







感谢: 紫薯萝卜 https://zhuanlan.zhihu.com/p/77975605
1. 改进思路
接下来的章节中会介绍MSCKF的各种改进方法,目的都是为了提高VIO的精度、稳定性、鲁棒性,其中大部分是为了提高精度。VIO的核心是视觉和IMU的融合,所以不论是滤波方法(MSCKF)还是优化方法(VINS),改进的思路都可以从IMU、视觉和融合这三方面着手:
- 提升IMU
- 更高精度的IMU
- 更准的IMU标定模型
- 更高的采样频率(200HZ, 500HZ, 1000HZ)
- 更高精度的IMU积分方法:Euler, Midpoint, RK4
- 提升视觉
- 提升图像质量:高动态范围相机,ISP,前端直方图均衡化
- 增加图像观测:加大FOV,扩展双目或多目
- 使用性能更好的特征:SURF, SIFT
- 全局快门
- 提升融合算法
- 数据同步:传感器数据同步对VIO精度影响非常大,对数据做硬件同步、软件同步,还可以将同步误差
 加到算法中实时估计,进一步降低同步误差的影响。
加到算法中实时估计,进一步降低同步误差的影响。 - 标定参数估计:包括相机内参标定、IMU与相机之间外参标定、双目外参标定,标定参数不准也会影响算法精度,可以将标定参数加入到算法中,以标定结果作为初始值,在VIO过程中实时估计内外参。
- 视觉观测模型扩展:视觉观测约束越多,状态估计精度越高。一方面可以扩展双目或多目,观测模型中加入更多的残差项;另一方面可以引入直线等特征,在环境纹理不足时提高精度。
- 能观性改进:理论上VIO位姿有4个维度是不能观的,包括3DoF全局位置和1DoF绕重力轴的旋转(Yaw角),而MSCKF中Yaw角被错误的能观了,这就产生了Inconsistency,使得算法精度变差。通过合理调整EKF系统的线性化点(FEJ)来改变系统的能观性秩,从而提升算法精度。
2. 双目扩展
MSCKF从单目扩展到双目只需要做非常少的改动:
- 前端只需要对左目的特征点跟踪其右目观测,将跟踪特征观测的维度从2维
 扩展到4维
扩展到4维 
- 后端框架上只把左目相机加入到状态向量中,根据双目外参可以算出相机状态对应的右目相机位姿,然后特征残差模型从单目的2维残差变成双目的4维残差。
双目的残差定义如下:
其中,![]() 为特征
为特征 ![]() 在相机
在相机 ![]() 的双目观测。
的双目观测。
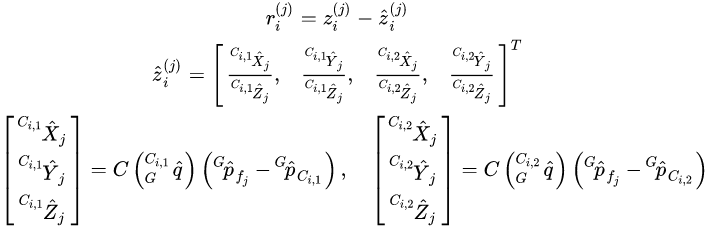
单特征对单相机残差模型:

残差模型共4行,上面两行是左目残差对左目相机状态的残差模型,Jacobian与单目一致(见之前Measurement Update章节),下面两行是右目残差对左目相机的残差模型,Jacobian如下:

式中各导数项在之前Measurement Update章节都已推导,右目残差的Jacobian比左目残差多一项


3. 外参在线标定
在原始MSCKF中,相机外参被当做已知量,需要事先标定。如果标定参数不准,势必会导致算法精度下降。因此,可以将标定参数加入到状态向量中进行估计,以标定结果作为初值,在VIO运动过程中实时修正外参状态。
3.1 相机与IMU之间的外参估计
相机与IMU之间的外参为 ![]() ,将其加入到状态向量后,状态向量变为:
,将其加入到状态向量后,状态向量变为:

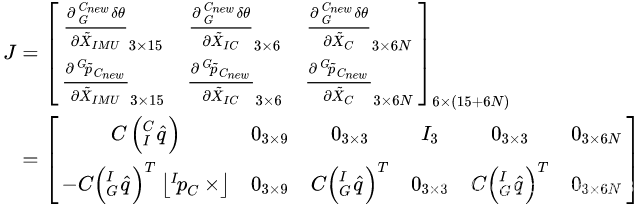
相机与IMU之间的外参只在State Augmentation时被用到,所以加入到状态估计后,唯一的改动是State Augmentation的Jacobian中要加上新增相机状态对外参的Jacobian,如下:
3.2 双目外参估计
左右目之间的外参为 ,同样扩展到状态向量中,唯一的改动是在残差模型的 ![]() 中需要加入残差对外参状态的Jacobian,而且只有右目残差有,左目残差与外参无关。
中需要加入残差对外参状态的Jacobian,而且只有右目残差有,左目残差与外参无关。
右目残差对外参的Jacobian如下:

推导过程:

3.3 测试效果
为了凸显外参估计的效果,对外参的平移量加了0.02的误差,测试估计值能否收敛到真实值附近。测试发现双目外参 X轴(基线方向)能比较好的收敛, Z轴(深度方向)次之, Y轴收敛性最差,相机与IMU之间的外参收敛性不好,一开始以为是初始化协方差给太小了,调大初始化协方差后,估计量波动幅度会变大,但仍未收敛到真值。
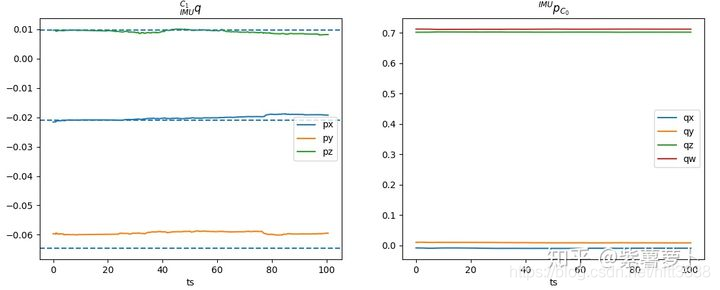
相机与IMU外参在线标定结果
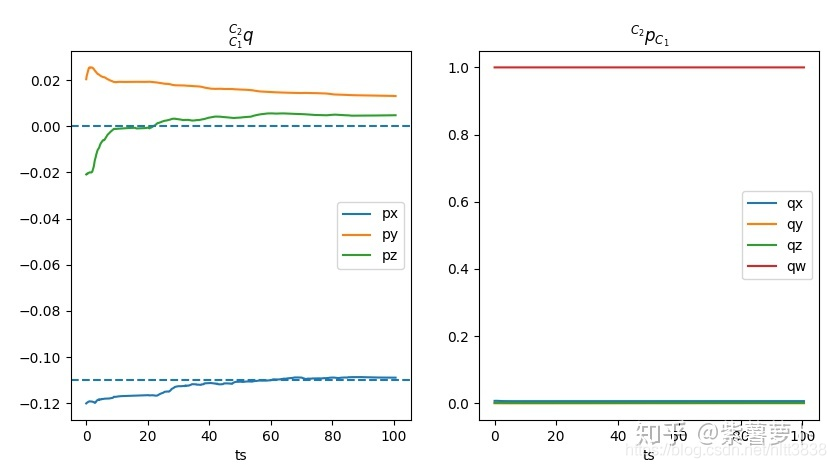
双目外参在线标定结果
在EuRoC数据集上进行对比测试,测试使用固定外参,在标定外参平移量 x 轴手动加0.02,0.05的误差,以及加入外参估计等情况下的RMSE,结果如下:
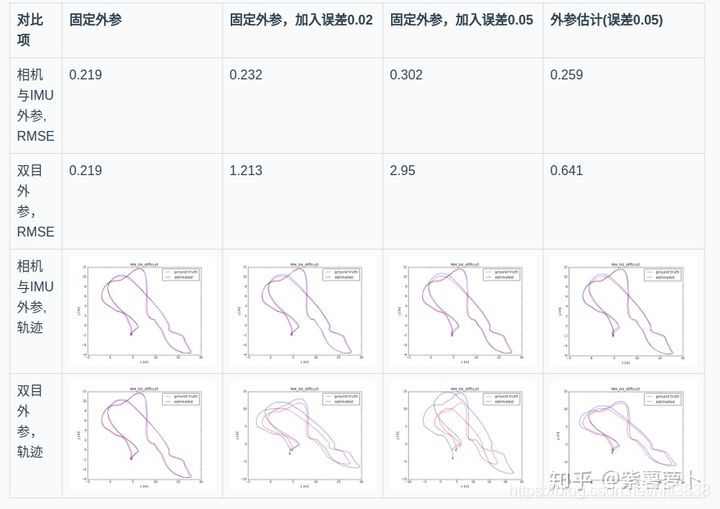
测试结论:
- 随着外参误差不断变大,VIO误差也不断变大,加入外参估计以后,会减少VIO误差,但仍比使用真值要差。
- VIO对相机与IMU之间偏移量的敏感度较低,就算加入很大误差,VIO精度也没有明显变差;而VIO对双目外参(基线)的敏感度很高,基线变大,VIO轨迹明显尺度变大,加入外参估计后,效果有明显改善。
个人观点:VIO运动过程中,有些维度约束比较强,所以能够比较准确的估计,而有些维度约束较弱,难以估计,而相机与IMU之间的偏移量就属于约束较弱的项。
3.4 状态向量扩展
扩展状态向量其实是一种通用思路,对于不准的参数量都可以加入到状态向量中估计,只需要在MSCKF中加入该状态的模型,一般来说,要么修改State Augmentation中的Jacobian,要么修改观测残差模型中的Jacobian。这里只介绍了两种外参的估计,其实相机内参、后面将介绍的同步误差 ![]() 也都可加入到状态向量中。
也都可加入到状态向量中。
那是不是估的状态越多越好呢?答案是否定的。首先,状态越多计算量越大,算法也越复杂;再者,状态向量维度越高,系统自由度越大,状态估计精度也越差。一般如果某些量足够准确,那就没必要对其进行估计。内外参估计,一方面是因为标定本身存在误差,另一方面是因为传感器长时间使用外参也会发生改变,为了避免频繁标定,才将其加入到状态估计中,而且一般会将内外参状态的初始协方差设得比较小,让其缓慢地修正,避免内外参波动太大造成VIO精度下降。
参考文献
- Sun K, Mohta K, Pfrommer B, et al. Robust Stereo Visual Inertial Odometry for Fast Autonomous Flight[J]. IEEE Robotics & Automation Letters, 2018, 3(2):965-972.
- Li M , Mourikis A I . High-precision, consistent EKF-based visual-inertial odometry[J]. The International Journal of Robotics Research, 2013, 32(6):690-711.














 555
555











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









