







感谢大神分享:https://zhuanlan.zhihu.com/p/137551862
一、 概述
前两篇文章,我们分别介绍了 分立级标定和系统级标定,所谓 分立级标定,就是以转台输入为基准,通过转动转台构建方程,对各个参数分别独立求解。
所谓 系统级标定,就是把所有误差参数看做一个导航系统的一部分,通过观测导航误差,反推出器件误差。
今天介绍的 基于迭代优化的标定,其思想介于两者之间。由于同样不使用转台,它不能像分立级那样能把每个参数独立拆开,但也没有像系统级那样,
把所有参数都扔到一个系统里,而是把参数拆成 两类:加速度计参数、陀螺仪参数。
两类参数各属于一个系统:加速度计系统、陀螺仪系统,加速度计系统一次性估计加速度计所有参数,陀螺仪系统利用加速度计系统的估计结果,
一次性估计陀螺仪所有参数。从这个角度讲,这种方法可以叫做半系统级标定。 这种思路的典型代表是一个开源方法 imu_tk。
代码地址:https://github.com/Kyle-ak/imu_tk
论文名称:《A Robust and Easy to Implement Method for IMU Calibration without External Equipments》
这项工作也是在前人的基础上做出来的,前人的工作都在它的参考文献里了,如果有对这一思路的前世今生感兴趣的,可以顺着参考文献一路找下去。
二、整体思路
1. 加速度计参数估计
对于加速度计参数的估计,虽然没有转台做基准,但是地球重力加速度是天然存在的基准,我们可以使用它做真值,然而,
重力在每个坐标轴上的分量是未知的,所以就只能使用测量到的三轴加速度 矢量和 与重力做比较,而且只能比较它们的模。
基于解方程的思想,只停留在一个位置,这个方程是不可解的,所以我们要多停留几个位置,当方程数足够的时候,便可以使用LM优化去解这个方程了。
2. 陀螺仪参数估计
对于陀螺仪参数估计,也是没有转台,按照上面估计加速度计参数的思路,我们可能会想到用地球自转角速度做输入,用角速度矢量的模作比较,
去优化求解,但很遗憾,地球自转角速度只有15°/h,对于很多mems器件来讲,自身的零偏不稳定性可能都比这个值要大。当一个方程里干扰项
比真实输入还大的时候,去解这个方程是没有意义的。
地球自转用不了了,而自然界中的天然输入只有它和重力加速度,所以我们就要考虑陀螺仪参数的估计是不是也能使用重力做基准。
答案当然是可以,虽然陀螺仪不能直接敏感重力加速度,但是陀螺仪可以计算姿态,而重力分解到加速度计的三个轴上的时候,
必须借助姿态才能分解。旋转IMU的时候,陀螺仪误差会体现到姿态误差中去,按照这个姿态对重力分解,得到的三轴加速度自然也是有误差的,
而加速度计测量的就是真实加速度,测量值与分解值之差,便可作为观测误差,使用迭代优化进行求解了。
3. 转位方案
我们以前提过,一个方程可不可解,和你使用什么样的参数拟合方法无关,完全是由方程中各未知数的系数决定的。当方程数量不够时,
就要改变这个系数构建新的方程。转动IMU就是在构建新的方程,所以,以前分立级的时候怎么转,现在还怎么转,就可以保证所有参数都可解。
放一张操作流程图吧:

三、算法细节
1. 误差模型
我们上一篇介绍系统级标定的时候,指出器件误差模型分为 24项和21项两类,而24项只适合分立级标定这种已知真实输入的方法,
本次介绍的方法显然每个轴的加速度和角速度真实输入是未知的,所以需要采用21项误差参数的方法。
2. 加速度计参数估计
其实我们在上面理清了这种标定思路以后,算法方面就没太多可说的了。加速度计就是两个矢量的模做差。

等号右侧,前者是重力加速度,后者是加速度计输出。
3. 陀螺仪参数估计
对于陀螺仪也是同样的道理
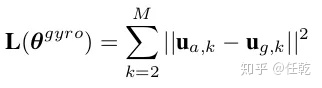
等号右侧,前者是加速度计输出,后者是按照陀螺仪计算的姿态对重力的分解。
四、总结与思考
1. 对于陀螺仪来讲,虽然我们没有使用地球自转角速度做基准,但是它在陀螺仪各个轴上的分量是天然存在的,如果我们强行忽略它,那么就会给标定带来误差。
这个误差要不要处理,取决于你的器件精度,如果本身零偏不稳定性已经大大超出了地速分量,那么考虑它就意义不大,如果比地速小很多,存在这种误差就相当于浪费了器件自身性能。
剔除地速需要有地理系下的姿态才行,不然无法对地速做分解,一种可行的办法是添加磁力计信息,它和地理系是关联的,
这个方法已经在其他论文中出现了:《Automatic Calibration for Inertial Measurement Unit》。
在工程使用中,有些IMU没有磁力计,再添加一个又显得有些繁琐,但如果能在初始时刻给IMU一个大致的航向,就已经能把大部分的地速分量给剔除掉了,
剩下的残差部分,如果能比器件零偏不稳定性小一个数量级,也就足够了。
2. 最后,希望大家思考一个问题,本次介绍的方法和系统级标定比,它们各有什么样的优缺点?各自适合什么样的标定需求?面对一个任务的时候,我们应该怎么选择?
下一篇文章,我们就来一起讨论这些问题。














 3201
3201











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









