









 苏黎世联邦理工学院与MenziMuck合作,利用5G网络、虚拟现实技术和低延迟多相机系统,实现远程操控挖掘机。在2019年的Bauma博览会上,他们展示了这一技术,操作员通过VR设备远程控制位于不同地点的挖掘机,获得如同亲临现场的体验。系统中,XIMEA工业相机与MRTech的图像处理方案在NVIDIA Jetson TX2平台上运行,确保高精度和实时性。
苏黎世联邦理工学院与MenziMuck合作,利用5G网络、虚拟现实技术和低延迟多相机系统,实现远程操控挖掘机。在2019年的Bauma博览会上,他们展示了这一技术,操作员通过VR设备远程控制位于不同地点的挖掘机,获得如同亲临现场的体验。系统中,XIMEA工业相机与MRTech的图像处理方案在NVIDIA Jetson TX2平台上运行,确保高精度和实时性。

图1:Menzi Muck蜘蛛挖掘机遥控操作的低延迟多相机视频系统
项目简介
随着无线通信(5G 网络)、可视化技术(虚拟现实)、控制单元和传感器的技术进步,在虚拟环境中培训机器操作员以及远程操作成为可能。
苏黎世联邦理工学院的机器人系统实验室开展了一个机器视觉项目,其目标是为挖掘机操作员提供尽可能精确和真实的体验。在该项目中操作员将获得所有相关信息,就像他在挖掘机的驾驶舱中一样。此外,操作员可以接收挖掘机中没有的额外语义数据,从而使其远程工作更加方便。
环境与展示
步行挖掘机制造商Menzi Muck AG与苏黎世联邦理工学院合作,在2019 年 Bauma 博览会上展示了这种远程操作挖掘机。展示包括用于培训操作员(使用 VR 护目镜)的 Menzi Muck 模拟器,该模拟器连接到位于不同城市的挖掘机。
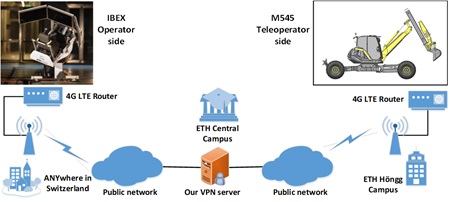
图2: 移动设备的通信结构

图3:户外试验场
挖掘机集成了基于XIMEA工业相机的多相机视觉系统,这些相机使用MRTech提供的低延迟图像处理解决方案, 并在 NVIDIA Jetson TX2 平台上运行。
如图3所示,挖掘机位于苏黎世 ETH Hönggerberg 校区的户外试验场,配备工业 wifi 和 4G-5G 路由器进行传输和控制。由于是室外环境,摄像机的曝光会动态更新。
注:该步行式遥控挖掘机系统由许多重要部分组成,详情可访问https://www.ximea.com/en/corporate-news/excavator-remotely-operated-tele
关于 XIMEA
20 多年来,德国 XIMEA 公司一直致力于为运动控制、装配、机器人学、工业检测和过程控制等领域的机器视觉应用设计最智能、最紧凑的工业相机,同时为生命科学、安全和国防应用领域设计科学相机。其中推出的 MQ 系列 USB 3.0 超高速工业机器视觉相机,为高速工业相机树立了全新的基准。
关于盈美智
北京盈美智是XIMEA中国区正式代理商,如需了解更多XIMEA工业相机系列产品,请联系本站客服。此外,公司还代理销售其他国际各大知名厂商的工业相机、图像采集卡、光源及图像处理软件等视觉产品,还可根据用户的实际要求,进行从硬件到软件的全套图像处理系统集成。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









