






前言:无监督学习想快一点复习完,就转入有监督学习
聚类算法主要包括哪些算法?
主要包括:K-means、DBSCAN、Density Peaks聚类(局部密度聚类)、层次聚类、谱聚类。
若按照聚类的方式可划分成三类:第一类是类似于K-means、DBSCAN、Density Peaks聚类(局部密度聚类)的依据密度的聚类方式;
第二种是类似于层次聚类的依据树状结构的聚类方式;
第三种是类似于谱聚类的依据图谱结构的聚类方式。
什么是无监督学习?
无监督学习也是相对于有监督学习来说的,因为现实中遇到的大部分数据都是未标记的样本,要想通过有监督的学习就需要事先人为标注好样本标签,这个成本消耗、过程用时都很巨大,所以无监督学习就是使用无标签的样本找寻数据规律的一种方法
聚类算法就归属于机器学习领域下的无监督学习方法。
无监督学习的目的是什么呢?
可以从庞大的样本集合中选出一些具有代表性的样本子集加以标注,再用于有监督学习
可以从无类别信息情况下,寻找表达样本集具有的特征
分类和聚类的区别是什么呢?
对于分类来说,在给定一个数据集,我们是事先已知这个数据集是有多少个种类的。比如一个班级要进行性别分类,我们就下意识清楚分为“男生”、“女生”两个类;该班又转入一个同学A,“男ta”就被分入“男生”类;
而对于聚类来说,给定一个数据集,我们初始并不知道这个数据集包含多少类,我们需要做的就是将该数据集依照某个“指标”,将相似指标的数据归纳在一起,形成不同的类;
分类是一个后续的过程,已知标签数据,再将测试样本分入同标签数据集中;聚类是不知道标签,将“相似指标”的数据强行“撸”在一起,形成各个类。
一、DBSCAN聚类
定义:DBSCAN(Density-Based Spatial Clustering of Applications with Noise,具有噪声的基于密度的聚类方法)是一种基于密度的空间聚类算法。该算法将具有足够密度的区域划分为簇,并在具有噪声的空间数据库中发现任意形状的簇,DBSCAN算法将“簇”定义为密度相连的点的最大集合。
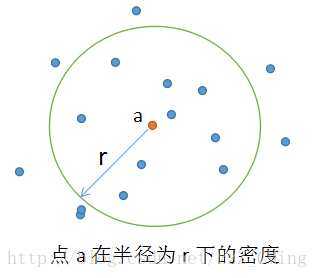
1、传统的密度定义:基于中心的方法
传统的密度定义方法——事先给定半径r,数据集中点a的密度,要通过落入以点a为中心以r为半径的圆内点的计数(包括点a本身)来估计。很显然,密度是依赖于半径的。如下图所示:
2、DBSCAN中依照密度,对样本点的划分
基于以上密度的定义,我们可以将样本集中的点划分为以下三类:
核心点:在半径r区域内,含有超过MinPts数目(最小数目)的点,称为核心点;
边界点:在半径r区域内,点的数量小于MinPts数目,但是是核心点的直接邻居;
噪声点:既不是核心点也不是边界点的点
下图可以很清楚的区分三种点:
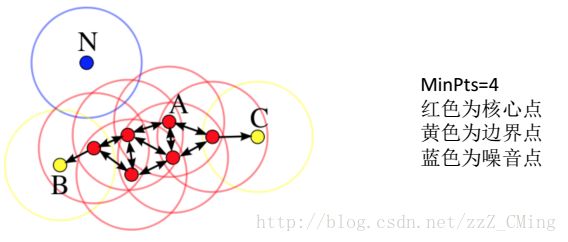
依照上图以及三种点的定义,可以得到:噪声点是不会被聚类纳入的点,边界点与核心点组成聚类的“簇”。
3、介绍三个有趣的概念
直接密度可达:在给定一个对象集合D,如果p在q的r领域内,且q是一个核心点对象,则称对象p从对象q出发时是直接密度可达的
密度可达:在给定对象集合D中,如果存在一个对象链q–>e–>a–>k–>l–>p,任意相邻两个对象间都是直接密度可达的,则称对象p是对象q关于r邻域内、MinPts数目下,是密度可达的;
密度相连:如果在对象集合D中存在一个对象O,使得对象p和q都是从O关于r邻域内、MinPts数目下,是密度相连的。
如下图所示:r用一个相应的半径表示,设MinPts=3,分析Q、M、P、S、O、R这5个样本点之间的关系。
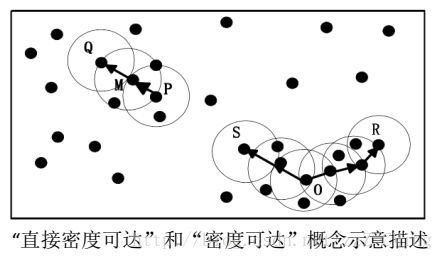
根据以上概念可知:由于有标记的各点M、P、O和R的r邻域均包含3个以上的点,因此它们都是核对象;M是从P的“直接密度可达”;Q是从M的“直接密度可达”;基于上述结果,Q是从P的“密度可达”;但P从Q是无法“密度可达”(非对称的);类似的,S和R都是从O的“密度可达”;O、R都是从S的“密度相连”。
也就是说:核心点能够连通(密度可达),它们构成的以r为半径的圆形邻域相互连接或重叠,这些连通的核心点及其所处的邻域内的全部点构成一个簇。
4、DBSCAN聚类算法原理
DBSCAN通过检查数据集中每个点的r邻域来搜索簇,如果点p的r邻域包含多于MinPts个点,则创建一个以p为核心对象的簇;
然后, DBSCAN迭代的聚集从这些核心对象直接密度可达的对象,这个过程可能涉及一些密度可达簇的合并;
当没有新的带你添加到任何簇时,迭代过程结束。
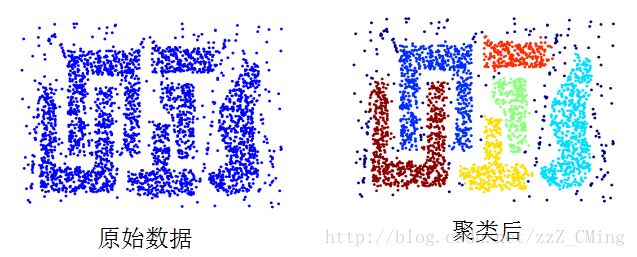
DBSCAN聚类算法效果展示如下图:
5、DBSCAN聚类算法优缺点
优点:基于密度定义,可以对抗噪声,能处理任意形状和大小的簇
缺点:当簇的密度变化太大时候,聚类得到的结果会不理想;对于高维问题,密度定义也是一个比较麻烦的问题。
6、DBSCAN聚类算法
# -*- coding:utf-8 -*- # -*- author:zzZ_CMing # -*- 2018/04/10;15:38 # -*- python3.5 import numpy as np import matplotlib.pyplot as plt from sklearn import datasets import matplotlib.colors # 创建Figure fig = plt.figure() # 用来正常显示中文标签 matplotlib.rcParams['font.sans-serif'] = [u'SimHei'] # 用来正常显示负号 matplotlib.rcParams['axes.unicode_minus'] = False X1, y1 = datasets.make_circles(n_samples=5000, factor=.6, noise=.05) X2, y2 = datasets.make_blobs(n_samples=1000, n_features=2, centers=[[1.2,1.2]], cluster_std=[[.1]],random_state=9) # 原始点的分布 ax1 = fig.add_subplot(311) X = np.concatenate((X1, X2)) plt.scatter(X[:, 0], X[:, 1], marker='o') plt.title(u'原始数据分布') plt.sca(ax1) """ # K-means聚类 from sklearn.cluster import KMeans ax2 = fig.add_subplot(312) y_pred = KMeans(n_clusters=3, random_state=9).fit_predict(X) plt.scatter(X[:, 0], X[:, 1], c=y_pred) plt.title(u'K-means聚类') plt.sca(ax2) """ # DBSCAN聚类 from sklearn.cluster import DBSCAN ax3 = fig.add_subplot(313) y_pred = DBSCAN(eps = 0.1, min_samples = 10).fit_predict(X) plt.scatter(X[:, 0], X[:, 1], c=y_pred) plt.title(u'DBSCAN聚类') plt.sca(ax3) plt.show()
效果展示: 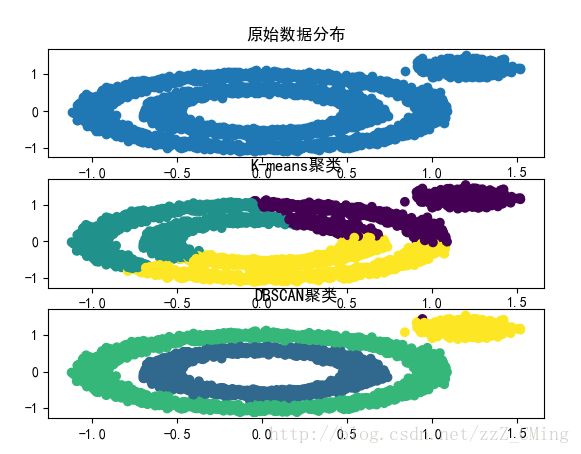
∞∞∞∞∞


公众号回复“机器学习”,
邀你加入{ IT派AI机器学习群 }














 1433
1433











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









