









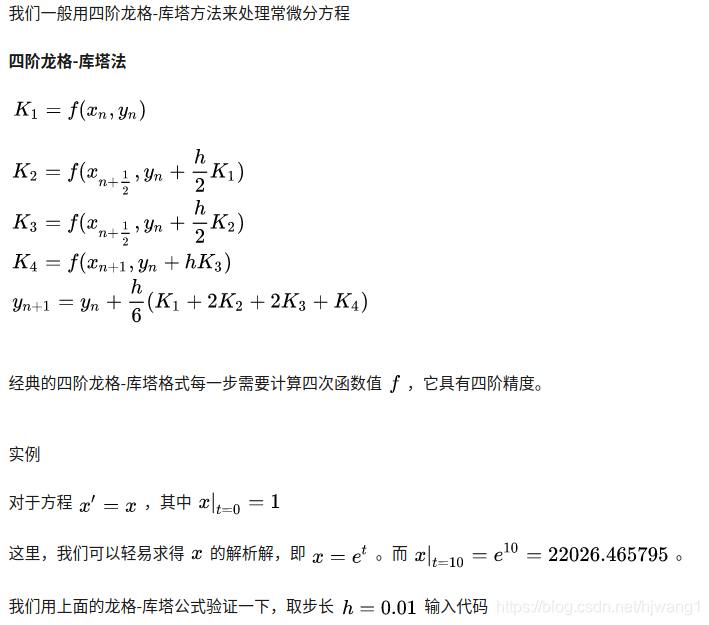
对于方程y'=f(x,y),初始条件:y(x0)=y0,
#include<stdio.h>
FILE *fp=fopen("ex的值.dat","w");
double func(double x)
{
return x;
}
void tworder(double x_0, double h, double t_0, double t_n)
{
double n=(t_n-t_0)/h;
double t=t_0, x=x_0;
double k1, k2, k3, k4;
int i;
printf("%f\t%f\n", t, x);
fprintf(fp,"%f\t%f\n", t, x);
for(i=1;i<=n;i++)
{
k1=func(x);
k2=func(x+k1*h/2);
k3=func(x+k2*h/2);
k4=func(x+k3*h);
x=x+(k1+2*k2+2*k3+k4)*h/6;
t=t+h;
printf("%f\t%f\n", t, x);
fprintf(fp,"%f\t%f\n", t, x);
}
}
int main()
{
double h=0.01;
double x_0=1;
double t_0=0, t_n=10;
tworder(x_0, h, t_0, t_n);
fclose(fp);
return 0;
}
运行后得到x(t=10)=e^10=22026.465777
用龙格-库塔法计算的结果并不是绝对精确。但是,只要时间 t取值不要太大,误差的范围仍然是可以接受的。
实践应用:姿态四元数微分方程
% 四元数微分方程的4阶龙格库塔法
% q0:4*1,rotation vector from body-frame to world-frame
% gyro:陀螺仪数据
% T:更新周期
function [ q ] = Quaternion_RungeKutta4( q0,gyro,T)
q0=Norm_Quaternion(q0); %归一化
K1= Quaternion_Diff( gyro,q0);
q1=Norm_Quaternion(q0+T/2*K1);
K2 = Quaternion_Diff(gyro,q1);
q2=Norm_Quaternion(q0+T/2*K2);
K3 = Quaternion_Diff(gyro,q2);
q3=Norm_Quaternion(q0+T*K3);
K4 = Quaternion_Diff(gyro,q3);
q = q0 + T/6*(K1+2*K2+2*K3+K4);
q = Norm_Quaternion(q);
end
% 函数功能:四元数微分方程
% 输 出:四元数的一阶导数
% 备 注:连续域
function [ q_diff ] = Quaternion_Diff( gyro,q)
A = [ 0, -gyro(1)/2, -gyro(2)/2, -gyro(3)/2;
gyro(1)/2, 0, gyro(3)/2, -gyro(2)/2;
gyro(2)/2, -gyro(3)/2, 0, gyro(1)/2;
gyro(3)/2, gyro(2)/2, -gyro(1)/2, 0];
q_diff = A*q;
end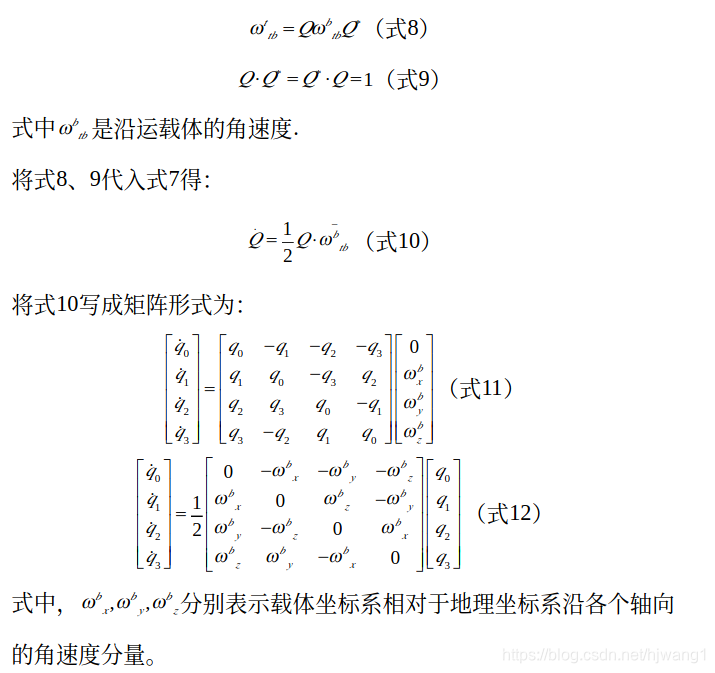














 7144
7144











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









