






在前面一文中,我们分析了Dalvik虚拟机创建Java堆的过程。有了Java堆之后,Dalvik虚拟机就可以在上面为对象分配内存了。在Java堆为对象分配内存需要解决内存碎片和内存不足两个问题。要解决内存碎片问题,就要找到一块大小最合适的空闲内存分配给对象使用。而内存不足有可能是内存配额用完引起的,也有可能是垃圾没有及时回收引起的,要区别对待。本文就详细分析Dalvik虚拟机是如何解决这些问题的。
内存碎片问题其实是一个通用的问题,不单止Dalvik虚拟机在Java堆为对象分配内存时会遇到,C库的malloc函数在分配内存时也会遇到。Android系统使用的C库bionic使用了Doug Lea写的dlmalloc内存分配器。也就是说,我们调用函数malloc的时候,使用的是dlmalloc内存分配器来分配内存。这是一个成熟的内存分配器,可以很好地解决内存碎片问题。关于dlmalloc内存分配器的设计,可以参考这篇文章:A Memory Allocator。
前面Dalvik虚拟机垃圾收集机制简要介绍和学习计划一文提到,Dalvik虚拟机的Java堆的底层实现是一块匿名共享内存,并且将其抽象为C库的一个mspace,如图1所示:
图1 Dalvik虚拟机Java堆
于是,Dalvik虚拟机就很机智地利用C库里面的dlmalloc内存分配器来解决内存碎片问题!
为了应对可能面临的内存不足问题,Dalvik虚拟机采用一种渐进的方法来为对象分配内存,直到尽了最大努力,如图2所示:
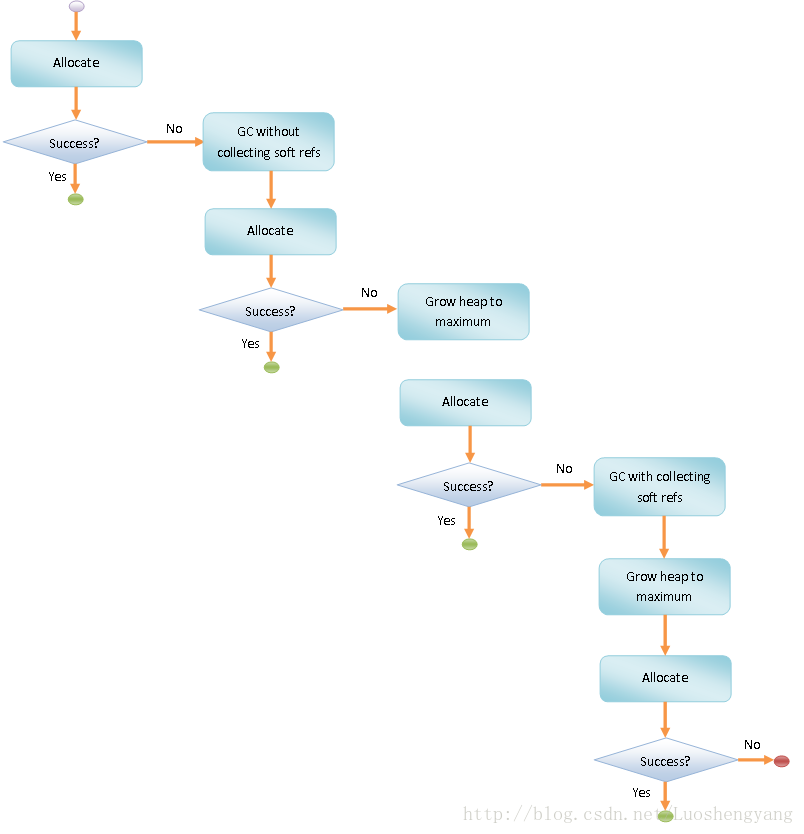
图2 Dalvik虚拟机为对象分配内存的过程
接下来,我们就详细分析这个过程,以便可以了解Dalvik虚拟机是如何解决内存不足问题的,以及分配出来的内存是如何管理的。
Dalvik虚拟机实现了一个dvmAllocObject函数。每当Dalvik虚拟机需要为对象分配内存时,就会调用函数dvmAllocObject。例如,当Dalvik虚拟机的解释器遇到一个new指令时,它就会调用函数dvmAllocObject,如下所示:
- HANDLE_OPCODE(OP_NEW_INSTANCE /*vAA, class@BBBB*/)
- {
- ClassObject* clazz;
- Object* newObj;
- EXPORT_PC();
- vdst = INST_AA(inst);
- ref = FETCH(1);
- ......
- clazz = dvmDexGetResolvedClass(methodClassDex, ref);
- if (clazz == NULL) {
- clazz = dvmResolveClass(curMethod->clazz, ref, false);
- ......
- }
- ......
- newObj = dvmAllocObject(clazz, ALLOC_DONT_TRACK);
- ......
- SET_REGISTER(vdst, (u4) newObj);
- }
- FINISH(2);
- OP_END
关于Dalvik虚拟机的解释器的实现,可以参考Dalvik虚拟机的运行过程分析一文,上面这段代码首先是找到要创建的对象的类型clazz,接着以其作为参数调用函数dvmAllocObject为要创建的对象分配内存。另外一个参数ALLOC_DONT_TRACK是告诉Dalvik虚拟机的堆管理器,要分配的对象是一个根集对象,不需要对它进行跟踪。因为根集对象在GC时是会自动被追踪处理的。
函数dvmAllocObject的实现如下所示:
- Object* dvmAllocObject(ClassObject* clazz, int flags)
- {
- Object* newObj;
- assert(clazz != NULL);
- assert(dvmIsClassInitialized(clazz) || dvmIsClassInitializing(clazz));
- /* allocate on GC heap; memory is zeroed out */
- newObj = (Object*)dvmMalloc(clazz->objectSize, flags);
- if (newObj != NULL) {
- DVM_OBJECT_INIT(newObj, clazz);
- dvmTrackAllocation(clazz, clazz->objectSize); /* notify DDMS */
- }
- return newObj;
- }
函数dvmAllocObject调用函数dvmMalloc从Java堆中分配一块指定大小的内存给新创建的对象使用。如果分配成功,那么接下来就先使用宏DVM_OBJECT_INIT来初始化新创建对对象的成员变量clazz,使得新创建的对象可以与某个特定的类关联起来,接着再调用函数dvmTrackAllocation记录当前的内存分配信息,以便通知DDMS。
函数dvmMalloc返回的只是一块内存地址,这是没有类型的。但是由于每一个Java对象都是从Object类继承下来的,因此,函数dvmAllocObject可以将获得的没有类型的内存块强制转换为一个Object对象。
Object类的定义如下所示:
- struct Object {
- /* ptr to class object */
- ClassObject* clazz;
- /*
- * A word containing either a "thin" lock or a "fat" monitor. See
- * the comments in Sync.c for a description of its layout.
- */
- u4 lock;
- };
Object类有两个成员变量:clazz和lock。其中,成员变量clazz的类型为ClassObject,它对应于Java层的java.lang.Class类,用来描述对象所属的类。成员变量lock是一个锁,正是因为有了这个成员变量,在Java层中,每一个对象都可以当锁使用。
理解了Object类的定义之后,我们继续分析函数dvmMalloc的实现,如下所示:
- void* dvmMalloc(size_t size, int flags)
- {
- void *ptr;
- dvmLockHeap();
- /* Try as hard as possible to allocate some memory.
- */
- ptr = tryMalloc(size);
- if (ptr != NULL) {
- /* We've got the memory.
- */
- if (gDvm.allocProf.enabled) {
- Thread* self = dvmThreadSelf();
- gDvm.allocProf.allocCount++;
- gDvm.allocProf.allocSize += size;
- if (self != NULL) {
- self->allocProf.allocCount++;
- self->allocProf.allocSize += size;
- }
- }
- } else {
- /* The allocation failed.
- */
- if (gDvm.allocProf.enabled) {
- Thread* self = dvmThreadSelf();
- gDvm.allocProf.failedAllocCount++;
- gDvm.allocProf.failedAllocSize += size;
- if (self != NULL) {
- self->allocProf.failedAllocCount++;
- self->allocProf.failedAllocSize += size;
- }
- }
- }
- dvmUnlockHeap();
- if (ptr != NULL) {
- /*
- * If caller hasn't asked us not to track it, add it to the
- * internal tracking list.
- */
- if ((flags & ALLOC_DONT_TRACK) == 0) {
- dvmAddTrackedAlloc((Object*)ptr, NULL);
- }
- } else {
- /*
- * The allocation failed; throw an OutOfMemoryError.
- */
- throwOOME();
- }
- return ptr;
- }
在Java堆分配内存前后,要对Java堆进行加锁和解锁,避免多个线程同时对Java堆进行操作。这分别是通过函数dvmLockHeap和dvmunlockHeap来实现的。真正执行内存分配的操作是通过调用另外一个函数tryMalloc来完成的。如果分配成功,则记录当前线程成功分配的内存字节数和对象数等信息。否则的话,就记录当前线程失败分配的内存字节数和对象等信息。有了这些信息之后,我们就可以通过DDMS等工具来对应用程序的内存使用信息进行统计了。
最后,如果分配内存成功,并且参数flags的ALLOC_DONT_TRACK位设置为0,那么需要将新创建的对象增加到Dalvik虚拟机内部的一个引用表去。保存在这个内部引用表的对象在执行GC时,会添加到根集去,以便可以正确地判断对象的存活。
另一方面,如果分配内存失败,那么就是时候调用函数throwOOME抛出一个OOM异常了。
我们接下来继续分析函数tryMalloc的实现,如下所示:
- static void *tryMalloc(size_t size)
- {
- void *ptr;
- ......
- ptr = dvmHeapSourceAlloc(size);
- if (ptr != NULL) {
- return ptr;
- }
- if (gDvm.gcHeap->gcRunning) {
- ......
- dvmWaitForConcurrentGcToComplete();
- } else {
- ......
- gcForMalloc(false);
- }
- ptr = dvmHeapSourceAlloc(size);
- if (ptr != NULL) {
- return ptr;
- }
- ptr = dvmHeapSourceAllocAndGrow(size);
- if (ptr != NULL) {
- ......
- return ptr;
- }
- gcForMalloc(true);
- ptr = dvmHeapSourceAllocAndGrow(size);
- if (ptr != NULL) {
- return ptr;
- }
- ......
- return NULL;
- }
函数tryMalloc的执行流程就如图2所示:
1. 调用函数dvmHeapSourceAlloc在Java堆上分配指定大小的内存。如果分配成功,那么就将分配得到的地址直接返回给调用者了。函数dvmHeapSourceAlloc在不改变Java堆当前大小的前提下进行内存分配,这是属于轻量级的内存分配动作。
2. 如果上一步内存分配失败,这时候就需要执行一次GC了。不过如果GC线程已经在运行中,即gDvm.gcHeap->gcRunning的值等于true,那么就直接调用函数dvmWaitForConcurrentGcToComplete等到GC执行完成就是了。否则的话,就需要调用函数gcForMalloc来执行一次GC了,参数false表示不要回收软引用对象引用的对象。
3. GC执行完毕后,再次调用函数dvmHeapSourceAlloc尝试轻量级的内存分配操作。如果分配成功,那么就将分配得到的地址直接返回给调用者了。
4. 如果上一步内存分配失败,这时候就得考虑先将Java堆的当前大小设置为Dalvik虚拟机启动时指定的Java堆最大值,再进行内存分配了。这是通过调用函数dvmHeapSourceAllocAndGrow来实现的。
5. 如果调用函数dvmHeapSourceAllocAndGrow分配内存成功,则直接将分配得到的地址直接返回给调用者了。
6. 如果上一步内存分配还是失败,这时候就得出狠招了。再次调用函数gcForMalloc来执行GC。参数true表示要回收软引用对象引用的对象。
7. GC执行完毕,再次调用函数dvmHeapSourceAllocAndGrow进行内存分配。这是最后一次努力了,成功与事都到此为止。
这里涉及到的关键函数有三个,分别是dvmHeapSourceAlloc、dvmHeapSourceAllocAndGrow和gcForMalloc。后面一个我们在接下来一篇文章分析Dalvik虚拟机的垃圾收集过程时再分析。现在重点分析前面两个函数。
函数dvmHeapSourceAlloc的实现如下所示:
- void* dvmHeapSourceAlloc(size_t n)
- {
- HS_BOILERPLATE();
- HeapSource *hs = gHs;
- Heap* heap = hs2heap(hs);
- if (heap->bytesAllocated + n > hs->softLimit) {
- ......
- return NULL;
- }
- void* ptr;
- if (gDvm.lowMemoryMode) {
- ......
- ptr = mspace_malloc(heap->msp, n);
- if (ptr == NULL) {
- return NULL;
- }
- uintptr_t zero_begin = (uintptr_t)ptr;
- uintptr_t zero_end = (uintptr_t)ptr + n;
- ......
- uintptr_t begin = ALIGN_UP_TO_PAGE_SIZE(zero_begin);
- uintptr_t end = zero_end & ~(uintptr_t)(SYSTEM_PAGE_SIZE - 1);
- ......
- if (begin < end) {
- ......
- madvise((void*)begin, end - begin, MADV_DONTNEED);
- ......
- memset((void*)end, 0, zero_end - end);
- ......
- zero_end = begin;
- }
- memset((void*)zero_begin, 0, zero_end - zero_begin);
- } else {
- ptr = mspace_calloc(heap->msp, 1, n);
- if (ptr == NULL) {
- return NULL;
- }
- }
- countAllocation(heap, ptr);
- ......
- if (gDvm.gcHeap->gcRunning || !hs->hasGcThread) {
- ......
- return ptr;
- }
- if (heap->bytesAllocated > heap->concurrentStartBytes) {
- ......
- dvmSignalCond(&gHs->gcThreadCond);
- }
- return ptr;
- }
这个函数定义在文件dalvik/vm/alloc/HeapSource.cpp中。
从前面Dalvik虚拟机Java堆创建过程分析一文可知,gHs是一个全局变量,它指向一个HeapSource结构。在这个HeapSource结构中,有一个heaps数组,其中第一个元素描述的是Active堆,第二个元素描述的是Zygote堆。
通过宏hs2heap可以获得HeapSource结构中的Active堆,保存在本地变量heap中。宏hs2heap的实现如下所示:
- #define hs2heap(hs_) (&((hs_)->heaps[0]))
在前面Dalvik虚拟机Java堆创建过程分析一文中,我们解释了Java堆有起始大小、最大值、增长上限值、最小空闲值、最大空闲值和目标利用率等参数。在Dalvik虚拟机内部,还有一个称为软限制(Soft Limit)的参数。堆软限制是一个与堆目标利率相关的参数。
Java堆的Soft Limit开始的时候设置为最大允许的整数值。但是每一次GC之后,Dalvik虚拟机会根据Active堆已经分配的内存字节数、设定的堆目标利用率和Zygote堆的大小,重新计算Soft Limit,以及别外一个称为理想大小(Ideal Size)的值。如果此时只有一个堆,即只有Active堆没有Zygote堆,那么Soft Limit就等于Ideal Size。如果此时有两个堆,那么Ideal Size就等于Zygote堆的大小再加上Soft Limit值,其中Soft Limit值就是此时Active堆的大小,它是根据Active堆已经分配的内存字节数和设定的堆目标利用率计算得到的。
这个Soft Limit值到底有什么用呢?它主要是用来限制Active堆无节制地增长到最大值的,而是要根据预先设定的堆目标利用率来控制Active有节奏地增长到最大值。这样可以更有效地使用堆内存。想象一下,如果我们一开始Active堆的大小设置为最大值,那么就很有可能造成已分配的内存分布在一个很大的范围。这样随着Dalvik虚拟机不断地运行,Active堆的内存碎片就会越来越来重。相反,如果我们施加一个Soft Limit,那可以尽量地控制已分配的内存都位于较紧凑的范围内。这样就可以有效地减少碎片。
回到函数dvmHeapSourceAlloc中,参数n描述的是要分配的内存大小,而heap->bytesAllocated描述的是Active堆已经的内存大小。由于函数dvmHeapSourceAlloc是不允许增长Active堆的大小的,因此当(heap->bytesAllocated + n)的值大于Active堆的Soft Limit时,就直接返回一个NULL值表示分配内存失败。
如果要分配的内存不会超过Active堆的Soft Limit,那么就要考虑Dalivk虚拟机在启动时是否指定了低内存模式。我们可以通过-XX:LowMemoryMode选项来让Dalvik虚拟机运行低内存模式下。在低内存模式和非低内存模块中,对象内存的分配方式有所不同。
在低内存模式中,Dalvik虚拟机假设对象不会马上就使用分配到的内存,因此,它就通过系统接口madvice和MADV_DONTNEED标志告诉内核,刚刚分配出去的内存在近期内不会使用,内核可以该内存对应的物理页回收。当分配出去的内存被使用时,内核就会重新给它映射物理页,这样就可以做按需分配物理内存,适合在内存小的设备上运行。这里有三点需要注意。
第一点是Dalvik虚拟机要求分配给对象的内存初始化为0,但是在低内存模式中,是使用函数mspace_malloc来分配内存,该函数不会将分配的内存初始化为0,因此我们需要自己去初始化这块内存。
第二点是对于被系统接口madvice标记为MADV_DONTNEED的内存,是不需要我们将它初始化为0的,一来是因为这是无用功(对应的物理而可能会被内核回收),二来是因为当这些内存在真正使用时,内核在为它们映射物理页的同时,也会同时映射的物理页初始为0。
第三点是在调用系统接口madvice时,指定的内存地址以及内存大小都必须以页大小为边界的,但是函数mspace_malloc分配出来的内存的地址只能保证对齐到8个字节,因此,我们是有可能不能将所有分配出来的内存都通过系统接口madvice标记为MADV_DONTNEED的。这时候对于不能标记为MADV_DONTNEED的内存,就需要调用memset来将它们初始化为0。
在非低内存模式中,处理的逻辑就简单很多了,直接使用函数mspace_calloc在Active堆上分配指定的内存大小即可,同时该函数还会将分配的内存初始化为0,正好是可以满足Dalvik虚拟机的要求。
注意,由于内存碎片的存在,即使是要分配的内存没有超出Active堆的Soft Limit,在调用函数mspace_malloc和函数mspace_calloc的时候,仍然有可能出现无法成功分配内存的情况。在这种情况下,都直接返回一个NULL值给调用者。
在分配成功的情况下,函数dvmHeapSourceAlloc还需要做两件事情。
第一件事情是调用函数countAllocation来计账,它的实现如下所示:
- static void countAllocation(Heap *heap, const void *ptr)
- {
- assert(heap->bytesAllocated < mspace_footprint(heap->msp));
- heap->bytesAllocated += mspace_usable_size(ptr) +
- HEAP_SOURCE_CHUNK_OVERHEAD;
- heap->objectsAllocated++;
- HeapSource* hs = gDvm.gcHeap->heapSource;
- dvmHeapBitmapSetObjectBit(&hs->liveBits, ptr);
- assert(heap->bytesAllocated < mspace_footprint(heap->msp));
- }
函数countAllocation要计的账有三个:
1. 记录Active堆当前已经分配的字节数。
2. 记录Active堆当前已经分配的对象数。
3. 调用函数dvmHeapBitmapSetObjectBit将新分配的对象在Live Heap Bitmap上对应的位设置为1,也就是说将新创建的对象标记为是存活的。关于Live Heap Bitmap,可以参考前面Dalvik虚拟机Java堆创建过程分析一文。
回到函数dvmHeapSourceAlloc中,它需要做的第二件事情是检查当前Active堆已经分配的字节数是否已经大于预先设定的Concurrent GC阀值heap->concurrentStartBytes。如果大于的话,那么就需要通知GC线程执行一次Concurrent GC。当然,如果当前GC线程已经在进行垃圾回收,那么就不用通知了。当gDvm.gcHeap->gcRunning的值等于true时,就表示GC线程正在进行垃圾回收。
这样,函数dvmHeapSourceAlloc的实现就分析完成了,接下来我们继续分析另外一个函数dvmHeapSourceAllocAndGrow的实现,如下所示:
- void* dvmHeapSourceAllocAndGrow(size_t n)
- {
- ......
- HeapSource *hs = gHs;
- Heap* heap = hs2heap(hs);
- void* ptr = dvmHeapSourceAlloc(n);
- if (ptr != NULL) {
- return ptr;
- }
- size_t oldIdealSize = hs->idealSize;
- if (isSoftLimited(hs)) {
- ......
- hs->softLimit = SIZE_MAX;
- ptr = dvmHeapSourceAlloc(n);
- if (ptr != NULL) {
- ......
- snapIdealFootprint();
- return ptr;
- }
- }
- ptr = heapAllocAndGrow(hs, heap, n);
- if (ptr != NULL) {
- ......
- snapIdealFootprint();
- } else {
- ......
- setIdealFootprint(oldIdealSize);
- }
- return ptr;
- }
这个函数定义在文件dalvik/vm/alloc/HeapSource.cpp中。
函数dvmHeapSourceAllocAndGrow首先是在不增加Active堆的前提下,调用我们前面分析的函数dvmHeapSourceAlloc来分配大小为n的内存。如果分配成功,那么就可以直接返回了。否则的话,继续往前处理。
在继续往前处理之前,先记录一下当前Zygote堆和Active堆的大小之和oldIdealSize。这是因为后面我们可能会修改Active堆的大小。当修改了Active堆的大小,但是仍然不能成功分配大小为n的内存,那么就需要恢复之前Zygote堆和Active堆的大小。
如果Active堆设置有Soft Limit,那么函数isSoftLimited的返回值等于true。在这种情况下,先将Soft Limit去掉,再调用函数dvmHeapSourceAlloc来分配大小为n的内存。如果分配成功,那么在将分配得到的地址返回给调用者之前,需要调用函数snapIdealFootprint来修改Active堆的大小。也就是说,在去掉Active堆的Soft Limit之后,可以成功地分配到大小为n的内存,这时候就需要相应的增加Soft Limit的大小。
如果Active堆没有设置Soft Limit,或者去掉Soft Limit之后,仍然不能成功地在Active堆上分配在大小为n的内存,那么这时候就得出大招了,它会调用函数heapAllocAndGrow将Java堆的大小设置为允许的最大值,然后再在Active堆上分配大小为n的内存。
最后,如果能成功分配到大小为n的内存,那么就调用函数snapIdealFootprint来重新设置Active堆的当前大小。否则的话,就调用函数setIdealFootprint来恢复之前Active堆的大小。这是因为虽然分配失败,但是前面仍然做了修改Active堆大小的操作。
为了更好地理解函数dvmHeapSourceAllocAndGrow的实现,我们继续分析一下涉及到的函数isSoftLimited、setIdealFootprint、snapIdealFootprint和heapAllocAndGrow的实现。
函数isSoftLimited的实现如下所示:
- static bool isSoftLimited(const HeapSource *hs)
- {
- /* softLimit will be either SIZE_MAX or the limit for the
- * active mspace. idealSize can be greater than softLimit
- * if there is more than one heap. If there is only one
- * heap, a non-SIZE_MAX softLimit should always be the same
- * as idealSize.
- */
- return hs->softLimit <= hs->idealSize;
- }
根据我们前面的分析,hs->softLimit描述的是Active堆的大小,而hs->idealSize描述的是Zygote堆和Active堆的大小之和。
当只有一个堆时,即只有Active堆时,如果设置了Soft Limit,那么它的大小总是等于Active堆的大小,即这时候hs->softLimit总是等于hs->idealSize。如果没有设置Soft Limit,那么它的值会被设置为SIZE_MAX值,这会就会保证hs->softLimit大于hs->idealSize。也就是说,当只有一个堆时,函数isSoftLimited能正确的反映Active堆是否设置有Soft Limit。
当有两个堆时,即Zygote堆和Active堆同时存在,那么如果设置有Soft Limit,那么它的值就总是等于Active堆的大小。由于hs->idealSize描述的是Zygote堆和Active堆的大小之和,因此就一定可以保证hs->softLimit小于等于hs->idealSize。如果没有设置Soft Limit,即hs->softLimit的值等于SIZE_MAX,那么就一定可以保证hs->softLimit的值大于hs->idealSize的值。也就是说,当有两个堆时,函数isSoftLimited也能正确的反映Active堆是否设置有Soft Limit。
函数setIdealFootprint的实现如下所示:
- static void setIdealFootprint(size_t max)
- {
- HS_BOILERPLATE();
- HeapSource *hs = gHs;
- size_t maximumSize = getMaximumSize(hs);
- if (max > maximumSize) {
- LOGI_HEAP("Clamp target GC heap from %zd.%03zdMB to %u.%03uMB",
- FRACTIONAL_MB(max),
- FRACTIONAL_MB(maximumSize));
- max = maximumSize;
- }
- /* Convert max into a size that applies to the active heap.
- * Old heaps will count against the ideal size.
- */
- size_t overhead = getSoftFootprint(false);
- size_t activeMax;
- if (overhead < max) {
- activeMax = max - overhead;
- } else {
- activeMax = 0;
- }
- setSoftLimit(hs, activeMax);
- hs->idealSize = max;
- }
函数setIdealFootprint的作用是要将Zygote堆和Active堆的大小之和设置为max。在设置之前,先检查max值是否大于Java堆允许的最大值maximum。如果大于的话,那么就属于将max的值修改为maximum。
接下为是以参数false来调用函数getSoftFootprint来获得Zygote堆的大小overhead。如果max的值大于Zygote堆的大小overhead,那么从max中减去overhead,就可以得到Active堆的大小activeMax。如果max的值小于等于Zygote堆的大小overhead,那么就说明要将Active堆的大小activeMax设置为0。
最后,函数setIdealFootprint调用函数setSoftLimit设置Active堆的当前大小,并且将Zygote堆和Active堆的大小之和记录在hs->idealSize中。
这里又涉及到两个函数getSoftFootprint和setSoftLimit,我们同样对它们进行分析。
函数getSoftFootprint的实现如下所示:
- static size_t getSoftFootprint(bool includeActive)
- {
- HS_BOILERPLATE();
- HeapSource *hs = gHs;
- size_t ret = oldHeapOverhead(hs, false);
- if (includeActive) {
- ret += hs->heaps[0].bytesAllocated;
- }
- return ret;
- }
函数getSoftFootprint首先调用函数oldHeapOverhead获得Zygote堆的大小ret。当参数includeActive等于true时,就表示要返回的是Zygote堆的大小再加上Active堆当前已经分配的内存字节数的值。而当参数includeActive等于false时,要返回的仅仅是Zygote堆的大小。
函数oldHeapOverhead的实现如下所示:
- static size_t oldHeapOverhead(const HeapSource *hs, bool includeActive)
- {
- size_t footprint = 0;
- size_t i;
- if (includeActive) {
- i = 0;
- } else {
- i = 1;
- }
- for (/* i = i */; i < hs->numHeaps; i++) {
- //TODO: include size of bitmaps? If so, don't use bitsLen, listen to .max
- footprint += mspace_footprint(hs->heaps[i].msp);
- }
- return footprint;
- }
从这里就可以看出,当参数includeActive等于true时,函数oldHeapOverhead返回的是Zygote堆和Active堆的大小之和,而当参数includeActive等于false时,函数oldHeapOverhead仅仅返回Zygote堆的大小。注意,hs->heaps[0]指向的是Active堆,而hs->heaps[1]指向的是Zygote堆。这一点可以参考前面Dalvik虚拟机Java堆创建过程分析一文。
回到函数setIdealFootprint中,我们继续分析函数setSoftLimit的实现,如下所示:
- static void setSoftLimit(HeapSource *hs, size_t softLimit)
- {
- ......
- mspace msp = hs->heaps[0].msp;
- size_t currentHeapSize = mspace_footprint(msp);
- if (softLimit < currentHeapSize) {
- ......
- mspace_set_footprint_limit(msp, currentHeapSize);
- hs->softLimit = softLimit;
- } else {
- ......
- mspace_set_footprint_limit(msp, softLimit);
- hs->softLimit = SIZE_MAX;
- }
- }
函数setSoftLimit首先是获得Active堆的当前大小currentHeapSize。如果参数softLimit的值小于Active堆的当前大小currentHeapSize,那么就意味着要给Active堆设置一个Soft Limit,这时候主要就是将参数softLimit的保存在hs->softLimit中。另一方面,如果参数softLimit的值大于等于Active堆的当前大小currentHeapSize,那么就意味着要去掉Active堆的Soft Limit,并且将Active堆的大小设置为参数softLimit的值。
回到函数dvmHeapSourceAlloc中,我们继续分析最后两个函数snapIdealFootprint和heapAllocAndGrow的实现,
函数snapIdealFootprint的实同如下所示:
- static void snapIdealFootprint()
- {
- HS_BOILERPLATE();
- setIdealFootprint(getSoftFootprint(true));
- }
函数snapIdealFootprint通过调用前面分析的函数getSoftFootprint和setIdealFootprint来调整Active堆的大小以及Soft Limit值。回忆一下函数dvmHeapSourceAlloc调用snapIdealFootprint的情景,分别是在修改了Active堆的Soft Limit或者将Active堆的大小设置为允许的最大值,并且成功在Active堆分配了指定大小的内存之后进行的。这样就需要调用函数snapIdealFootprint将Active堆的大小设置为实际使用的大小(而不是允许的最大值),以及重新设置Soft Limit值。
函数heapAllocAndGrow的实现如下所示:
- static void* heapAllocAndGrow(HeapSource *hs, Heap *heap, size_t n)
- {
- ......
- size_t max = heap->maximumSize;
- mspace_set_footprint_limit(heap->msp, max);
- void* ptr = dvmHeapSourceAlloc(n);
- ......
- mspace_set_footprint_limit(heap->msp,
- mspace_footprint(heap->msp));
- return ptr;
- }
函数heapAllocAndGrow使用最激进的办法来在参数heap描述的堆上分配内存。在我们这个情景中,参数heap描述的就是Active堆上。它首先将Active堆的大小设置为允许的最大值,接着再调用函数dvmHeapSourceAlloc在上面分配大小为n的内存。接着再通过函数mspace_footprint获得分配了n个字节之后Active堆的大小,并且将该值设置为Active堆的当前大小限制。这就相当于是将Active堆的当前大小限制值从允许设置的最大值减少为一个刚刚合适的值。
至此,我们就分析完成了Dalvik虚拟机为新创建的对象分配内存的过程。只有充分理解了对象内存的分配过程之后,我们才能够更好地理解对象内存的释放过程,也就是Dalvik虚拟机的垃圾收集过程。
原文地址:http://blog.csdn.net/luoshengyang/article/details/41688319














 1346
1346











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









