







ROS中激光雷达的数据就是一串距离值,每隔1度一个距离值(具体情况得看激光雷达的参数),通过实测激光雷达的数据,将数据保存在txt文档中,在matlab中,提取关键特征,直线,圆弧等,我做的是提取两条我需要的特征直线。
首先,激光雷达的数据是一串带有很多小数点的数据,不利于计算,先用python将其转化为整数。
import numpy as np
f=open('C:/learn/1.txt')
str=f.read()
f.close()
str=str.split(',')
b=[0]
for i in str:
a=int(float(i)*1000)
b.append(a)
np.savetxt('C:/learn/data2.txt',b,'%d')上面代码的意思就是将原先的数据乘以1000后取整,用数组b保存在data2.txt中,b[0]中有一个零是因为激光雷达的数据只有360个,但是后面特征提取的程序中需要361个数据。
然后用特征提取的程序跑以下保存后的data2.txt,效果如下:
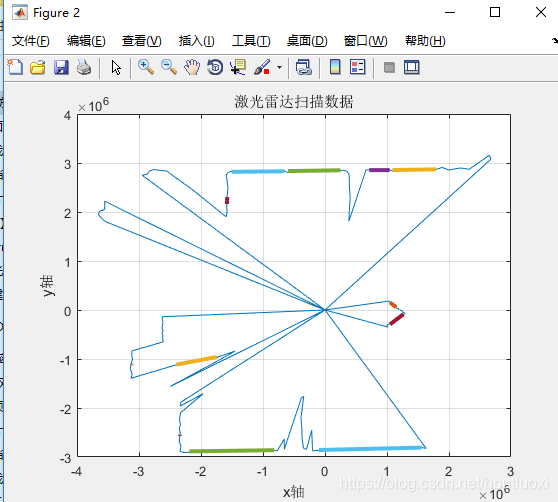
但是我只需要图中间的那部分信息,然后再将激光雷达原始的数据处理一下,处理代码:
import numpy as np
f=open('C:/learn/1.txt')
str=f.read()
f.close()
str=str.split(',')
b=[0]
for i in str:
a=int(float(i)*1000)
if a>1700:
b.append(0)
else:
b.append(a)
np.savetxt('C:/learn/data2.txt',b,'%d')该代码的意思是将大于1700的数据全部用0代替,然后再用特征提取的程序跑一遍,效果如图:
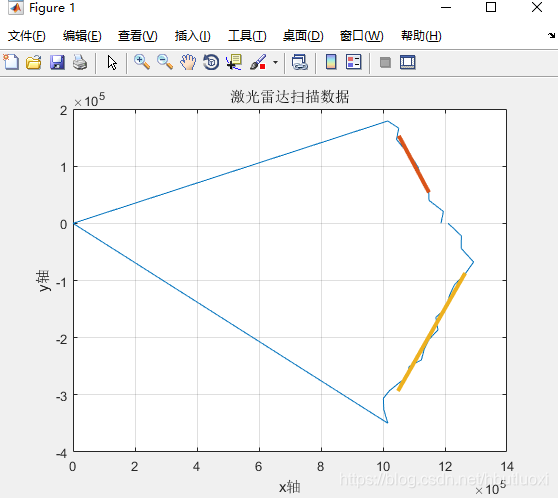
这样就能得到拟合后的效果,再运行程序的过程中注意数据的个数要匹配,361个,还有就是文件路径不要搞错了,特征提取的代码如下链接:https://download.csdn.net/download/hbutluoxi/11062026














 7890
7890











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









