









1 创建ROS工作空间
一开始不太明白为什么要创建工作空间,后来在知乎上看到这篇文章https://zhuanlan.zhihu.com/p/91673574。创建ROS的工作空间,就相当于创建一个ROS的工程。
ROS一般称作为操作系统,但是我感觉它更适合描述为一个在Ubuntu下对机器人进行控制的大型软件。创建一个工作目录,就好像是c++中创建一个工程,这样就避免直接在home目录下编译,造成文件目录比较混乱了。
1.1 构建自己的工作目录
之所以要创建一个自己的工作目录,是为了避免直接在自己的home目录,也就是目录下创建项目。简洁目录,是一种比较好的习惯。指令如下:
cd ~
mkdir workspace
cd workspace
后续所有的项目都存放 ~/workspace目录下。
1.2 创建一个ros工作空间
1. 创建一个工作空间顶层目录结构:
这里所谓的顶层空间目录结构,就是catkin_ws1/src。
注意: catkin_ws1可以换为其他的名字,但是src一定要使用这个名字
mkdir -p catkin_ws1/src
2. 创建一个工作空间catkin_ws1:
cd catkin_ws1
catkin_make
这里,我们就创建好了一个ROS工作空间catkin_ws1。
注意: 要编译工作空间,需要在catkin_ws文件夹下进行,而不能在catkin_ws/src文件夹下进行
3. 分析工作空间目录结构:
下面我们通过tree命令,查看catkin_ws1目录结构,首先安装tree:
sudo apt install tree
安装之后,执行:
tree -L 2
参数-L表示指定显示目录级数,目前我们只需要了解两级,所以参数设为2。
可以看到一级目录下有三个目录
src是我们自己创建的,用于后续创建源文件。程序包都存储在src文件夹中,如果要创建或编译一个程序包,必须将这些程序包复制到src文件夹中。build是自动生成的,用于存放编译过程中产生的中间临时文件。devel目录保存一些比较重要的配置文件和最终生成的可执行程序。
4. 两个比较重要的工作空间配置文件:
在一个ros工作空间有两个比较重要的配置文件,都是在创建工作空间时,即执行catkin_make命令时自动生成的。
一个是src目录下的CMakeLists.txt,此文件是一个软链接文件,指向ros系统目录下的一个cmake文件,此文件的作用在编译ros程序时,自动编译src目录下的所有ros包,此文件也是一个ros工作空间的标志文件。
第二个重要配置文件是devel下的setup.bash,此文件激活当前ros工作空间。一个系统中,可以创建多个ros工作空间,但是同时只有一个处于有效状态,激活的方法是在目标ros工作空间下,执行以下指令:
source devel/setup.bash
可以通过打印ROS_PACKAGE_PATH变量,来确定当前哪一个ros工作空间有效,指令如下:
echo $ROS_PACKAGE_PATH
可以看到在执行前后,输出结果多了“~/workspace/catkin_ws1/src:”,其中:为分隔符,前面即是有效的ros工作空间,共有的那一项是ros系统目录。
1.3 切换ros工作空间
在一个系统中,经常会存在多个工作空间,下面演示如何切换工作空间。
1. 无ros有效工作空间:
首先新创建一个终端页,命令在“ROS 系统安装与体检”介绍了,就不再写了,如果忘记,再查下。然后检查当前有效的ros工作空间,如图:

发现目前还没有激活ros工作空间。使用source devel/setup.bash指令,只是在当前终端页中激活了ros工作空间,不会在新创建的终端页中生效。
2. 创建ros工作空间catkin_ws2:
cd ~/workspace
mkdir -p catkin_ws2/src
cd catkin_ws2
catkin_make
3. 切换ros工作空间:
首先检查当前有效的ros工作空间,执行:
echo $ROS_PACKAGE_PATH
运行结果如图:

此时虽然在catkin_ws2工作空间中,但是并没有激活,所以目前没有有效的ros工作空间。激活catkin_ws2工作空间,执行:
source devel/setup.bash
echo $ROS_PACKAGE_PATH
执行结果如图:
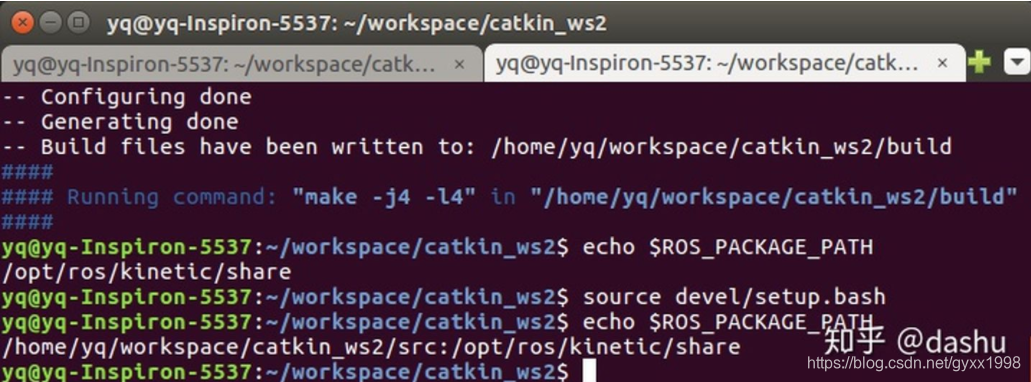 此时
此时catkin_ws2为有效ros工作空间,切换catkin_ws1,在当前终端页中执行:
source ../catkin_ws1/devel/setup.bash
echo $ROS_PACKAGE_PATH
此时,虽然当前处在catkin_ws2中,但是有效ros工作空间是catkin_ws1
2 小结
-
ros工作空间是很多ros指令正常工作的前提,所以要确保自己使用的工作空间为有效工作空间,在创建工作空间之后,第一步要做的就是使能工作空间,否则后续操作可能会出问题。
-
同一系统中,可存在多个工作空间,通过
source指令可以轻松切换工作空间。 -
通常,在一段时间,在做同一个项目,使用的都是同一个工作空间,这样,可以将source指令添加到终端配置脚本中,这样就不用在每个新的终端页都要执行source指令,指令如下:
echo "source ~/workspace/catkin_ws2/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
3 重要命令总结
# 查看当前工作空间
echo $ROS_PACKAGE_PATH
# 切换工作空间
source ~/ur_ws/devel/setup.bash
# 切换工作空间并配置到终端
echo "source ~/ur_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
# 在编辑器里修改工作空间
gedit .bashrc














 1064
1064











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









