员函数有probe,remove,suspend,resume。
还包括一个重要的数据结构: struct i2c_device_id *id_table; 如果驱动可以支持好几个设备,那么这里面就要包含这些设备的ID
Client --> struct i2c_client
应用程序是选择性失明的,它只能看到抽象的设备文件,其他部分都是看不见的。图中只有Client与应用程序有联系,所以我们可以大胆得出结论:这个Client是对应于真实的物理设备,在本文就是at24c08。 所以很显然这个结构体中的内容应该是描述设备的。包含了芯片地址,设备名称,设备使用的中断号,设备所依附的控制器,设备所依附的驱动等内容。
Algorithm -->struct i2c_algorithm
Algorithm就是算法的意思。在这个结构体中定义了一套控制器使用的通信方法。其中关键函数是master_xfer()。我们实际工作中的重要一点就是要实现这个函数。
Adapter --> struct i2c_adapter
这个结构体对应一个控制器。其中包含了控制器名称,algorithm数据,控制器设备等。
2). 可以看出,i2c-core起到了关键的承上启下的作用。事实上也是这样,我们将从这里展开来分析。源代码位于drivers/i2c/i2c-core.c中。在这个文件中可以看到几个重要的函数。
*增加/删除i2c控制器的函数
*增加/删除设备驱动的函数
*增加/删除i2c设备的函数
注:在2.6.30版本之前使用的是i2c_attach_client()和i2c_detach_client()函数。之后attach被merge到了i2c_new_device中,而detach直接被unresister取代。实际上这两个函数内部都是调用了device_register()和device_unregister()。源码如下:
*I2C传输、发送和接收函数
其中send和receive分别都调用了transfer函数,而transfer也不是直接和硬件交互,而是调用algorithm中的master_xfer()函数,所以我们要想进行数据传输,必须自己来实现这个master_xfer()函数,这是总线驱动开发的重点之一。下面以read()系统调用的流程来简单梳理一下:

大热的天,刚刚负重从五道口走到石板房,大约4公里吧。终于让我找了一个咖啡屋休息一下,继续写这篇驱动分析。单身的生活就是这样无聊啊。 不发牢骚了,活出个样儿来给自己看!千难万险脚下踩,啥也难不倒咱!继续整!~
先说一下,本文中有个疑惑,一直没有搞懂,写在这里,望高人指点一二,不胜感激!
#define I2C_M_NOSTART 0x4000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_REV_DIR_ADDR 0x2000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_IGNORE_NAK 0x1000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_NO_RD_ACK 0x0800 /* if I2C_FUNC_PROTOCOL_MANGLING */
这里I2C_FUNC_PROTOCOL_MANGLING 是什么意思?为什么定义这些东东?看了注释也不太理解。求解释!
3. I2C总线驱动代码分析
s3c2440的总线驱动代码在i2c-s3c2410.c中。照例先从init看起。
在init中只是调用了平台驱动注册函数注册了一个i2c的平台驱动s3c24xx_i2c_driver。这个驱动是一个platform_driver的结构体变量。注意这里不是i2c_driver结构体,因为i2c_driver是对设备的驱动,而这里对控制器的驱动要使用platform_driver
同样的,重要的函数还是那几个:probe,remove,suspend_late,resume。再加上一个id_table和device_driver结构体变量。
下面逐个分析:
* probe函数
当调用platform_driver_register函数注册platform_driver结构体时,probe指针指向的s3c24xx_i2c_probe函数将会被调用。这部分详细解释参考本博客另一篇文章《S3C2410看门狗驱动分析》。细心的朋友可能会发现,在s3c24xx_i2c_driver中,驱动的名字是"s3c-i2c",而在板文件中可以看到,设备的名字是"s3c2410-i2c",这两个名字不一样,那驱动和设备是如何match的呢?答案就在于id_table。这个id_table包含了驱动所支持的设备ID表。在match的时候,判断这个表中的名字是不是和设备一致,一致则match成功。这也是为什么一个驱动可以同时match成功多个设备的原因。如果只是靠platform_driver-->driver中的名字来匹配的话,那么驱动和设备只能是一对一的关系了。
扯远了,还是看看probe的代码吧~
*remove函数
这是和probe相反的一个函数,在i2c_adap_s3c_exit时调用。主要功能是注销适配器,释放中断,释放内存区域,禁止始终等等。看到上边代码中的err_的各个部分了吧? remove是它们的汇总。
*suspend函数和resume函数
把这两个放一起说吧,挂起和恢复函数。挂起时保存状态并置标志位,恢复时重新初始化i2c适配器并置标志位。
Algorithm
哎呀我去,终于到这了。憋得我难受啊。这里要重点介绍一下,不仅要知其然,还要知其所以然,这样我们以后自己写驱动的时候就有把握了。
这里实现的就是这个s3c24xx_i2c_xfer。这个是控制器能不能动作的关键,缺了这个,控制器就是废铜烂铁。
完成任务的函数是s3c24xx_i2c_doxfer(),源码清单如下,
上面代码可以分成几个部分来看:
* s3c24xx_i2c_set_master() 这个函数每隔1ms查看一次i2c总线状态,timeout是400ms,如果在这期间总线状态不忙,则返回零。否则返回-ETIMEDOUT
* 将要发送的消息和其他信息付给i2c->msg和其他变量,并将状态设置为STATE_START
* s3c24xx_i2c_enable_irq() 使能中断
* s3c24xx_i2c_message_start() 重中之重啊。在看代码之前先来看看2440的datasheet上是怎么说的吧。
s3c24xx_i2c_message_start() 重中之重啊。在看代码之前先来看看2440的datasheet上是怎么说的吧。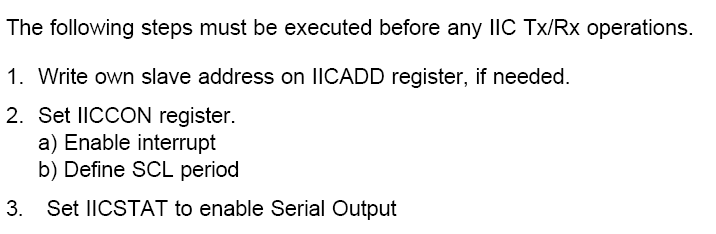
代码清单如下:
(今天没写完啊,明天继续~)

















 9890
9890

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









