






点击蓝字
关注我们
关注并星标
从此不迷路
计算机视觉研究院

公众号ID|计算机视觉研究院
学习群|扫码在主页获取加入方式
计算机视觉研究院专栏
Column of Computer Vision Institute
本文汇总了实例分割相关的数据集资源,均附有下载链接,更多数据集资源汇总:https://www.cvmart.net/dataSets。
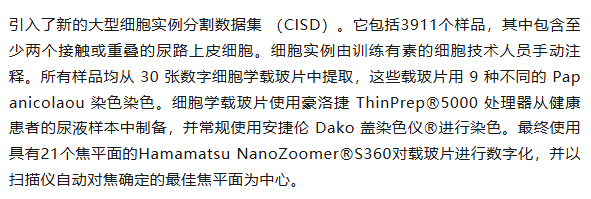
细胞实例分割数据集
数据集下载链接:http://suo.nz/3bokV6

非模态实例分割数据集
数据集下载链接:http://suo.nz/33S7Qp


Embrapa酿酒葡萄实例分割数据集
数据集下载链接:http://suo.nz/337vkW


树上芒果实例分割数据集
数据集下载链接:http://suo.nz/2VBigf

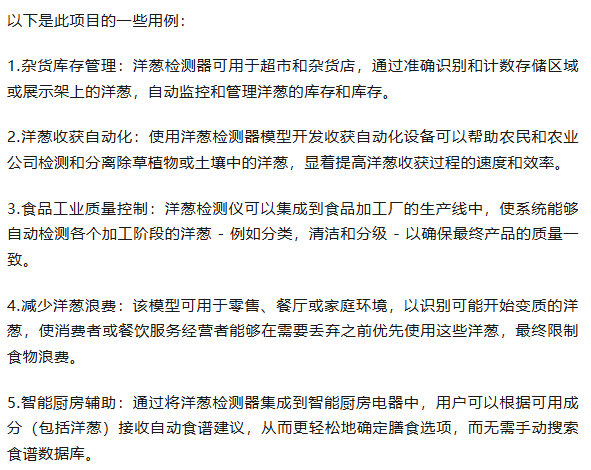
实例分割计算机视觉项目
数据集下载链接:http://suo.nz/2O5vcs

END


转载请联系本公众号获得授权

计算机视觉研究院学习群等你加入!
ABOUT
计算机视觉研究院
计算机视觉研究院主要涉及深度学习领域,主要致力于目标检测、目标跟踪、图像分割、OCR、模型量化、模型部署等研究方向。研究院每日分享最新的论文算法新框架,提供论文一键下载,并分享实战项目。研究院主要着重”技术研究“和“实践落地”。研究院会针对不同领域分享实践过程,让大家真正体会摆脱理论的真实场景,培养爱动手编程爱动脑思考的习惯!

往期推荐
🔗
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









