



一种生物启发式的膝关节驱动器用于膝踝足矫形器
引言
膝踝足矫形器是一种长腿矫形装置,覆盖膝关节、踝关节和足部。它们通常用于辅助因股四头肌无力引起的异常行走步态 [1]。这类装置已使用很长时间;然而,由于设备功能有限且体积庞大,其接受度和长期使用率相当低 [1]。最明显的局限性与该矫形装置所提供的膝关节活动范围有关。通过解决此类局限性来改进膝踝足矫形器的设计,将使其被更频繁地处方和使用。
股四头肌无力主要由神经肌肉疾病引起。患有此类缺陷的个体在进行膝关节伸展或控制膝关节屈曲方面能力有限。在健康受试者中,股四头肌的向心收缩启动膝关节伸展,而离心收缩则控制膝关节屈曲。股四头肌无力者的行走通常伴随着站立相期间的过伸和躯干前倾,以避免使用薄弱的肌肉 [2]。这导致步态费力且不安全,造成行走速度降低和疲劳。
研究由股四头肌无力引起的异常行走有助于更好地理解此类功能障碍。
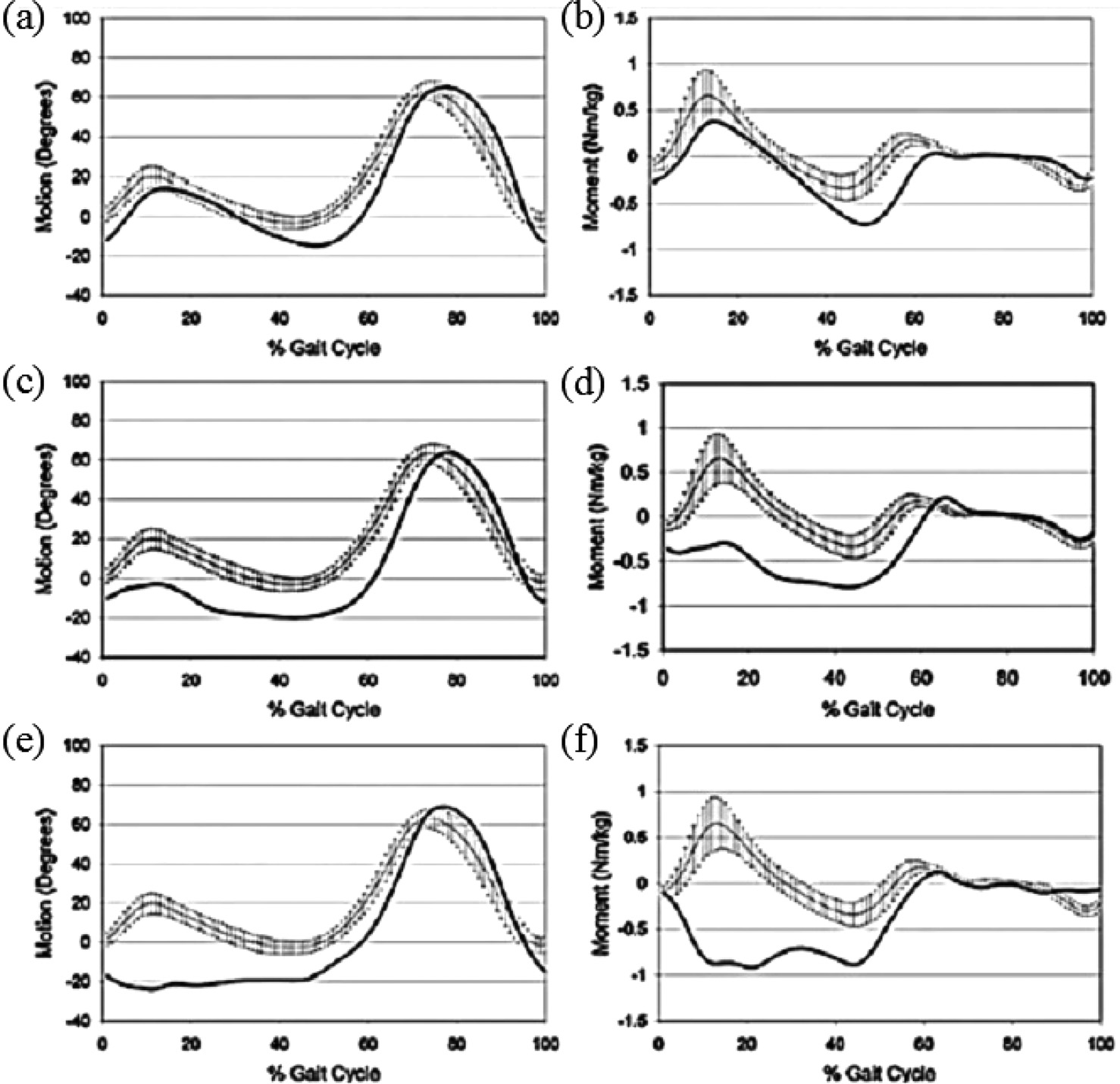 和(b)为轻度无力,(c)和(d)为中度无力,(e)和(f)为重度无力。该图取自参考文献[3]。)
和(b)为轻度无力,(c)和(d)为中度无力,(e)和(f)为重度无力。该图取自参考文献[3]。)
迄今为止,市场上已有三种类型的KAFO:被动式膝踝足矫形器、stance控制型膝踝足矫形器(SCKAFOs)和动态膝踝足矫形器。在被动式膝踝足矫形器中,膝关节在行走和站立期间保持在锁定位置,可手动解锁以实现弯曲。半动态膝踝足矫形器也称为 SCKAFOs,在站立相期间为保证稳定性而限制膝关节屈曲,并允许在摆动相期间自由活动膝关节。动态膝踝足矫形器在整个完整步行步态周期中控制膝关节。文献中已报道了三种动态膝踝足矫形器,分别由弹簧机构 [4], 气动系统 [5], 和液压系统 [6], 驱动。这些动态膝踝足矫形器体积庞大、笨重,采用复杂的控制系统,在实际应用中受到限制。
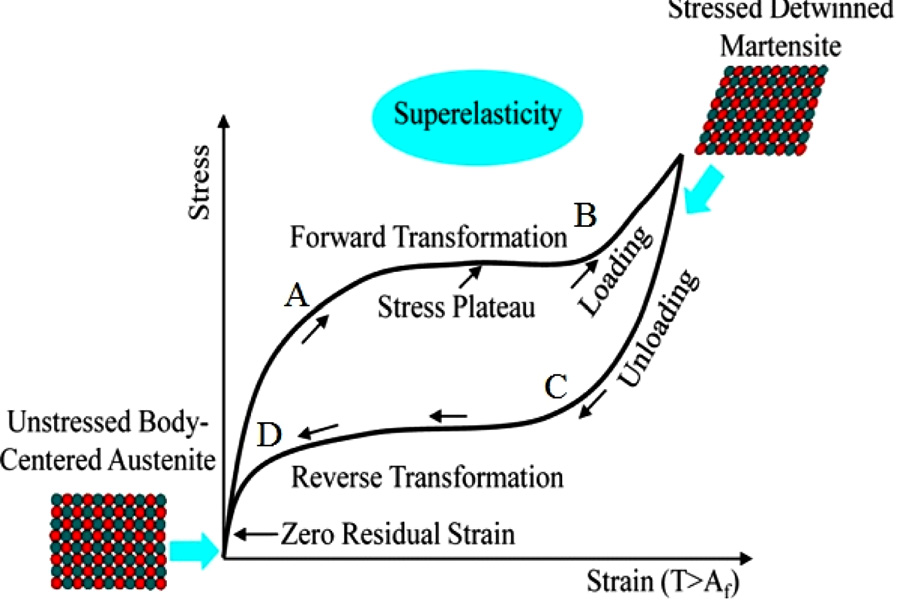
用于驱动的形状记忆合金具有生物相容性好、重量轻和体积小的优点。镍钛诺是最常见的形状记忆合金类型,在本研究中已被用于膝关节驱动器的开发。与传统金属相比,它具有更高的可恢复应变(约8%)。镍钛诺的形状恢复能力源于其在温度和/或载荷变化下奥氏体母相与马氏体相之间可逆的相变 [7]。通常情况下,镍钛诺可在三种不同相之间转换:奥氏体相(A)、孪晶马氏体相(Mt)和去孪晶马氏体相(Mdt)。每种相具有各自的晶体结构和材料特性。奥氏体相又称母相,代表材料处于高温状态;孪晶和去孪晶马氏体相则出现在低温状态。从奥氏体向马氏体的转变称为正向转变,而逆向转变是指材料从马氏体相重新转变为奥氏体相。马氏体开始温度Ms、马氏体终了温度Mf、奥氏体开始温度As和奥氏体终了温度Af是定义相变起始和结束的四个特征参数。
镍钛诺具有两种明显的热机械性能:形状记忆效应(SME)和超弹性效应(SE)。SME指的是材料在温度变化下的响应行为。当合金处于奥氏体相时,施加足够高的机械载荷即可触发超弹性效应。
 。
。
人类行走包含两个主要阶段:站立相和摆动相,分别约占整个步态周期的60%和40% [10]。站立相可进一步细分为负荷响应(步态周期的0–10%)、中期站立相(10–30%)、末站立期(30–50%)和摆动前期(50–60%),而摆动相则包括早期摆动相(60–75%)、中摆动期(75–90%)和末摆动期(90–100%)。
行走步态周期中的膝关节角度和力矩数据已有文献报道 [11],分别如图3和 4[12], 所示。
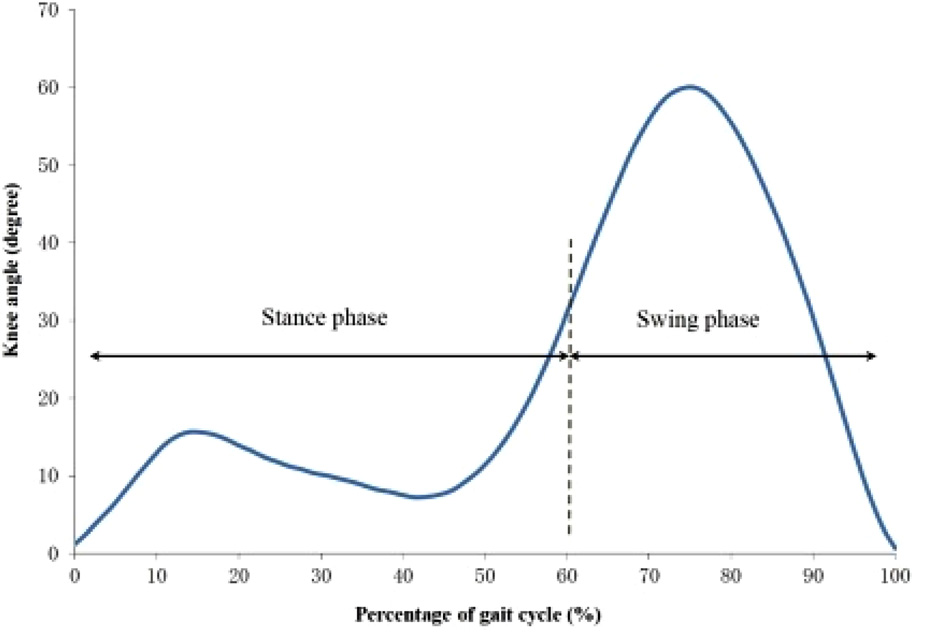
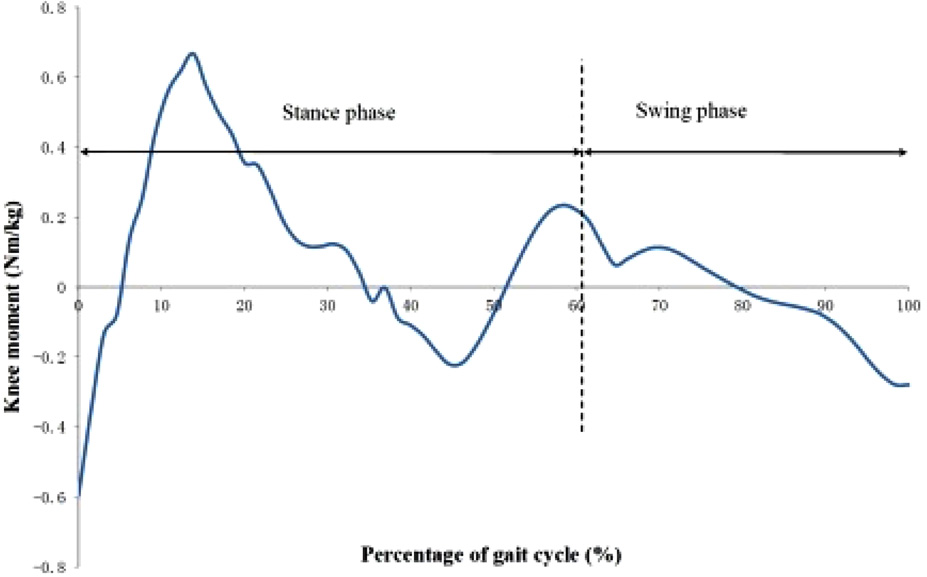 。图3显示,在足跟触地时膝关节角度接近零,随后在负荷响应期间达到约15度的屈曲。在足跟离地时,膝关节伸展至约7度。在早期摆动相结束时,膝关节达到约60度的屈曲,这是摆动相中的最大屈曲角度。在末摆动期,膝关节重新伸展至零,为下一次足跟触地做准备。图4显示,起初产生一个伸展力矩(正力矩),以控制负荷响应期间的膝关节屈曲运动。随后,出现一个屈曲力矩,用于阻尼中期站立相期间的膝关节伸展。在末站立期和摆动前期阶段,再次通过伸展力矩抵抗膝关节屈曲运动。最后,内屈力矩减缓腿部前移,为下一个步行步态周期做好准备。
。图3显示,在足跟触地时膝关节角度接近零,随后在负荷响应期间达到约15度的屈曲。在足跟离地时,膝关节伸展至约7度。在早期摆动相结束时,膝关节达到约60度的屈曲,这是摆动相中的最大屈曲角度。在末摆动期,膝关节重新伸展至零,为下一次足跟触地做准备。图4显示,起初产生一个伸展力矩(正力矩),以控制负荷响应期间的膝关节屈曲运动。随后,出现一个屈曲力矩,用于阻尼中期站立相期间的膝关节伸展。在末站立期和摆动前期阶段,再次通过伸展力矩抵抗膝关节屈曲运动。最后,内屈力矩减缓腿部前移,为下一个步行步态周期做好准备。
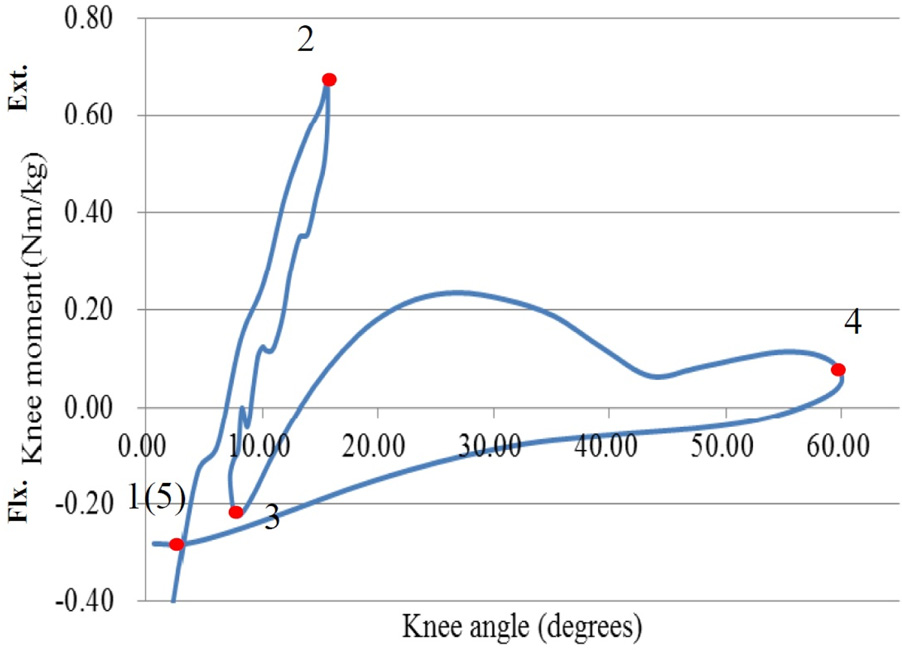
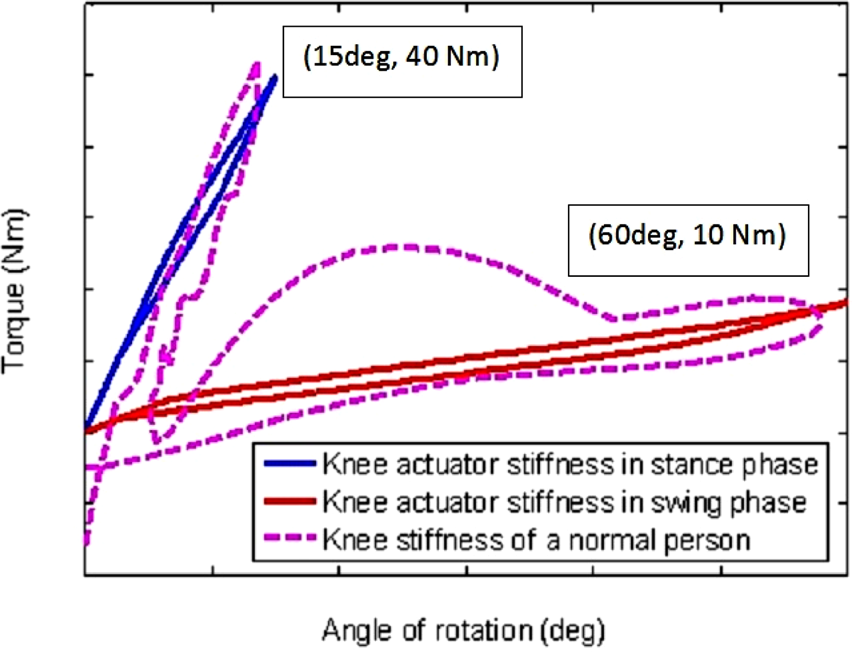
通过结合膝关节角度和力矩数据,可以计算出正常膝关节刚度,如图5所示。刚度表示关节力矩随膝关节旋转的变化情况。正常膝关节刚度在站立相和摆动相分别表现出两种不同的模式。点1(足跟触地)、点2(脚掌平放)和点3(足跟离地)标识了负荷响应和中期站立相期间的膝关节刚度曲线。而点3、点4(初期摆动结束)和点5(下一次足跟触地时完全伸展)则代表晚期站立相、预摆动相和摆动相期间的刚度曲线。如图所示,在负荷响应和中期站立相期间,膝关节刚度具有较高的斜率和较小的滞后区域;在步态周期的其余阶段,刚度表现出较低的斜率和较大的滞后性。因此,本研究提出的动态膝关节驱动器包含两个不同的部分,以便能够复制站立相和摆动相中的两种刚度曲线。执行器的设计参数也可从图5中获得。对于体重为60 kg的受试者,这两个驱动部件在站立相需产生40 N·m 扭矩并旋转15 度,在摆动相则需产生10 N·m 扭矩并旋转60 度。
在本研究中,开发了一种名为UT动态KAFO的新型装置,该装置采用结合了超弹性扭力杆和扭簧的执行器来模拟正常膝关节行为。该动态KAFO可在行走过程中实现膝关节屈曲并辅助膝关节伸展,提供正常的膝关节活动范围。
动态膝关节执行器设计
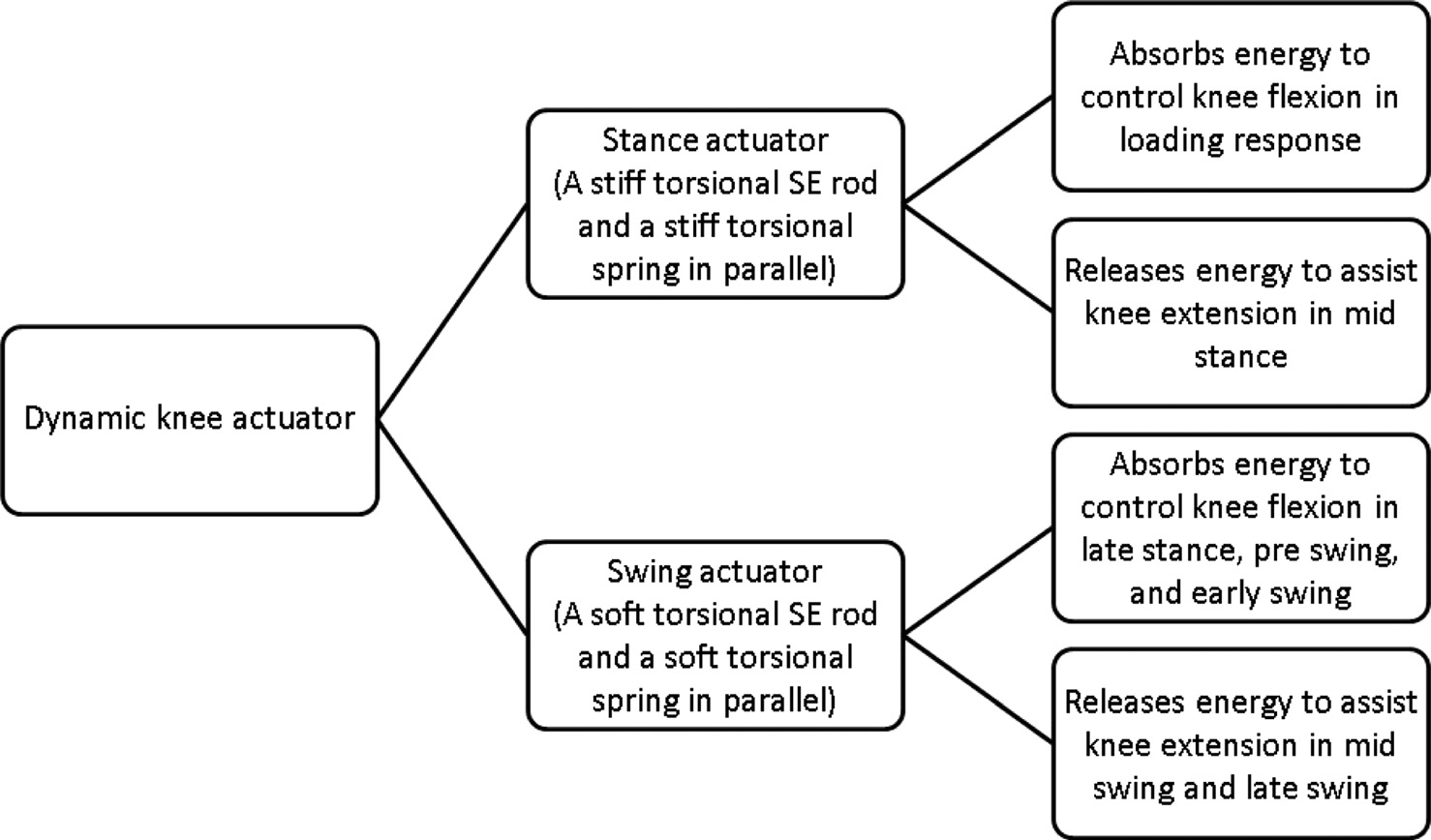
为了重现正常的膝关节刚度曲线,UT动态KAFO中的膝关节驱动器被设计为包含两个驱动部件:支撑相驱动部分和摆动相驱动部分。支撑相驱动部分包括一根高刚性超弹性扭转杆和一个高刚性扭簧,并联布置。在负荷响应阶段,它通过控制膝关节屈曲来吸收能量,随后在中期站立相释放该能量,以提供伸展辅助。摆动相驱动部分采用低刚性超弹性扭转杆和低刚性扭簧,用于控制摆动前期和早期摆动相的膝关节屈曲,并在中期和晚期摆动相辅助膝关节伸展。这两个驱动部件的设计假设使用者膝关节无伸展能力,因此执行器需要提供膝关节伸展力矩,通过输出完整的伸展扭矩来替代股四头肌的功能。这种设计适用于股四头肌无力的个体。膝关节驱动器的概念设计如图6所示。
进行了数值模拟以确定两根超弹性扭力杆的尺寸,并验证动态膝关节驱动器是否能够重现图5中所示的正常膝关节刚度曲线。由于超弹性镍钛诺合金的响应取决于加载速率,本研究完成了两种不同的模拟。第一种仿真代表慢加载速率,此时材料表现出等温转变行为。这是因为在低应变率下,材料有足够的时间与周围环境交换产生的热量。第二种仿真代表快速加载速率,显示了在假设的绝热过程中温度升高的影响。等温仿真可以为材料行为提供粗略估计,并确定两根超弹性杆的几何形状。由于一个平均行走周期约为1.2s [13], 这表明膝关节驱动器的响应时间应约为1.2秒,以满足正常行走的要求。两次模拟均在塔赫里·安达尼等人开发的基于MATLAB的三维现象学本构模型中进行 [14,15]。
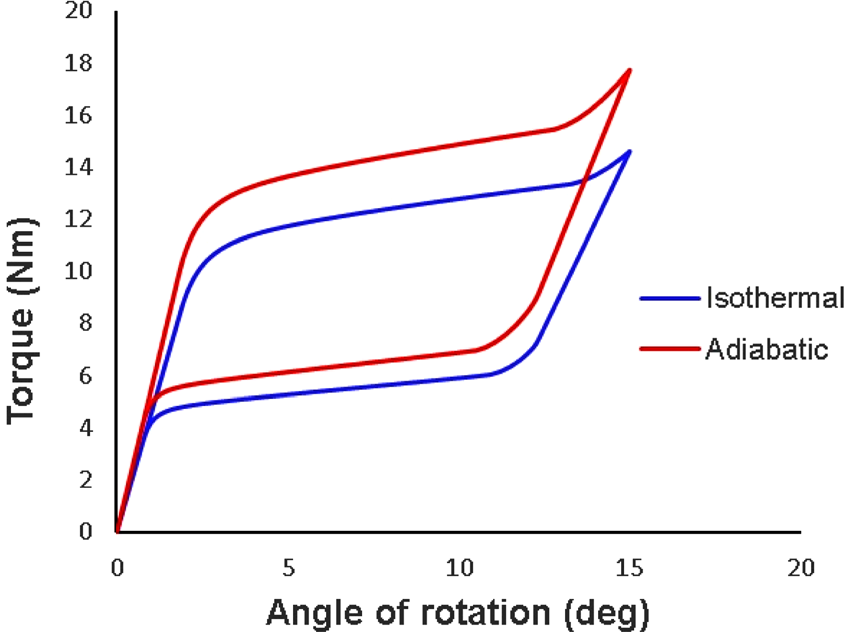
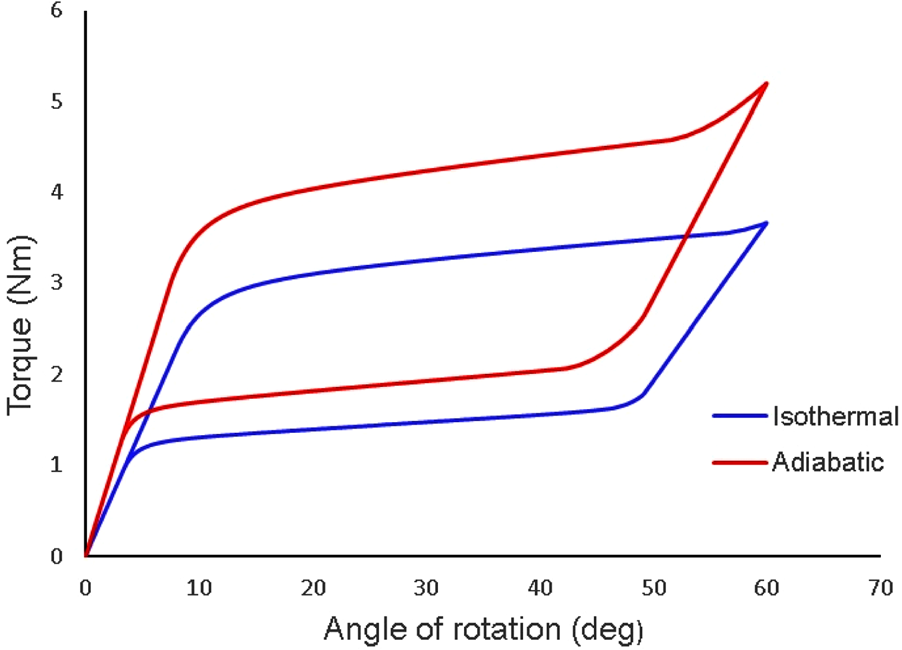
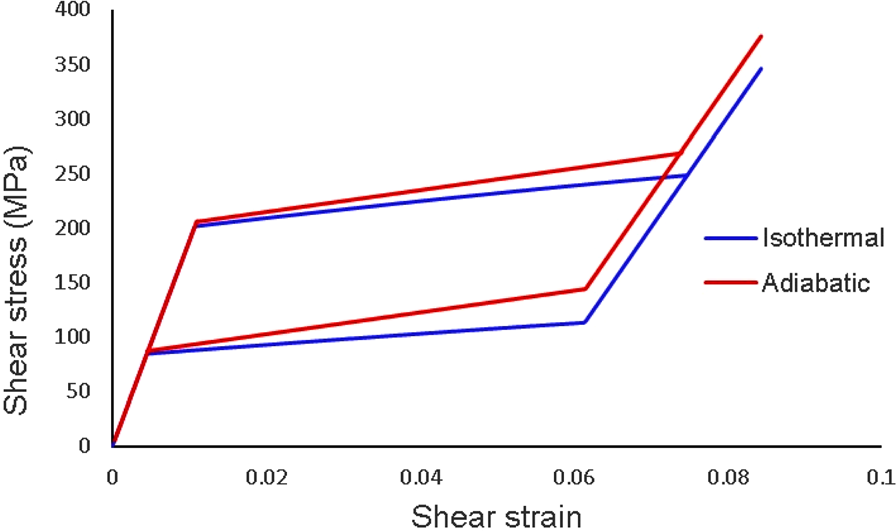
根据镍钛诺制造商的产品目录,支撑相执行器中使用的SE杆选择直径为6.40 mm、长度为11.75 mm,而摆动相执行器中的杆直径为3.80 mm、长度为26.7 mm。在两幅图中,等温与绝热仿真分别以蓝色和红色曲线表示。图7显示,在施加15度旋转时,支撑相超弹性杆在等温仿真和绝热仿真中分别产生15 N·m和18 N·m的扭矩。图8显示,在等温和绝热条件下,分别通过施加60度的旋转进行仿真。结果表明,两种仿真方法之间的扭矩差异似乎显著,因此使用适当的设计方法非常重要。
 。
。
根据上述绝热仿真结果,计算出支撑相和摆动相扭簧的刚度分别为1.4 N·m/度和0.11 N·m/度。图9中包含三条曲线。粉色曲线表示正常膝关节刚度模式。蓝色和红色曲线分别表示支撑相驱动部分和摆动相驱动部分。每条曲线均结合了超弹性镍钛诺棒和扭簧的响应。当支撑相执行器被扭转15度时,会产生40 N·m的扭矩,而当摆动相执行器被扭转60度时,会产生10 N·m的扭矩。仿真结果表明,在早期站立相和中期站立相阶段,动态膝关节驱动器的刚度与正常膝关节刚度具有良好的匹配性。因此,支撑相驱动部分在这两个阶段能够提供足够的支撑和适当的辅助。在晚期站立相、摆动前期和早期摆动相期间,摆动相执行器产生的阻力较小,因而不会阻碍正常的屈曲运动。在中摆动期和末摆动期,摆动相执行器模拟正常膝关节行为,协助伸展以准备下一次足部触地。
为了开发具有良好重复性的动态膝关节驱动器,必须研究两个超弹性杆的应力‐应变关系,以确保材料工作在弹性变形区。结果如下所示。
在这两幅图中,等温和绝热仿真分别用蓝色和红色曲线表示。两种仿真结果之间没有显著差异。在绝热条件下,支撑相杆达到约8%剪切应变和380 兆帕剪切应力,而摆动相杆产生约8%剪切应变和330兆帕剪切应力。由于超弹性镍钛诺的屈服强度和最大可恢复剪切应变分别约为600 兆帕和8%,因此两个超弹性杆均处于弹性变形区。
动态膝关节的所有支撑部件均根据两根超弹性扭力杆的几何形状设计。通常,动态膝关节模块由两个框架组成,其概念设计如图12[12] 所示。它们被称为膝关节的内侧和外侧框架(零件1 和2),可分别与小腿和大腿段连接。两个膝关节驱动部件(零件3 和4)安装在两个框架之间。支撑相执行器(零件3)仅在站立相期间激活,而摆动相驱动器(零件4)仅在摆动相期间工作。两个电磁阀(零件5)通过脚跟接触信号控制这两个执行器,使其接合或分离。动态膝关节具有三种工作模式:自由模式、锁定模式和动态模式。在自由模式下,大腿段和小腿段可围绕膝关节轴自由旋转。在锁定模式下,膝关节固定于完全伸展位置,此时装置作为被动式膝踝足矫形器使用。在动态模式下,两个执行器根据力敏电阻(FSR)开关的信号进行交互。开发了一套控制系统以实现三种工作模式之间的转换。该系统包括一个控制电路、一块Arduino Uno开发板(Arduino 公司,马萨诸塞州萨默维尔)以及安装在脚跟处的0.5英寸力敏电阻(Sparkfun 电子公司,科罗拉多州尼沃特)。控制电路中嵌入了一个触觉按钮开关。短按此按钮可开启两个电磁阀,进入自由模式;再次短按则关闭电磁阀,激活锁定模式;长按触觉按钮则进入动态模式,此时两个电磁阀将根据力敏电阻的信号相互作用。
在动态模式下,当矫形器侧下肢足跟触地时,支撑相执行器被激活,并在整个站立相期间保持工作状态。该激活是由于力敏电阻传感器检测到的体重所引起的,进而触发了支撑相执行器的电路。该执行器在吸收能量的同时,产生足够的支撑在负荷响应期间允许膝关节屈曲。在站立中期阶段,支撑相执行器通过释放先前储存的能量来辅助膝关节伸展运动。两个执行器之间的切换发生在矫形器侧下肢的足跟离地时。摆动相驱动器在其余步行周期中启动,控制膝关节屈曲,并在晚期站立相、摆动前期和摆动相期间辅助膝关节伸展。
运动分析研究
数据来自一名健康受试者(女性:28岁,体重47.6公斤),该受试者无任何影响其行走能力的神经肌肉问题。本研究已获得托莱多大学生物医学IRB(机构审查委员会)批准,受试者签署了所需的知情同意书。测试在托莱多大学工程学院的生物力学与辅助技术实验室进行。实验设备包括一套校准过的十相机Raptor‐E数字实时分析系统(Motion Analysis 公司,加利福尼亚州圣罗莎)、两个Optima 464508‐200测力台(Advanced Mechanical Technology公司,马萨诸塞州沃特敦)以及一套TrignoTM无线肌电图(EMG)系统,配备八个肌电传感器(Delsys公司,马萨诸塞州纳蒂克)。这三种系统的数据采集频率分别为120赫兹、720赫兹和720赫兹。
针对三种不同情况采集了运动数据:(a)不佩戴 KAFO的正常行走;(b)在锁定模式下佩戴KAFO行走;以及(c)在动态模式下佩戴KAFO行走。每种情况下均采集五次试验的数据,并取其平均值。在受试者身上放置反光标记点以识别下肢节段。本研究采用了Helen Hayes标记点集合 [16]。测试时不佩戴KAFO时,所有标记点直接贴附于双侧下肢。然而,在佩戴KAFO进行测试时,标记点被固定在矫形器和对侧下肢上,如图14所示。在矫形器侧下肢,标记点放置于第五跖骨、KAFO足部部分的脚跟、KAFO膝关节和踝关节的内侧和外侧,以及KAFO小腿和大腿段的外侧支架上。在对侧下肢,标记点放置于第五跖骨、脚跟、内踝和外踝(踝关节)、股骨内上髁和外上髁(膝关节),以及小腿和大腿段的外侧。此外,在左右髂前上棘以及两个髂后上棘的中间位置也放置了标记点。两个无线EMG传感器被放置于双侧股直肌肌腹处,以检测股四头肌活动。摄像系统采集的所有标记点的三维位置数据与肌电图和地面反作用力数据同步。使用6赫兹低通巴特沃斯滤波器对所有数据进行平滑处理。
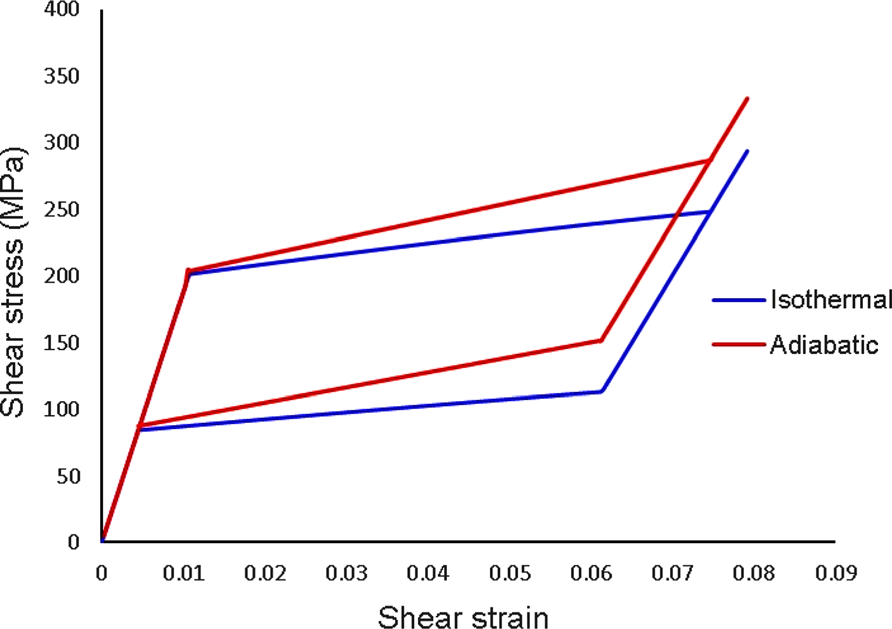
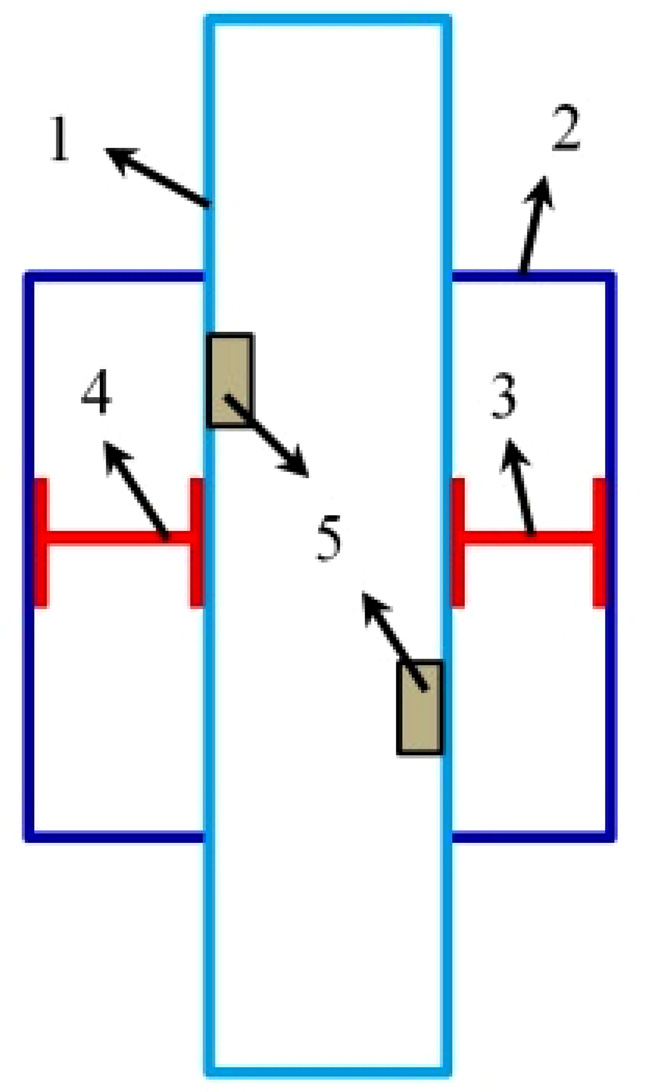
图15显示了步态周期中膝关节屈曲角度的变化情况。该图包含三条曲线:红色曲线对应未佩戴KAFO时的正常行走;蓝色和绿色曲线分别代表在锁定模式和动态模式下佩戴KAFO行走。在正常行走过程中,膝关节角度在整个步态周期内呈现两个峰值,受试者在站立相期间达到约10度的屈曲角度,在摆动相期间约为50度。当在锁定模式下佩戴KAFO行走时,由于膝关节被固定在完全伸展位置,整个步态周期中的膝关节角度接近零。锁定式KAFO产生的行走步态与正常行走有显著差异。而在动态模式下佩戴KAFO行走时,膝关节角度的变化模式与正常行走非常相似,站立相期间的最大膝关节屈曲角度约为7度,摆动相期间约为42度。
三种行走状态下的体重归一化的膝关节力矩曲线如图16所示,其中包括三个图表。该膝关节力矩是根据地面反作用力和肢体节段运动的动力学计算得出的。在正常行走条件下,该图显示在负荷响应和中期摆动相期间出现了内伸展力矩(正力矩),这两个时期的峰值分别约为0.4 N·m/kg和0.1 N·m/kg。在锁定模式下佩戴KAFO行走产生了类似的膝关节力矩模式,但内伸展力矩较小(最大值达0.3 N·m/kg)。在动态模式下佩戴KAFO行走则在整个步态周期中重现了相同的力矩曲线,且内伸展力矩更高(峰值分别达0.5 N·m/kg和0.3 N·m/kg)。此外,在此条件下,末期站立相期间还观察到了较高的屈曲力矩(最高达0.2 N·m/kg)。
讨论
被动式膝踝足矫形器、SCKAFOs和动态膝踝足矫形器是市场上三种主要类型的膝踝足矫形器。每种类型都有其自身的局限性。被动式膝踝足矫形器是最传统的类型,旨在为膝关节提供足够的稳定性。在开发这些装置时采用了不同的锁定机制,例如下落锁、提环锁、棘轮锁等。[17–19]。被动式膝踝足矫形器在这三种类型中重量最轻且成本最低。由于膝关节的刚性,这类装置导致僵硬步态。此外,为了向前移动矫形器侧下肢,需要进行一些代偿动作(如抬髋、划圈步态或支撑跳跃),从而引起较高的能量消耗。在许多情况下,被动式膝踝足矫形器仅用于初步康复,并在后续的日常生活中被弃用。
SCKAFOs在站立相期间阻止膝关节运动,并在摆动相期间释放关节。它们采用不同的机制来控制膝关节。SCKAFOs的缺点包括成本高、重量大、无法辅助膝关节伸展,以及在站立相和摆动相之间切换不平滑。奥托博克Free Walk/贝克尔骨科UTX [20], 、贝克尔骨科9001电子膝brace [20]和电机驱动的 SCKAFO[21]是三种典型的SCKAFOs。第一种使用弹簧加载棘爪锁,在膝关节达到完全伸展时将其锁定,从而使膝关节在站立相期间无法旋转。10度踝背屈有助于在摆动相释放膝关节以实现自由旋转。第二种SCKAFO[20]包含一个电磁执行器和两个棘轮板。使用该装置时,由于棘轮机构的作用,在站立相期间膝关节屈曲被阻止,但伸展是自由的。第三种SCKAFO [21]由一个电动执行器、连杆机构和齿轮箱组成,在站立相期间锁定膝关节,并在摆动相期间产生屈曲和伸展力矩。通过允许在摆动相中的自由运动,SCKAFOs与被动式膝踝足矫形器相比,可提供更平滑的步态,并避免相关的代偿动作。然而,在早期站立相锁定膝关节会导致矫形器侧下肢突然撞击和加载,以及对侧下肢离地时出现轻微的支撑跳跃。
动态膝踝足矫形器旨在控制整个步行周期中的膝关节运动。压缩弹簧驱动的膝踝足矫形器[4]允许膝关节屈曲,并在整个步态过程中提供伸展力矩。气动动力膝踝足矫形器[5]在站立相和摆动相期间产生主动的膝关节屈曲和伸展力矩。液压驱动的C‐BraceVR[6]通过产生屈曲和伸展阻尼力矩,避免行走过程中任何不受控制的膝关节运动。该设备无法提供伸展辅助,而这对严重股四头肌无力的患者至关重要。目前只有 C‐BraceVR已实现商业化,其余两种仍局限于实验室环境。体积庞大、复杂的控制系统以及功能受限等因素也限制了动态膝踝足矫形器在潜在用户中的接受度。
在本研究中,UT动态KAFO在锁定模式和动态模式下进行了测试。与锁定模式下僵硬的行走步态相比,在动态模式下观察到接近正常的行走模式,该模式允许在站立相和摆动相期间均发生膝关节屈曲运动。站立相中的屈曲有助于缓解矫形器侧下肢在早期站立相时的突然冲击和加载。在摆动相允许膝关节屈曲可避免一些代偿动作,如抬髋和腿部划圈。在动态模式下佩戴KAFO行走时,站立相和摆动相的最大屈曲角度分别约为7度和42度,比正常值低约30%和16%。这可能由三个原因导致。首先,动态膝关节驱动器的设计基于使用者体重约为60 kg的假设。由于受试者体重较轻,可能无法按设计要求充分扭转执行器。其次,为了实现膝关节屈曲,受试者必须克服装置本身的重量以及执行器的阻力,这也导致了膝关节屈曲角度的减小。第三,受试者需特别注意其行走步态,以确保在两个驱动部件之间顺利切换,这也影响了膝关节屈曲角度的变化模式。
此外,动态执行器应能辅助膝关节伸展运动。为了评估这种辅助效果,使用了肌电传感器来检测股四头肌活动。然而,肌电信号在正常行走与在动态模式下佩戴KAFO行走之间并未显示出明显差异。因此,由于测试对象没有股四头肌问题,并且可能仍然依赖自身的膝关节伸肌,执行器的伸展辅助作用无法得到验证。需要通过纳入更多受试者,特别是股四头肌较弱的个体,进行进一步的运动测试。
总之,研究发现使用UT动态KAFO能够重现正常的膝关节力矩曲线。在动态模式下,该曲线遵循与正常步行状态相同的模式,但在脚掌平放阶段(比正常步行高出25%)和中摆动期末端(比正常步行高出200%)观察到更高的伸展力矩,导致力矩模式更为僵硬。此外,在足跟离地附近观察到较大的内屈力矩(比正常步行高出300%),因为受试者有意伸展膝关节以克服装置的重量并达到完全伸展位置,从而顺利切换执行器。
该动态膝关节驱动器存在一些局限性,需要在今后的工作中加以改进。首先,当前设计适用于体重不超过60kg的使用者,对于超过此重量的人可能无法提供足够的支撑。通过结合不同刚度的超弹性镍钛诺棒和扭簧,所提出的膝关节驱动器可定制以满足不同个体的动力学需求。其次,支撑相和摆动相驱动器仅在完全伸展位置。使用者必须密切关注其行走步态,在足跟触地和足跟离地之前伸展膝盖,以在两个驱动部件之间正确切换。第三,尽管该动态执行器有潜力匹配正常行走的非线性刚度模式,但目前阶段产生的几乎是线性刚度曲线。系统应进行改进,使站立相的刚度具有更大的滞后性,并在摆动相具有更明显的滞后性。最后,UT动态KAFO比典型的被动装置重约2.5磅。该重量与当前SCKAFOs[20]相当,并且至少比C‐BraceVR动态KAFOs[6]轻20%。为了使该设备能够被广泛接受并用于日常生活,动态膝关节的体积和重量需要进一步减小。
结论
被动式膝踝足矫形器始终锁定膝关节,导致行走时能量消耗高并需要代偿动作。因此,超过60%(高达100%)的预期使用者放弃了这类支具。在过去的20年中,新型设计不断发展,允许在步态周期的摆动相(SCKAFOs)或站立相和摆动相期间进行屈曲(动态膝踝足矫形器)。然而,这些设计存在局限性,限制了其在潜在用户中的广泛接受。UT动态KAFO似乎具有前景,因其有望使用小型且低成本的装置重现正常膝关节行为。通过运动测试已评估了该动态膝踝足矫形器的可行性。使用该装置时,整个步态周期中均允许膝关节屈曲运动,并成功再现了接近正常的膝部运动曲线。未来还需开展涉及更多受试者的测试,并对该装置进行进一步改进。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









